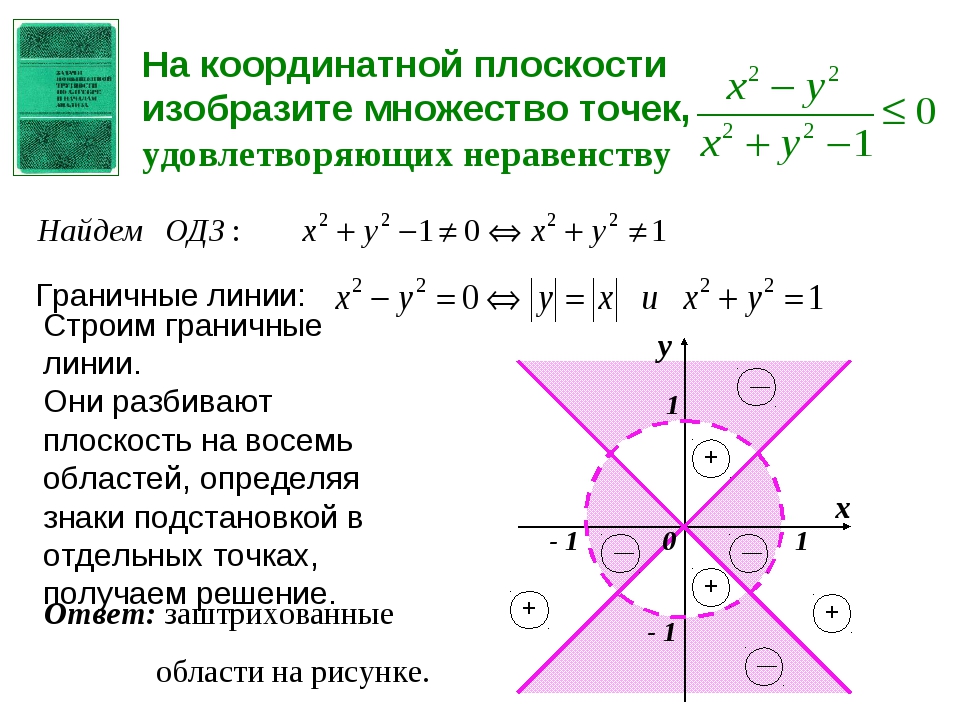
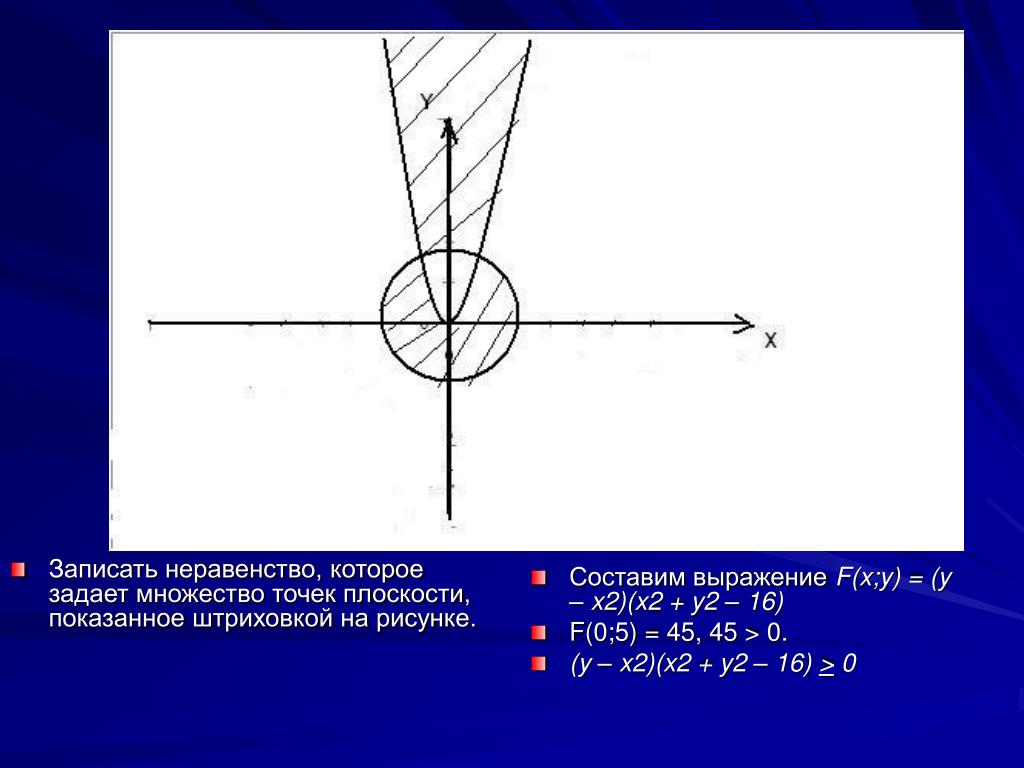
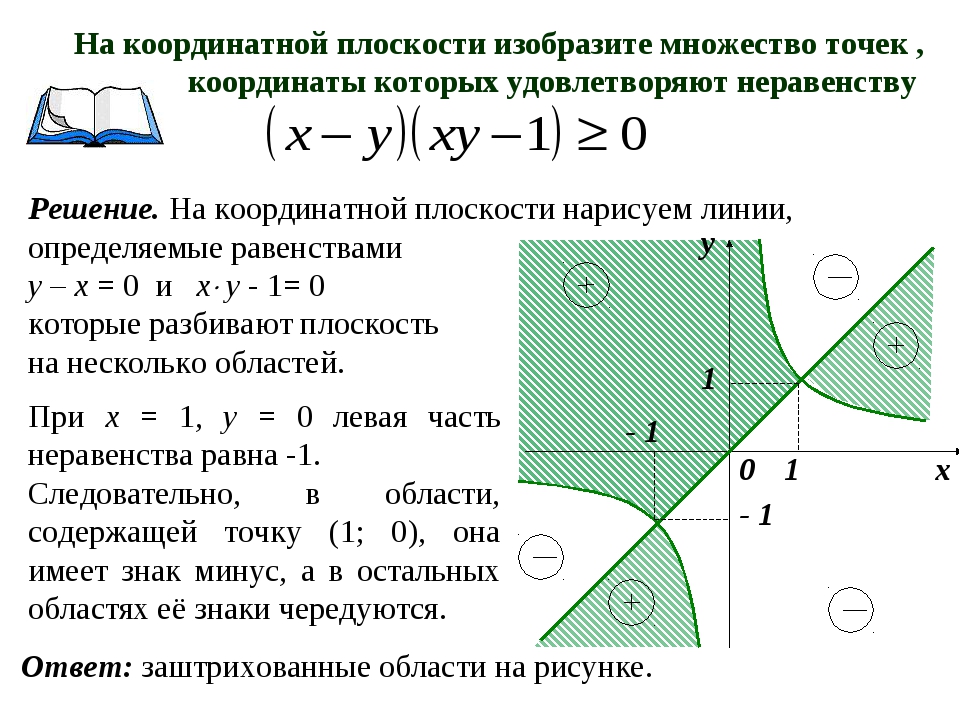
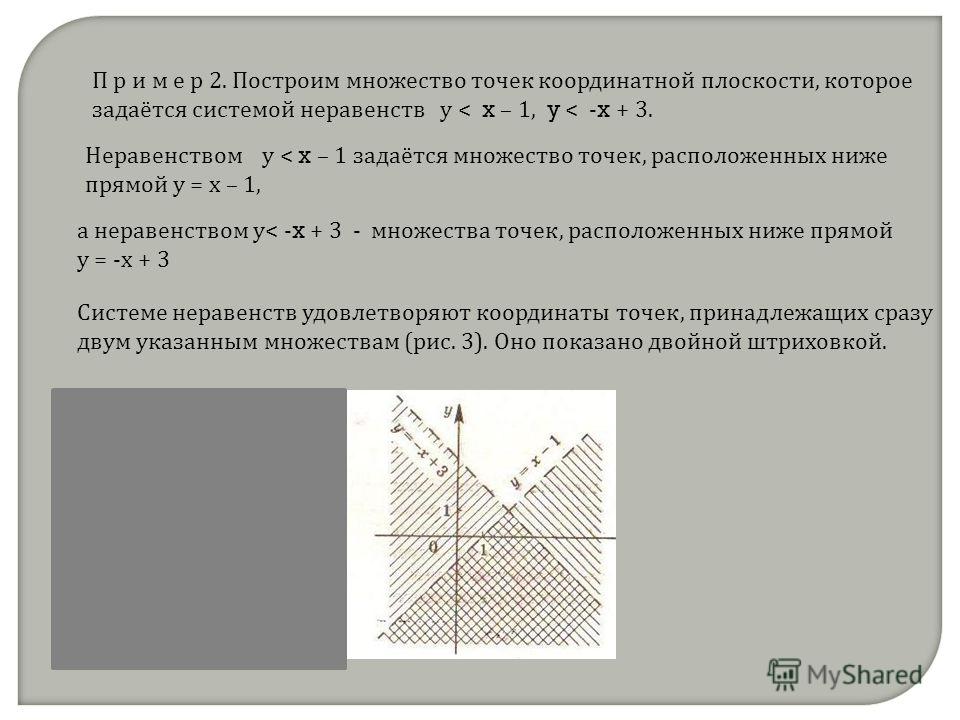
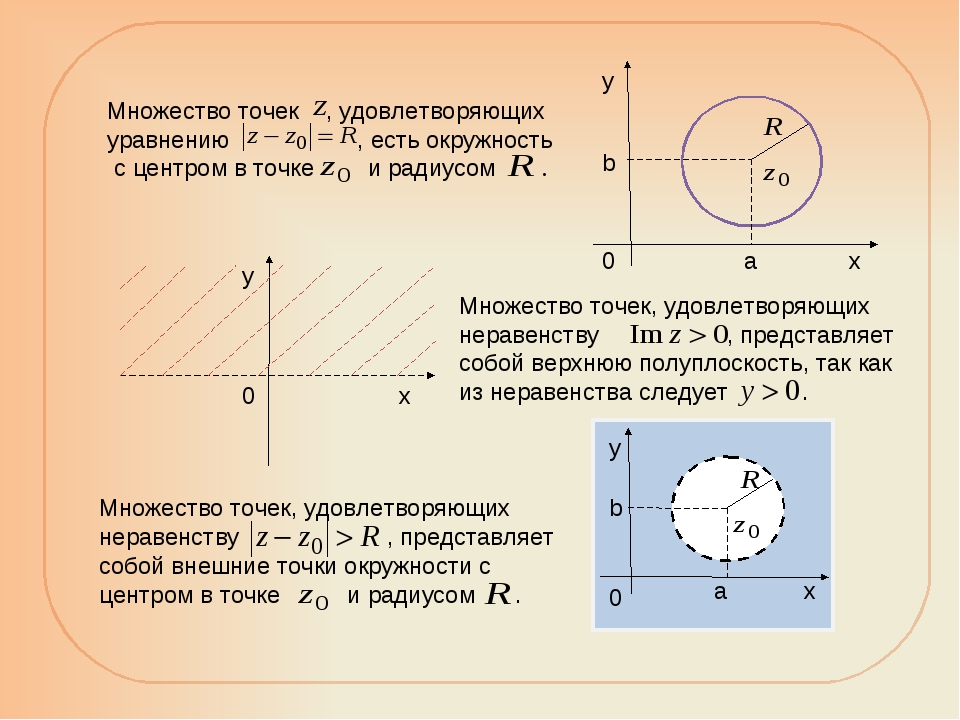
Каким условием можно задать множество точек изображенное на рисунке
Представим на координатной плоскости множество точек, удовлетворяющих условию х = 5 и х = -4,
На прямой может быть расположено неограниченное количество точек. И у всего этого множества точек, координаты удовлетворяют условиям х = 5 и х = -4; у = -4 и у = 1.
На координатной прямой неравенству х < — 4 соответствует открытый луч, а на координатной плоскости это же условие определяет полуплоскость, она находится левее прямой х = -4.
Изобразим множество точек, удовлетворяющих условию х > 3. Проанализируем, что это за точки:
— множество точек, абсцисса которых больше или равна 3
— определяем, где будут находиться точки, абсцисса которых больше 3; ответ – правее;
— множество всех точек удовлетворяющих условию х > 3 покажем при помощи штриховки;
х > 3 задает полуплоскость, находящаяся правее прямой х = 3 и все точки этой прямой. Прямую изображаем одной цельной линией, этим указываем, что все точки расположенные на прямой так же включены во множество.
Прямую изображаем одной цельной линией, этим указываем, что все точки расположенные на прямой так же включены во множество.
Представим множество точек, удовлетворяющих условию у < — 2
Аналогично представим множество точек, удовлетворяющих условию у > 1.
Постройте множество точек у > 1. По аналогии, точкам этого множества присуще свойство — у них ордината больше 1.
Следовательно, они будут находиться выше прямой у
= 1. В соответствии со знаком неравенства точки прямой у = 1 не удовлетворяют условию y > 1. Графически мы это покажем, изобразив прямую у = 1 пунктиром.Представим множество точек, соответствующих условию у > 1 так:
Представим на координатной плоскости множества точек, соответствующих условию: -2 ≤ х ≤ 2.
Сходным образом представим множество точек соответствующих условию: 1 < у < 4.
От чего зависит средняя ошибка выборки
Онлайн калькулятор рядов сходимости
Итоговое тестирование по алгебре 7 класс
Описание работы
Итоговый тест за курс алгебры 7 класса представлен в двух равносильных вариантах и предназначен для оперативной проверки достижения учащимися уровня базовых требований, т.е. проверки знания и понимания понятий и их свойств, владения основными алгоритмами, умения применять знания в несложных ситуациях.
Итоговое тестирование рассчитано на один урок (45 минут).
Данный тест состоит из 14 заданий двух видов: с выбором ответа, с кратким ответом, составленных по принципу основного государственного экзамена.
Для всех заданий теста нужно указать только один ответ: или выбрать верный ответ из четырех предложенных, или вписать ответ в отведенное для этого место, или соотнести два ряда объектов, занеся результат в таблицу.
Для получения ответа часто требуется выполнить письменное решение предложенного задания. Решение выполняется на черновике, достаточно аккуратно, четко и разборчиво, чтобы при необходимости его можно было предъявить для проверки.
Критерии оценивания:
Оценка
2
3
4
5
Количество верно выполненных заданий
Меньше 8
8-10
11-12
13-14
Итоговый тест составлен на основе материалов методического пособия к учебнику Алгебра 7 под. Редакцией Г.В. Дорофеева: Алгебра. Тематические тесты. 7 класс: пособие для общеобразовательных организаций/ Л.В. Кузнецова, С.С. Минаева, Л.О. Рослова и др. Рос. акад. наук. Рос. акад. образования. – М.: Просвещение, 2014. – 128 с. (Академический школьный учебник).
Ключ к итоговому тесту
Задание
1 вариант
2 вариант
1
4
2
-1,5
-1,6
3
1
3
4
4
3
5
1,5
1,8
6
2
2
7
3
1
8
3x2(y-4x)
(b-6a)(b+6a)
9
324
213
10
4
4
11
-c2
-3a2+28a
12
32
13
4
2
14
1
3
Итоговое тестирование по алгебре, 7 класс
1 вариант
Расположите в порядке возрастания числа: .


; 2) ; 3) ; 4) .
Найдите значение выражения
Ответ:_______________
При покупке соковыжималки стоимостью 4000р. покупатель предъявил дисконтную карту, дающую право на 3,5% скидки. Сколько он заплатил за соковыжималку?
3860 р. 2) 140 р. 3) 1400 р. 4) 3996,5 р.
В каком случае знак неравенства поставлен неверно?
3)
4)
Найдите неизвестный член пропорции .
Ответ:_____________
Решите уравнение 2х-7=10-3(х+2)
-0,6 2) 2,2 3) 3 4) 4,6
Прочитайте задачу: «От турбазы до автостанции турист доехал на велосипеде за 2ч.
Чтобы пройти это расстояние пешком, ему понадобилось бы 6 ч. Известно, что идет он со скоростью, на 4 км/ч меньшей, чем едет на велосипеде. С какой скоростью едет турист?»
 Чтобы пройти это расстояние пешком, ему понадобилось бы 6 ч. Известно, что идет он со скоростью, на 4 км/ч меньшей, чем едет на велосипеде. С какой скоростью едет турист?»
Чтобы пройти это расстояние пешком, ему понадобилось бы 6 ч. Известно, что идет он со скоростью, на 4 км/ч меньшей, чем едет на велосипеде. С какой скоростью едет турист?»Выберите уравнение, соответствующее условию задачи, если буквой х обозначена скорость (в км/ч), с которой идет турист.
- 6х=2(х-4) 3) 6х=2(х+4)
2х=6(х-4) 4)
Вынесите за скобки общий множитель: 3х2у-12х3.
Ответ:_______________
Для каждого выражения из верхней строки укажите равное ему выражение из нижней строки.
А) Б) В)
1) 2) 3) 4)
Ответ:
А
Б
В
Какой многочлен надо прибавить к многочлену , чтобы сумма была равна 0?
3)
4)
Упростите выражение b(b+2c)-(b+c)2
Ответ:__________________
Каким условием можно задать множество точек координатной плоскости, изображенное на рисунке?
1) х≤3 2) у≥3 3) у≤3 4) х≥3
Сколькими способами можно построить в ряд четырех спортсменов?
8 2) 12 3) 16 4) 24
Статистика показывает, что вероятность рождения мальчика равна 52%.
Сколько мальчиков можно ожидать из 100 тыс. новорожденных?
 Сколько мальчиков можно ожидать из 100 тыс. новорожденных?
Сколько мальчиков можно ожидать из 100 тыс. новорожденных?52000 2) 5200 3) 520 4) 52
Итоговое тестирование по алгебре, 7 класс
2 вариант
Расположите в порядке возрастания числа: .
2) 3); 4) .
Найдите значение выражения
Ответ:_______________
Клиент банка открыл счет на 6000р., годовой доход по которому составляет 5,5%. Какая сумма будет на счете через год?
330 р. 2) 3300 р. 3) 6330 р. 4) 6005,5 р.
В каком случае знак неравенства поставлен неверно?
3)
4)
Найдите неизвестный член пропорции .
Ответ:_____________
Решите уравнение
-0,5 2) -4,5 3) 9 4) 4, 5
Прочитайте задачу: «Мастер и ученик вместе изготовили 42 деревянные ложки.
Мастер работал 6ч, а ученик 4 ч, причем ученик изготавливал за час на 3 ложки меньше, чем мастер?»
 Мастер работал 6ч, а ученик 4 ч, причем ученик изготавливал за час на 3 ложки меньше, чем мастер?»
Мастер работал 6ч, а ученик 4 ч, причем ученик изготавливал за час на 3 ложки меньше, чем мастер?»Какое уравнение соответствует условию задачи, если буквой х обозначено число ложек, которые за один час изготавливал мастер?
6х+4(х-3)=42 3) 6(х-3)+4х=42
6х+4∙=42 4) 2
Вынесите за скобки общий множитель: b2-36a2.
Ответ:_______________
Для каждого выражения из верхней строки укажите равное ему выражение из нижней строки.
А) Б) В)
1) 2) 3) 4)
Ответ:
А
Б
В
Какой многочлен надо прибавить к многочлену , чтобы сумма была равна 0?
1) 3)
2) 4)
Упростите выражение 5a(a-4)-8a(a-6)
Ответ:__________________
Каким условием можно задать множество точек координатной плоскости, изображенное на рисунке?
1) х≥1 2) 1≤х≤4 3) 1≤у≤4 4) у≤4
Сколько двузначных чисел можно составить, используя цифры 0, 1, 2, 3?
8 2) 12 3) 16 4) 24
В секции гимнастики занимается десять мальчиков, рост которых (в см) равен: 128, 128, 129, 130, 130, 132, 135, 135, 137, 142.
Сколько среди них мальчиков, рост которых выше среднего роста этой группы?
 Сколько среди них мальчиков, рост которых выше среднего роста этой группы?
Сколько среди них мальчиков, рост которых выше среднего роста этой группы?6 2) 5 3) 4 4) 2
Обрезка рисунка по фигуре
Если вы хотите изменить контур фотографии, чтобы сделать ее фигурой (например, круг или закругляющий прямоугольник), используйте инструмент обрезки на ленте .
Вы можете обрезать фигуру в Word, PowerPoint, Outlook или Excel.
Обрезка изображения по фигуре, например по кругу
Вы можете быстро изменить форму рисунка, обрезав его до определенной фигуры. При этом рисунок автоматически изменяется для заполнения фигуры при сохранении пропорций.
(Если вы хотите обрезать один и тот же рисунок до двух фигур, сделайте его копию и обрезка каждого рисунка по отдельности.)
-
С помощью > рисунка можно добавить изображение в файл Office (например, документ Word, PowerPoint презентацию или Outlook сообщение электронной почты).
-
Щелкните рисунок.
Вы можете обрезать несколько рисунков одновременно, но только до одной и той же фигуры. (Но в Word, это трудно, так как вы не можете выбрать несколько рисунков с параметром разметки В тексте по умолчанию.)
-
В разделе Работа с рисунками на вкладке Формат в группе Размер щелкните стрелку под кнопкой Обрезать.
-
В появившемся меню щелкните Обрезать по фигуре и выберите фигуру, по которой нужно выполнить обрезку.
Эта фигура будет сразу применена к рисунку.
-
Затем с помощью > Вписать или Обрезать > заливка можно изменить размер рисунка в фигуре:
-
Заполнить Заливка рисунком всей фигуры.
Некоторые внешние края рисунка могут быть обрезаны. На полях фигуры не будет пустого места. -
Вписать Помещает рисунок целиком в фигуру с сохранением исходных пропорций рисунка. На полях фигуры может быть пустое место.
(При выборе параметра Вписать или Заливка на краях и углах рисунка появляются черные обрезные углы.)
-
-
Вы можете настроить положение рисунка в рамке, вытянув его и перетащив в нужное место. Например, это поможет вы центром наиболее важной части рисунка в фигуре, примененной к рисунку.
-
Обрезка полей рисунка путем перетаскиванием черного обрезного хим.
Описание
Действие
Обрезка одной стороны
Перетащите маркер обрезки на этой стороне к центру рисунка
Обрезка двух смежных сторон одновременно
Перетащите угловой маркер обрезки между этими сторонами к центру рисунка
Одинаковая обрезка двух параллельных сторон одновременно
Перетащите маркер обрезки на одной из этих сторон к центру рисунка, удерживая нажатой клавишу CTRL
-
После этого нажмите кнопку Обрезать еще раз.

 Некоторые внешние края рисунка могут быть обрезаны. На полях фигуры не будет пустого места.
Некоторые внешние края рисунка могут быть обрезаны. На полях фигуры не будет пустого места.
Начните с фигуры и добавьте в нее изображение
Вы можете добавить рисунок в качестве заливки фигуры, а затем изменить или обрезать ее.
Добавление рисунка к фигуре
-
Добавьте фигуру в документ (инструкции см. в статье Добавление фигур) и щелкните ее.
-
На вкладке Средства рисования в разделе Формат в группе Стили фигур щелкните Заливка фигуры и выберите пункт Рисунок.
-
Выберите тип изображения (Из файла или Изображения из Интернета), перейдите к рисунку и вставьте его.

Изменение размера фигуры
Чтобы изменить размеры фигуры, сохранив ее базовое форматирование, выделите фигуру и перетащите один из маркеров изменения размера.
Настройка заполнения фигуры рисунком
Если рисунок обрезан или заполняет фигуру не полностью, используйте инструменты Вписать и Заполнить в меню Обрезать.
-
Щелкните фигуру, созданную путем выбора пунктов Заливка фигуры > Рисунок.
-
В разделе Работа с рисунками на вкладке Формат в группе Размер щелкните стрелку под кнопкой Обрезать.
Появится меню параметров обрезки.-
Выберите Вписать, если хотите, чтобы весь рисунок поместился внутри фигуры. Исходные пропорции рисунка сохранятся, но в фигуре может быть пустое место.
-
Выберите Заливка, чтобы рисунок полностью заполнил фигуру. При этом его часть, выходящая за пределы фигуры, будет обрезана.
-
-
Выберите пункт Заливка или Вписать.
-
Заполнить — размеры рисунка устанавливаются по высоте и ширине фигуры в зависимости от того, какой размер больше.
При этом фигура заполняется рисунком, а остальные части рисунка удаляются. -
Функция Вписать задает размер рисунка, чтобы его высота и ширина будут совпадать с границами фигуры. Это функция вписывает максимально возможную часть рисунка в фигуру, но некоторые участки фигуры могут остаться пустыми.
Вы можете перетащить рисунок, чтобы выбрать часть, отображаемую в фигуре.
-
-
При необходимости измените область обрезки с помощью маркеров, как описано в разделе Обрезка рисунка.
-
Когда все будет готово, нажмите клавишу ESC или щелкните за пределами рисунка.
 Появится меню параметров обрезки.
Появится меню параметров обрезки. При этом фигура заполняется рисунком, а остальные части рисунка удаляются.
При этом фигура заполняется рисунком, а остальные части рисунка удаляются.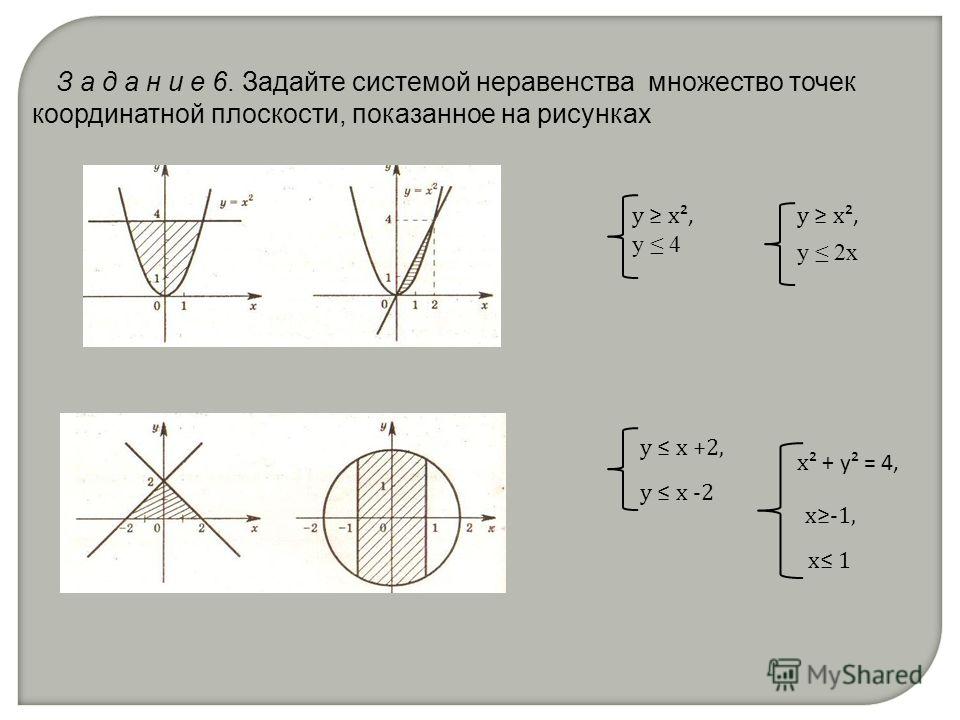
Изменение или обрезка фигуры с помощью команды «Начать изменение узлов»
Для фигур инструменты обрезки недоступны, но вы можете воспользоваться командой Начать изменение узлов, чтобы изменить фигуру вручную.
-
Выберите фигуру, которую вы хотите изменить.
-
В разделе Средства рисования на вкладке Формат в группе Вставка фигур нажмите кнопку Изменить фигуру и выберите команду Начать изменение узлов.
-
Перетащите вершины (черные точки по периметру фигуры) в нужные позиции.
-
Чтобы удалить вершину, щелкните ее, удерживая нажатой клавишу CTRL.
Чтобы добавить вершину, щелкните контур фигуры там, где ее еще нет, удерживая нажатой клавишу CTRL.
 Чтобы добавить вершину, щелкните контур фигуры там, где ее еще нет, удерживая нажатой клавишу CTRL.
Чтобы добавить вершину, щелкните контур фигуры там, где ее еще нет, удерживая нажатой клавишу CTRL.См. также
Обрезка рисунка в Office
Вырезание или обложка части рисунка
Если вы хотите изменить контур фотографии, чтобы сделать ее фигурой (например, круг или закругляющий прямоугольник), используйте инструмент обрезки на ленте .
Вы можете обрезать фигуру по Word, PowerPoint или Excel.
Обрезка до указанной фигуры
Чтобы быстро изменить форму рисунка, можно обрезать его до определенной фигуры. При этом рисунок автоматически изменяется для заполнения фигуры при сохранении пропорций.
При этом рисунок автоматически изменяется для заполнения фигуры при сохранении пропорций.
Если один и тот же рисунок необходимо использовать в разных фигурах, создайте его копии и обрежьте по отдельности каждый рисунок до требуемой фигуры.
-
Чтобы добавить рисунок в файл Office (например, документ Word, презентацию PowerPoint или книгу Excel), на вкладке Вставка нажмите кнопку Рисунки.
-
Выделите в файле рисунок, который нужно обрезать.
-
На вкладке Формат рисунка щелкните стрелку рядом с кнопкой Обрезать.
(Если вкладка Формат рисунка не отображается, убедитесь, что вы выбрали рисунок, а не фигуру).
-
Наведите указатель мыши на элемент Обрезать по фигуре и выберите фигуру, по которой нужно выполнить обрезку.
Эта фигура будет сразу применена к рисунку.
-
Если вы хотите изменить ее форму, на ленте нажмите кнопку Обрезать еще раз.
На краях и в углах рисунка появятся черные маркеры обрезки.
-
Обрезка изображения путем перетаскиванием любого из них внутрь. При перетаскивания одного из угловых хладок он обрегает сразу две смежные стороны.
Обрезка для размещения в фигуре или для ее заполнения
После того как вы добавите рисунок в фигуру, вы можете настроить его с помощью инструментов Вписать и Заливка.
-
Выберите рисунок, который должен быть внутри фигуры.
-
На вкладке Формат рисунка щелкните стрелку рядом с кнопкой Обрезать.
(Если вкладка Формат рисунка не отображается, убедитесь, что вы выбрали рисунок, а не фигуру).
-
Выберите команду Заливка или Вписать, а затем щелкните за пределами рисунка.
Параметр
Описание
Заливка
Удаляет (или «обводка») часть рисунка, но по-прежнему заполняет всю фигуру.
Вписать
Помещает в фигуру весь рисунок. Исходные пропорции рисунка сохранятся, но в фигуре может быть пустое место.

Обрезка до указанной фигуры
Чтобы быстро изменить форму рисунка, можно обрезать его до определенной фигуры. При этом изображение автоматически усекается в соответствии с формой выбранной фигуры. Пропорции рисунка сохраняются.
Пропорции рисунка сохраняются.
-
Выберите рисунок, который вы хотите обрезать по форме определенной фигуры.
-
Откройте вкладку Формат рисунка.
(Если вкладка Формат рисунка не отображается, убедитесь в том, что вы выбрали рисунок, а не фигуру).
-
В разделе Коррекция щелкните стрелку рядом с командой Обрезка, выберите пункт Маска к фигуре, выберите тип фигуры и щелкните фигуру, до которой требуется обрезать изображение.
Эта фигура будет сразу применена к рисунку.
-
Если вы хотите изменить ее форму, на ленте нажмите кнопку Обрезать еще раз.
На краях и в углах рисунка появятся черные маркеры обрезки.
-
Перетащите маркеры обрезки, если требуется обрезать поля рисунка, и щелкните мышью за пределами рисунка.
-
Щелкните любое место за пределами рисунка.

Обрезка для размещения в фигуре или для ее заполнения
После того как вы добавите рисунок в фигуру, вы можете настроить его с помощью инструментов Обрезка по размеру и Заливка.
-
Выберите рисунок, который необходимо разместить в фигуре.
-
Откройте вкладку Формат рисунка.
(Если вкладка Формат рисунка не отображается, убедитесь в том, что вы выбрали рисунок).
-
В области Настройкащелкните стрелку рядом с кнопкой Обрезка ,выберите обрезка по заполняемой или Вписать ,а затем щелкните за пределами рисунка:
Параметр
Описание
Обрезка по заливки
Удаляет (или «обводка») часть рисунка, но по-прежнему заполняет всю фигуру.
Обрезка по размеру
Помещает в фигуру весь рисунок. Исходные пропорции рисунка сохранятся, но в фигуре может быть пустое место.
-
По завершении нажмите клавишу ESC.

Вписать рисунок внутри фигуры
Word в Интернете и PowerPoint в Интернете есть быстрые параметры в стиле рисунка, которые можно применить к рисунку предопределяемую фигуру. Доступны три овала и несколько прямоугольников.
Доступны три овала и несколько прямоугольников.
Таким образом, хотя в этих приложениях нет функции обрезки по фигуре, которая есть в классических приложениях, вы все равно можете применить к рисунку эти основные фигуры, как описано ниже.
-
Вставьте изображение в документ. (Выберите Вставить > рисунок и перейдите к нужному рисунку.)
-
Выбрав изображение на холсте, откройте вкладку Рисунок на ленте и откройте галерею Стили рисунков.
-
Выберите фигуру, чтобы применить ее к рисунку.
-
После того как фигура будет применена, вы можете при необходимости отобразить ее размер.
Итоговый тест за курс 7 класса
Информация об итоговом тесте за курс 7 класса по математике
Общее время – 90 минут.
Характеристика работы
Всего в работе 26 заданий, из которых 20 заданий базового уровня (часть 1), 4 задания повышенного уровня (часть 2) и 2 задания высокого уровня сложности (часть 2). Работа состоит из трёх модулей: «Алгебра», «Геометрия», «Реальная математика».
Модуль «Алгебра» содержит 13 заданий: в части 1 — десять заданий; в части 2 — три задания.
Модуль «Геометрия» содержит восемь заданий: в части 1 — пять заданий; в части 2 — три задания.
Модуль «Реальная математика» содержит пять заданий: все задания — в части 1.
Советы и указания по выполнению работы
Сначала выполняйте задания части 1. Начать советую с того модуля, задания которого вызывают у Вас меньше затруднений, затем переходите к другим модулям. Для экономии времени пропускайте задание, которое не удаётся выполнить сразу, и переходите к следующему. Если у Вас останется время, Вы сможете вернуться к пропущенным заданиям.
Все необходимые вычисления, преобразования и т.д. выполняйте в черновике. Записи в черновике не учитываются при оценивании работы. Рекомендую внимательно читать условие и проводить проверку полученного ответа.
Ответы к заданиям 1, 3, 5, 6, 10, 16, 17 записываются в виде одной цифры, которая соответствует номеру правильного ответа.
Для остальных заданий части 1
ответом является число или последовательность цифр, которые нужно записать в
ответе в тексте работы. Если в ответе получена обыкновенная дробь, обратите её
в десятичную. В случае записи неверного ответа на задания части 1 зачеркните
его и запишите рядом новый.
Решения заданий части 2 и ответы к ним пишите разборчиво с полным оформлением задачи. Задания можно выполнять в любом порядке, начиная с любого модуля. Текст задания переписывать не надо, необходимо только указать его номер. При выполнении работы Вы можете воспользоваться справочными материалами.
Как оценивается работа
Баллы, полученные Вами за верно выполненные задания, суммируются.
Для успешного написания итогового теста необходимо набрать в сумме не менее 8 баллов, из них: не менее 3 баллов по модулю «Алгебра», не менее 2 баллов по модулю «Геометрия» и не менее 2 баллов по модулю «Реальная математика». За каждое правильно выполненное задание части 1 выставляется 1 балл. В каждом модуле части 2 задания расположены по нарастанию сложности и оцениваются в 2, 3 и 4 балла.
0 – 7 баллов «2»,
8 – 15 баллов «3»,
16 – 22 баллов «4»,
23 – 38 баллов «5»
Желаю успеха!
Итоговый тест за курс 7 класса
Вариант I
Часть I
Модуль «Алгебра»
1. Расположите в порядке возрастания числа: , ,
0,8
Расположите в порядке возрастания числа: , ,
0,8
1) ; ; 0,8 2) ; ; 0,8 3) 0,8; ; 4) ; 0,8;
2. Найдите значение выражения при а = 2,4, в = -0,9, с = 0,7. Ответ: ________
3. В каком случае знак неравенства поставлен неверно?
1) (-10)12 ∙ (-5)10 > 0 2) (-7)14 ∙ (-2)23 < 0 3) (-3)15 ∙ (-8)11 > 0 4) (-4)19 ∙ (-3)20 > 0
4. Найдите неизвестный член пропорции = . Ответ:________
5. Решите уравнение 2х – 7 = 10 – 3(х + 2).
1) -0,6 2) 2,2 3) 4) 4,6
6.
Прочитайте задачу: «От турбазы до автостанции турист доехал на велосипеде за 2
ч. Чтобы пройти это расстояние пешком, ему понадобилось бы 6 ч. Известно, что
идет он со скоростью, на 4 км/ч меньшей, чем едет на велосипеде. С какой
скоростью идет турист?»
С какой
скоростью идет турист?»
Выберите уравнение, соответствующее условию задачи, если буквой х обозначена скорость (в км/ч) с которой идет турист.
1) 6х = 2(х – 4) 2) 2х = 6(х – 4) 3) 6х = 2(х + 4) 4) – = 4.
7. Вынесите за скобки общий множитель 3х2у – 12х3 Ответ:________
8. Для каждого выражения из верхней строки укажите равное ему выражение из нижней строки.
А) (а2)3а2 Б) (а2а3)2 В) 1) а12 2) а10 3) а8 4) а7
Ответ:
9.Упрастите выражение в (в + 2с) – (в + с)2. Ответ:_______
10. Каким условием можно задать множество точек координатной плоскости, изображенной на рисунке? 1) х ≤ 3 2) у ≥ 3 3) у ≤ 3 4) х ≥ 3
|
|
| у |
|
|
|
|
|
|
|
|
| 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0 |
| 1 |
|
|
| |
|
|
|
|
|
|
|
|
|
|
Модуль «Геометрия»
11. В равнобедренном треугольнике угол при вершине, противолежащий основанию, равен
580. Найдите угол при основании. Ответ дайте в градусах.
В равнобедренном треугольнике угол при вершине, противолежащий основанию, равен
580. Найдите угол при основании. Ответ дайте в градусах.
Ответ:____________
12. Точки В делит отрезок АС на два отрезка. Найдите длину отрезка ВС, если АВ = 3,7 см, АС = 7,2 см.
Ответ:___________
13.В равнобедренном треугольнике основание в два раза меньше боковой стороны, а периметр равен 50 см. Найдите стороны треугольника
14. В прямоугольном треугольнике АВС угол А равен 300, а гипотенуза АВ = 16 см. Найдите катет ВС.
Ответ:________
15. Укажите номера верных утверждений
1) Если угол равен 600, то смежный с ним угол равен 1200 .
2) Каждая сторона треугольника меньше разности двух других сторон .
3) Если две параллельные прямые пересечены третьей прямой, то сумма внутренних односторонних углов равна 900.
4)
Внешний угол треугольника равен сумме двух других углов не смежных с ним.
Ответ:______
Модуль «Реальная Математика»
16. При покупке соковыжималки стоимостью 4000 р. покупатель предъявил дисконтную карту, дающую право на 3,5% скидки. Сколько он заплатил за соковыжималку?
1) 3860 р. 2) 140 р. 3) 1400 р. 4) 3996,5 р.
17. Сколькими способами можно построить в ряд четырех спортсменов?
1) 8 2) 12 3) 16 4) 24
18. На рисунке показано, как менялась температура воздуха на протяжении одних суток. По горизонтали указано время суток, по вертикали – значение температуры в градусах Цельсия. Найдите разность между наибольшим и наименьшим значением температуры. Ответ дайте в градусах Цельсия.
Т0 С |
|
|
|
|
|
|
|
| |
7 |
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
| |
0 | 3 | 6 | 9 | 12 | 15 | 18 | 21 | 24 | t,ч |
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ответ:_________
19. Средняя норма потребляемой воды в классе, в котором учится Игорь, среди
мальчиков составляет 2,5 л. Игорь выпивает в день 2,3 л воды. Какое из
следующих утверждений верно?
Средняя норма потребляемой воды в классе, в котором учится Игорь, среди
мальчиков составляет 2,5 л. Игорь выпивает в день 2,3 л воды. Какое из
следующих утверждений верно?
1) Обязательно найдется мальчик в классе, который выпивает 2,6 л в день.
2)Все мальчики, кроме Игоря, выпивают в день по 2,5 л воды.
3) Обязательно найдется мальчик в классе, который пьет больше, чем 2,5 л в день.
4) Обязательно найдется мальчик в классе, который выпивает ровно 2,5 л в день.
20. Высота h (в м), на которой через t с окажется тело, брошенное вертикально вверх с начальной скоростью v м/с, можно вычислить по формуле h = vt – . На какой высоте (в метрах) окажется за 4 с мяч, подброшенный ногой вверх, если его начальная скорость равна 33 м/с? Возьмите значение g = 10 м/с.
Часть II
При
выполнении заданий части II, записывайте его решение и ответ. Пишите
четко и разборчиво.
Модуль «Алгебра»
21. Разложите на множители: 16х2 – 24ху + 9у2 – 4х + 3у
22. При каких значениях х выполняется равенство 2х ∙ 2 3 = 64.
23. Из туристического лагеря к станции вышел пешеход со скоростью 4 км/ч. Через час вслед за ним выехал велосипедист со скоростью 10 км/ч. Он приехал на станцию на 0,5 ч раньше пешехода. Определите расстояние от туристического лагеря до станции?
Модуль «Геометрия»
24. Три точки K, L, M лежат на одной прямой, KL = 6 см, LM = 10 см. Каким может быть расстояние КМ? Для каждого из возможных случаев сделайте чертеж.
25. Докажите, что медианы, проведенные к боковым сторонам равнобедренного треугольника, равны.
26. Прямые,
содержащие биссектрисы внешних углов при вершинах А и С треугольника АВС,
пересекаются в точке О. Найдите угол АОС, если угол В равен β.
Итоговый тест за курс 7 класса
Вариант II
Часть I
Модуль «Алгебра»
1. Расположите в порядке возрастания числа: 0,4; , .
1) 0,4; , 2) ; ; 0,4 3) ; 0,4; 4) ; 0,4;
2. Найдите значение выражения при а = 8,4, в = -1,2, с = — 4,5. Ответ: ________
3. В каком случае знак неравенства поставлен неверно?
1) (-3)15 ∙ (-8)11 > 0 2) (-6)16 ∙ (-9)28 > 0 3) (-4)19 ∙ (-3)20 > 0 4) (-7)14 ∙ (-2)23 < 0
4. Найдите неизвестный член пропорции = .
Ответ:________
Найдите неизвестный член пропорции = .
Ответ:________
5. Решите уравнение – = 1.
1) -0,5 2) — 4,5 3) 4) 4,5
6. Прочитайте задачу: «Мастер и ученик вместе изготовили 42 деревянные ложки. Мастер работал 6 ч, а ученик 4 ч, причем ученик изготавливал за час на 3 ложки меньше, чем мастер. Сколько ложек за час изготавливал мастер»
Какое уравнение соответствующее условию задачи, если буквой х обозначено число ложек, которые за час изготавливал мастер?
1) 6х + 4(х – 3) = 42 2) 6х + 4∙ = 42 3) 6(х – 3) + 4х = 42 4) + = 42.
7. Разложите на множители в2 – 36а2 Ответ:________
8. Для каждого выражения из верхней строки укажите равное ему выражение из нижней строки.
А) Б) (b4 b3)2 В) b4(b3)2 1) b14 2) b12 3) b10 4) b9
Ответ:
9. Упростите выражение 5а (а – 4) – 8а (а – 6).
Ответ:_______
Упростите выражение 5а (а – 4) – 8а (а – 6).
Ответ:_______
10. Каким условием можно задать множество точек координатной плоскости, изображенной на рисунке? 1) х ≥ 1 2) 1 ≤ х ≤ 4 3) 1 ≤ у ≤ 4 4) у ≤ 4
|
|
| у |
|
|
|
|
|
|
|
|
| 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0 |
| 1 |
|
| 4 | х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модуль «Геометрия»
11. В равнобедренном треугольнике угол при основании равен 460. Найдите
угол при вершине. Ответ дайте в градусах.
В равнобедренном треугольнике угол при основании равен 460. Найдите
угол при вершине. Ответ дайте в градусах.
Ответ:____________
12. Точки В делит отрезок АС на два отрезка. Найдите длину отрезка АС, если АВ = 7,8 см, ВС = 2,5 см.
Ответ:___________
13.На окружности с центром О отмечены точки А и В так, что хорда АВ равна радиусу окружности. Найдите углы треугольника АОВ.
Ответ:_________
14. В прямоугольном треугольнике АВС угол В равен 600, а катет ВС = 12 см. Найдите гипотенузу АВ.
Ответ:________
15. Укажите номера верных утверждений
1) Если две прямые перпендикулярны третьей прямой, то эти прямые перпендикулярны.
2) Если две стороны и угол одного треугольника соответственно равны двум сторонам и углу другого треугольника, то такие треугольники равны.
3) Если две параллельные прямые пересечены третьей прямой, то сумма внутренних односторонних углов равна 1800.
4)
В треугольнике против большей стороны лежит больший угол.
Ответ:______
Модуль «Реальная Математика»
16. Клиент банка открыл счет на 6000 р., годовой доход по которому составляет 5,5%. Какая сумма будет на счете через год?
1) 330 р. 2) 3300 р. 3) 6330 р. 4) 6005,5 р.
17. Сколько двузначных чисел можно составить, используя цифры 0, 1, 2, 3 ?
1) 8 2) 12 3) 16 4) 24
18. На рисунке показано, как менялась температура воздуха на протяжении одних суток. По горизонтали указано время суток, по вертикали – значение температуры в градусах Цельсия. Найдите разность между наибольшим и наименьшим значением температуры. Ответ дайте в градусах Цельсия.
Т0 С |
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
| |
5 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
| |
0 | 3 | 6 | 9 | 12 | 15 | 18 | 21 | 24 | t,ч |
-2 |
|
|
|
|
|
|
|
|
|
Ответ:_________
19. В среднем каждый ученик класса, в котором учится Сережа, тратит на дорогу до
школы 36 минут. Сережа тратит на дорогу 10 минут. Какое из следующих
утверждений верно?
В среднем каждый ученик класса, в котором учится Сережа, тратит на дорогу до
школы 36 минут. Сережа тратит на дорогу 10 минут. Какое из следующих
утверждений верно?
1) Обязательно найдется ученик класса, который тратит на дорогу более 40 минут.
2) Обязательно найдется ученик класса, который тратит на дорогу ровно 36 минут.
3) В классе каждый ученик, кроме, Сережи, который тратит на дорогу более 36 минут.
4) Обязательно найдется ученик класса, который тратит на дорогу более 36 минут.
20. Высота h (в м), на которой через t с окажется тело, брошенное вертикально вверх с начальной скоростью v м/с, можно вычислить по формуле h = vt – . На какой высоте (в метрах) окажется за 2 с мяч, подброшенный ногой вверх, если его начальная скорость равна 24 м/с? Возьмите значение g = 10 м/с.
Часть II
При
выполнении заданий части II, записывайте его решение и ответ. Пишите
четко и разборчиво.
Модуль «Алгебра»
21. Разложите на множители: 4х2 – 20ху + 25у2 + 5у – 2х
22. При каких значениях х выполняется равенство 2х + 4 = 64.
23. Из поселка в город одновременно выехали мотоциклист со скоростью 40 км/ч и велосипедист со скоростью 10 км/ч. Определите, какое время затратил на путь велосипедист, если известно, что он прибыл в город на 1,5 ч позже мотоциклиста.
Модуль «Геометрия»
24. Три точки В, D и M лежат на одной прямой. Известно, что BD = 7 см, MD = 16 см. Каким может быть расстояние ВМ? Для каждого из возможных случаев сделайте чертеж
25. Докажите, что биссектрисы, проведенные из вершин основания равнобедренного треугольника, равны.
26. Прямые, содержащие биссектрисы внешних углов при вершинах В и С треугольника АВС, пересекаются в точке О. Найдите угол ВОС, если угол А равен α.
Итоговый тест за 7 класс
Ответы часть I
Модуль | «Алгебра» | |||||||||
Номер задания | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
Вариант I | 2 | -1,5 | 4 | 1,5 | 2 | 3 | 3х2(у – 4х) | 324 | —с2 | 3 |
Вариант II
| 4 | -1,6 | 3 | 1,8 | 2 | 1 | (в – 6а)(в + 6а) | 213 | -3а2 + 28а | 2 |
Модуль | «Геометрия» | «Реальная математика» | ||||||||
Номер задания | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
Вариант I | 61 | 3,5 | 10, 20, 20 | 8 | 14 | 1 | 4 | 9 | 3 | 52 |
Вариант II | 88 | 10,3 | 600, 600, 600 | 24 | 34 | 3 | 2 | 6 | 4 | 28 |
Ответы часть II
| Модуль «Алгебра» | Модуль «Геометрия» | ||||
| 21 | 22 | 23 | 24 | 25 | 26 |
Вариант I | (4х – 3у)(4х – 3у – 1) | 3 | 10 км | 16 см или 4 см |
| 900 – |
Вариант II | (2х – 5у)(2х – 5у – 1) | 2 | 2 ч | 23 см или 9 см |
| 900 – |
Литература:
1. Алгебра. 7 : Учебник для общеобразовательных учреждений/ Г.В.Дорофеев,
С.Б.Суворова, Е.А.Бунимович и др; под редакцией Г.В.Дорофеева; Российская
академия наук. – 6-е издание. – М. : Просвещение, 2010 г
Алгебра. 7 : Учебник для общеобразовательных учреждений/ Г.В.Дорофеев,
С.Б.Суворова, Е.А.Бунимович и др; под редакцией Г.В.Дорофеева; Российская
академия наук. – 6-е издание. – М. : Просвещение, 2010 г
2.Геометрия, 7-9; Учебник для общеобразовательных учреждений/ Л.С. Атанасян, В.Ф.Бутузов, С.Б.Кадомцев и др. – 12-е издание. – М. : Просвещение, 2002 г
3. Алгебра. Тематические тесты. 7 класс/ Л.В.Кузнецова, С.С.Минаева, Л.О.Рослова и др. Российская академия наук. – М. : Просвещение, 2009 г
4. Государственная итоговая аттестация выпускников 9 классов в новой форме. Математика 2014. Учебное пособие./ А.В.Семенов, А.С.Трепалин, И.В.Ященко, П.И.Захаров; под ред. И.В.Ященко; Московский центр непрерывного математического образования. – М.: Интеллект-Центр, 2014.
Ресурсы интернет сайта. Egeigia.ru . Информация об экзаменационной работе
Скачано с www.znanio.ru
Глава 5 Базовая графика | Визуализация и анализ географических данных на языке R
Данный модуль посвящен введению в работу с графическим представлением информации в R. 3\)):
3\)):
Стандартные графики
Графики (точечные и линейные) – базовый и наиболее часто используемый способ визуализации. Универсальная функция plot() позволяет строить графики по координатам \(X\) и \(Y\), которые передаются, соответственно, в первый и второй аргумент. Если переменные \(X\) и \(Y\) не связаны друг с другом явным образом, то такой график называется диаграммой рассеяния.
Диаграммы рассеяния
Диаграмма рассеяния позволяет установить, есть ли зависимость между переменными, а также понять, как объекты дифференцируются по значениям переменных.
par(mar=c(4,4,3,2))
# Диаграмма рассеяния по экспорту и импорту:
plot(sub$МетЭкспорт,
sub$МетИмпорт,
col="red",
xlab="Экспорт, млн. долл. США",
ylab = "Импорт, млн. долл. США",
main = "Экспорт/импорт металлов и изделий из них по субъектам РФ")В данном случае четко выделяется группа субъектов вблизи начала координат, не отличающихся интенсивным экспортом и импортом продукции металлургии, а также очевидно преобладание экспорта над импортом при больших объемах товарооборота.
При построении диаграмм рассеяния важно сохранить одинаковый масштаб по осям \(X\) и \(Y\). Чтобы обеспечить это условие, необходимо использовать параметр asp = 1:
plot(sub$МетЭкспорт,
sub$МетИмпорт,
col="red",
xlab="Экспорт, млн. долл. США",
ylab = "Импорт, млн. долл. США",
main = "Экспорт/импорт металлов и изделий из них по субъектам РФ",
asp = 1)Попробуйте изменить размер окна на вкладке Plots. Вы увидите, что масштаб по осям сохраняется пропорциональным.
Размер и тип значка можно изменить, используя параметры pch = и cex =. Размеры масштабируются параметром cex относительно условной единицы — стандартного размер значка. Сам значок можно выбрать, используя его код в соответствии с нижеприведенным рисунком (на самом деле, вы можете выбирать произвольные символы для визуализации точек):
Типы символов R
plot(sub$МетЭкспорт,
sub$МетИмпорт,
col="red",
xlab="Экспорт, млн. долл. США",
ylab = "Импорт, млн. долл. США",
main = "Экспорт/импорт металлов и изделий из них по субъектам РФ",
asp = 1,
pch = 2,
cex = 0.5) долл. США",
ylab = "Импорт, млн. долл. США",
main = "Экспорт/импорт металлов и изделий из них по субъектам РФ",
asp = 1,
pch = 2,
cex = 0.5)
долл. США",
ylab = "Импорт, млн. долл. США",
main = "Экспорт/импорт металлов и изделий из них по субъектам РФ",
asp = 1,
pch = 2,
cex = 0.5)
plot(sub$МетЭкспорт,
sub$МетИмпорт,
col="red",
xlab="Экспорт, млн. долл. США",
ylab = "Импорт, млн. долл. США",
main = "Экспорт/импорт металлов и изделий из них по субъектам РФ",
asp = 1,
pch = 20,
cex = 1.2)Линейные графики
Линейные графики отражают связь между зависимой и независимой переменной. Существует два способа нанесения линий на график: явное рисование линий поверх уже построенного графика с помощью функции lines(), или создание нового линейного графика с помощью функции plot() с дополнительным параметром type =.
Для иллюстрации принципов работы первого способа откроем еще раз данные по объему сброса загрязненных сточных вод по морям России (млрд куб. м):
м):
tab = read.csv2("data/oxr_vod.csv", encoding = 'UTF-8')
plot(tab$Год, tab$Каспийское, pch=20) # для начала нанесем точки
lines(tab$Год, tab$Каспийское) # теперь нанесем линииПо умолчанию функция plot() рисует именно точки. Однако если точки не нужны, а достаточно только линий, или требуется иной подход к построению графиков, можно задать параметр type =, который принимает следующие значения:
-
"p"for points, -
"l"for lines, -
"b"for both, -
"c"for the lines part alone of “b”, -
"o"for both ‘overplotted’, -
"h"for ‘histogram’ like (or ‘high-density’) vertical lines, -
"s"for stair steps, -
"S"for other steps, see ‘Details’ below, -
"n"for no plotting.
Попробуем разные методы визуализации:
plot(tab$Год, tab$Карское,pch=20)
plot(tab$Год, tab$Каспийское, type="p")
plot(tab$Год, tab$Каспийское, type="l")
plot(tab$Год, tab$Каспийское, type="b")
plot(tab$Год, tab$Каспийское, type="c")
plot(tab$Год, tab$Каспийское, type="o")
plot(tab$Год, tab$Каспийское, type="h")
plot(tab$Год, tab$Каспийское, type="s")Толщину и тип линии можно изменить, используя параметры lwd = и lty = соответственно. Работают они аналогично параметрам pch и cex для точечных символов. Типов линий по умолчанию в стандартной библиотеке R не так много, но в сочетании с цветовым кодированием и толщиной их оказывается вполне достаточно:
Работают они аналогично параметрам pch и cex для точечных символов. Типов линий по умолчанию в стандартной библиотеке R не так много, но в сочетании с цветовым кодированием и толщиной их оказывается вполне достаточно:
Попробуем разные варианты представления линий:
plot(tab$Год, tab$Каспийское, type="l", lwd = 2, lty = 1)
plot(tab$Год, tab$Каспийское, type="l", lwd = 3, lty = 2)
plot(tab$Год, tab$Каспийское, type="l", lwd = 1, lty = 3)Совмещение графиков
Часто бывает необходимо совместить на одном графике несколько рядов данных. Для этого можно поступить двумя путями:
Нарисовать один ряд данных c помощью функции
plot(), а затем добавить к нему другие ряды с помощью функцийpoints()иlines().Нарисовать пустой график, а затем добавить к нему все ряды данных с помощью функций
points()иlines().

При совмещении нескольких рядов данных на одном графике в первом же вызове функции
plot()необходимо заложить диапазон значений по осям \(X\) и \(Y\), охватывающий все ряды данных. В противном случае будет учтен только разброс значений первого ряда данных, и остальные ряды могут не поместиться в поле графика.
Вариант №1 реализуется следующим образом:
plot(tab$Год,
tab$Каспийское,
pch=20,
type="o",
ylim = c(0,12),
col="red3")
# Добавим теперь на существующий график новый ряд данных, используя функции points() и lines():
points(tab$Год, tab$Карское, pch=20, col="forestgreen")
lines(tab$Год, tab$Карское, pch=20, col="forestgreen")Обратите внимание на то, что если бы мы вызвали еще одну инструкцию
plot()с новым рядом данных, это привело бы к построению нового графика, а не к добавлению его на существующий.
Теперь рассмотрим второй вариант. Заодно устраним недостаток предыдущего кода, в котором диапазон значений по оси \(Y\) указывался вручную.
Заодно устраним недостаток предыдущего кода, в котором диапазон значений по оси \(Y\) указывался вручную.
xrange = range(tab$Год) # вычислим диапазон по оси X
yrange = range(tab$Каспийское, tab$Карское, tab$Азовское) # вычислим диапазон по оси Y
# Построим пустой график, охватывающий полный диапазон данных, и имеющий все необходимые сопроводительные элементы
plot(xrange,
yrange,
main="Объем сброса загрязненных сточных вод",
xlab="Год",
ylab="млрд.куб.м",
type = "n") # n означает, что ряд данных рисоваться не будет
# Теперь добавим на график ряды данных
points(tab$Год, tab$Каспийское, pch=20, col="red3")
lines(tab$Год, tab$Каспийское, pch=20, col="red3")
points(tab$Год, tab$Карское, pch=20, col="forestgreen")
lines(tab$Год, tab$Карское, pch=20, col="forestgreen")
points(tab$Год, tab$Азовское, pch=20, col="steelblue")
lines(tab$Год, tab$Азовское, pch=20, col="steelblue")Функциональные параметры
Графические параметры при построении графиков на самом деле могут быть не константами, а функцией данных. Например, вы можете сказать, что размер точки при построении диаграммы рассеяния должен быть функцией отношения экспорта к импорту, что усилит наглядность отображения:
Например, вы можете сказать, что размер точки при построении диаграммы рассеяния должен быть функцией отношения экспорта к импорту, что усилит наглядность отображения:
plot(okr$МетЭкспорт,
okr$МетИмпорт,
col=rgb(1,0,0,0.5),
xlab="Экспорт, млн. долл. США",
ylab = "Импорт, млн. долл. США",
main = "Экспорт/импорт металлов и изделий из них по ФО РФ (2013 г.)",
asp = 1,
pch = 20,
cex = 2+log(sub$МетИмпорт/sub$МетЭкспорт)) # размер кружка зависит от соотношения импорта и экспортаГистограммы
Гистограммы распределения строятся с помощью функции hist(). Чтобы изменить ширину кармана (столбца) гистограммы, необходимо задать параметр breaks =, а цвет задается в параметре col:
hist(sub$ПродЭкспорт)
# Карманы будут от 0 до 3000 через 100. Заодно добавим цвет:
hist(sub$ПродЭкспорт, breaks = seq(0,3000,100), col="olivedrab3")При построении гистограммы (как и любого другого типа графика) вы можете использовать не весь массив данных, а только его подмножество Например, можно посмотреть гистограмму только для субъектов с объемом экспорта менее 300:
hist(sub$ПродЭкспорт[sub$ПродЭкспорт < 300], col = "olivedrab3", breaks = seq(0, 300, 20))Наконец, вы можете осуществить преобразование ряда данных перед построением гистограммы. Например, взять логарифм, чтобы проверить,похоже ли распределение на логнормальное:
Например, взять логарифм, чтобы проверить,похоже ли распределение на логнормальное:
hist(log(sub$ПродЭкспорт), col = "olivedrab3")Столбчатые графики
Столбчатые графики — barplot — отображают вектор числовых данных в виде столбиков. Это простейший вид графика (наряду с dotchart), который используется для сравнения абсолютных величин. Для построения необходимо вызвать функцию barplot() и передать ей столбец таблицы:
# Или даже просто вектор натуральных чисел от -5 до 5:
barplot(-5:5)
# Если у каждого столбика есть название,
# нужно передать вектор названий в аргумент names.arg =
barplot(okr$ХимЭкспорт, names.arg = okr$Регион)
# при наличии длинных подписей удобнее столбчатую диаграмму разместить горизонтально, используя параметр horiz = TRUE.
barplot(okr$ХимЭкспорт, names.arg = okr$Регион, horiz=TRUE)Чтобы развернуть подписи перпендикулярно столбцам, следует использовать параметр las =. Справка__R__говорит нам о том, что этот параметр дает следующее поведение подписей:
Справка__R__говорит нам о том, что этот параметр дает следующее поведение подписей:
- 0: всегда параллельно осям (по умолчанию),
- 1: всегда горизонтально,
- 2: всегда перпендикулярно осям,
- 3: всегда вертикально.
Выберем вариант, при котором подписи всегда горизонтальны:
barplot(okr$ХимЭкспорт, names.arg = okr$Регион, horiz=TRUE, las = 1)В данном случае очень массивные названия федеральных не умещаются в пространство графика. Можно было бы вполне убрать словосочетание “федеральный округ”. Для этого используем уже знакомую нам sub().
names = sub("федеральный округ", "", okr$Регион) # "" - означает пустая строка
barplot(okr$ХимЭкспорт, names.arg = names, horiz = TRUE, las = 1)И снова содержимое не поместилось в поле графика. Проблема в том, что вокруг любого графика резервируются поля ограниченного размера для размещения подписей координат и т.д. Автоматически эти поля не пересчитываются, зарезервировать их — ваша задача.
Наберите в консоли ?par. Откроется список всевозможных графических параметров, которые управляют компоновкой и порядком построения графиков. Эти параметры можно установить, вызвав функцию par(). Все дальнейшие вызовы инструкций построения графиков будут учитывать установленные параметры Пролистайте страницу справки вниз и найдите параметр mar = — он отвечает за установку полей в условных единицах. Есть также параметр mai =, который позволяет установить поля графика в дюймах. Обратите внимание на то, что означают параметры этой функции:
# mar=c(bottom, left, top, right)
# The default is c(5, 4, 4, 2) + 0.1.Поскольку в нашем примере проблемы возникают в левым полем, необходимо увеличить второй параметр.
margins.default = par("mar") # запишем текущее значение, чтобы восстановить его потом
par(mar = c(5, 10, 4, 2)) # увеличим поле left до 10 условных единиц
barplot(okr$ХимЭкспорт, names. arg = names, horiz=TRUE, las = 1) arg = names, horiz=TRUE, las = 1)
arg = names, horiz=TRUE, las = 1)Добавим заголовок с помощью параметра main =, а подпись единиц измерения по оси \(X\) — с помощью параметра xlab =. Поскольку количество параметров функции уже достаточно велико, введем каждый из них с новой строчки, чтобы улучшить читаемость кода:
barplot(okr$ХимЭкспорт,
names.arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz = TRUE,
las = 1)
# Чтобы увеличить диапазон оси X, можно использовать параметр xlim = c(min, max):
barplot(okr$ХимЭкспорт,
names.arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz = TRUE,
las = 1,
xlim = c(0,12000))Работа с цветом на столбчатых диаграммах рассмотрена ниже в отдельном разделе.
Круговые (секторные) диаграммы
Круговые диаграммы (англ. piechart) строятся с помощью функции
piechart) строятся с помощью функции pie():
par(mar = c(5, 5, 5, 5)) # установим поля
pie(okr$ХимЭкспорт)
# вместо номеров можно использовать подписи секторов, добавив второй параметр:
pie(okr$ХимЭкспорт, names)
# в каждую метку можно добавить процент данного округа в общей массе. Для этого его нужно сначала посчитать:
percentage = 100 * okr$ХимЭкспорт / sum(okr$ХимЭкспорт)
# и округлить до 1 знака после запятой:
percentage = round(percentage, digits = 1)Можно присоединить проценты к названиям округов, добавив обрамляющие скобки. Чтобы функция paste не добавляя пробелы между присоединяемыми строками, необходимо задать параметр sep = , передав ему пустую строку — ““:
names2=paste(names, " (", percentage, "%)", sep = "")
# Используем для аннотирования круговых секторов:
pie(okr$ХимЭкспорт, names2)
# Добавить заголовок можно также с помощью параметра main =
pie(okr$ХимЭкспорт, names2, main = "Доля федеральных округов в экспорте продукции химической промышленности")Чтобы перенести часть заголовка на вторую строку, вы можете использовать управляющий символ перевода строки \n, вставив его в требуемое место:
pie(okr$ХимЭкспорт, names2, main = "Доля федеральных округов в экспорте \n продукции химической промышленности")Управляющие символы играют большое значение в программировании и используются для управления поведением текстового вывода.
\nназывается escape-последовательностью. Помимо перевода строки, есть и другие полезные управляющие символы. Кстати, именно из-за того, что escape-последовательности начинаются с обратной косой черты (\), при указании системных путей в функцииsetwd()всегда следует использовать прямую косую черту (/). Например, следующий путь не будет найдет, поскольку он содержит управляющие последовательности\nи\t:C:\data\tables\new.
 Нотация
Нотация Наконец, при использовании секторных диаграмм важно уметь менять порядок секторов. По умолчанию сектора откладываются против часовой стрелки начиная с восточного направления. Чтобы сектора откладывались по часовой стрелке с северного направления, следует задать параметр clockwise = TRUE.
pie(okr$ХимЭкспорт,
names2,
main = "Доля федеральных округов в экспорте \n продукции химической промышленности",
clockwise = TRUE)Работа с цветом на круговых диаграммах рассмотрена ниже в отдельном разделе.
Цвет и прозрачность
Цвет — одно из основных графических средств, используемых на графиках и диаграммах, поэтому данная тема рассмотрена более подробно в отдельном разделе. Определить цвет можно различными способами. Во-первых, в R есть палитра предопределенных цветов, которые можно выбирать по их названию).
Список названий цветов можно посмотреть, вызвав функцию colors():
head(colors())
## [1] "white" "aliceblue" "antiquewhite" "antiquewhite1"
## [5] "antiquewhite2" "antiquewhite3"Основной цвет любого графика или диаграмма задается параметром col =. Это цвет (или цвета) с помощью которых будут отображаться данные. Попробуем изменить цвет графика с серого на пастельно-синий:
par(mar = c(5, 10, 4, 2)) # увеличим поле left до 10 условных единиц
barplot(okr$ХимЭкспорт,
names.arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz = TRUE,
las = 1,
xlim = c(0,12000),
col = "steelblue") США",
horiz = TRUE,
las = 1,
xlim = c(0,12000),
col = "steelblue")
США",
horiz = TRUE,
las = 1,
xlim = c(0,12000),
col = "steelblue") Помимо этого вы можете задать цвет с помощью цветовых компонент в различных пространствах. Для этого вы должны быть знакомы с основами теории цвета (посмотрите презентацию UsingColorInR.pdf. Например, фиолетовый цвет в пространстве RGB можно задать с помощью функции rgb(), смешав синюю и красную компоненты:
violet = rgb(0.4, 0, 0.6)
barplot(okr$ХимЭкспорт,
names.arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz = TRUE,
las = 1,
xlim = c(0,12000),
col = violet)Чтобы сделать цвет полупрозрачным, есть две возможности:
- При создании нового цвета — передать в функцию
rgb()дополнительный параметрalpha =, который задает долю прозрачности в диапазоне от 0 до 1. - При модификации существующего цвета — вызвать функцию
adjustcolor()с параметромalpha =
Например:
violet. transp = adjustcolor(violet, alpha = 0.5)
barplot(okr$ХимЭкспорт,
names.arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz = TRUE,
las = 1,
xlim = c(0,12000),
col = violet.transp) transp = adjustcolor(violet, alpha = 0.5)
barplot(okr$ХимЭкспорт,
names.arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz = TRUE,
las = 1,
xlim = c(0,12000),
col = violet.transp)
transp = adjustcolor(violet, alpha = 0.5)
barplot(okr$ХимЭкспорт,
names.arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz = TRUE,
las = 1,
xlim = c(0,12000),
col = violet.transp)
green.transp = rgb(0, 1, 0, 0.5) # появился четвертый параметр
barplot(okr$ХимЭкспорт,
names.arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz = TRUE,
las = 1,
xlim = c(0,12000),
col = green.transp)Функция
adjustcolor()позволяет модифицировать все компоненты цвета, не только прозрачность.
На графике типа barplot вы имеете фактически несколько переменных, которые представлены столбиками. А это означает что для них можно использовать различные цвета. Вы можете передать в параметр col = вектор из цветов, соответствующих столбикам:
colors = c("red", "green", "blue", "orange", "yellow", "pink", "white","black")
barplot(okr$ХимЭкспорт,
names. arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz = TRUE,
las = 1,
xlim = c(0,12000),
col = colors) arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz = TRUE,
las = 1,
xlim = c(0,12000),
col = colors)
arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz = TRUE,
las = 1,
xlim = c(0,12000),
col = colors)На самом деле, такой винегрет из цветов на столбчатых диаграммах использовать не принято. Но вы должны понимать, что при необходимости можно поменять цвет отдельно выбранных столбиков. Например, мы можем показать красным цветом Центральный и Приволжский округа, которые являются лидерами по экспорту продукции химической промышленности:
colors = rep("gray", 8) # сделаем 8 серых цветов
colors[2] = "red"
colors[7] = "red"
barplot(okr$ХимЭкспорт,
names.arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz = TRUE,
las = 1,
xlim = c(0,12000),
col = colors)Еще одна интересная особенность использования цвета заключается в том, что количество указанных цветом может не совпадать с количеством рядов данных. Вы можете указать 2 или 3 цвета, и они будут циклически повторяться при визуализации данных:
Вы можете указать 2 или 3 цвета, и они будут циклически повторяться при визуализации данных:
colors=c("gray","steelblue")
barplot(okr$ХимЭкспорт,
names.arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz =TRUE,
las = 1,
xlim = c(0, 12000),
col = colors)Наконец, вещь, которой совершенно необходимо уметь пользоваться при работе с цветом в R — это цветовые палитры. Палитры чрезвычайно удобны, когда необходимо сгенерировать множество цветов, зная лишь основные оттенки. Для этого нужно создать палитру, используя функцию colorRampPalette():
# задаем 2 опорных цвета: черный белый
palet=colorRampPalette(c("black","white"))
# и автоматически генерируем 8 цветов между ними:
colors=palet(8)
# используем их для отображения:
barplot(okr$ХимЭкспорт,
names.arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz = TRUE,
las = 1,
xlim = c(0, 12000),
col= colors) США",
horiz = TRUE,
las = 1,
xlim = c(0, 12000),
col= colors)
США",
horiz = TRUE,
las = 1,
xlim = c(0, 12000),
col= colors)
# вы можете включить в палитру произвольное количество цветов:
palet=colorRampPalette(c("steelblue","white","purple4"))
colors=palet(8)
barplot(okr$ХимЭкспорт,
names.arg = names,
main = "Экспорт продукции химической промышленности",
xlab = "млн долл. США",
horiz=TRUE,
las = 1,
xlim = c(0, 12000),
col= colors)В R существует множество стандартных палитр, их список можно найти в справке и документации. Наиболее полезные из них:
Например, вы можете изменить цвета диаграммы, взяв их из одной из палитр или выбрав случайным образом из полной палитры цветов, используя функцию sample():
pie(okr$ХимЭкспорт, names2, main = "Доля федеральных округов в экспорте \n продукции химической промышленности", col=rainbow(length(names2)))
pie(okr$ХимЭкспорт, names2, main = "Доля федеральных округов в экспорте \n продукции химической промышленности", col=sample(colors(),5))Более богатый набор палитр можно найти в библиотеке RColorBrewer, которая представляет собой интерпретацию палитр, доступных на сайте colorbrewer2. org
org
library(RColorBrewer) # Откроем библиотеку RColorBrewer:
display.brewer.all() # Посмотрим, какие в ней имеются палитрыК каждой из этих палитр можно обратиться по названию с помощью функции brewer.pal(). Поскольку нам необходимы цвета для категориальных данных, следует использовать палитры из средней части (Set3 — Accent)
# выберем цвета из палитры Set2 по количеству секторов в круге:
colors = brewer.pal(length(names2),"Set1")
# И используем их при визуализации
par(mar = c(5, 5, 5, 5)) # установим поля
pie(okr$ХимЭкспорт, names2, main = "Доля федеральных округов в экспорте \n продукции химической промышленности", col=colors)
# Попробуем палитру Accent:
pie(okr$ХимЭкспорт, names2, main = "Доля федеральных округов в экспорте \n продукции химической промышленности", col=brewer.pal(length(names2),"Accent"))Настройки отображения
Графические параметры
Изменять размеры элементов графика можно независимо друг от друга, используя следующие параметры:
-
cex— общий масштаб элементов на графике -
cex.— масштаб подписей координат на оси axis -
cex.lab— масштаб подписей названий осей -
cex.main— масштаб заголовка графика -
cex.sub— масштаб подзаголовка графика -
cex.names— масштаб подписей факторов (для некоторых типов диаграмм)
 axis
axisНапример:
plot(tab$Год,
tab$Каспийское,
pch=20,
type="o",
ylim = c(0,12),
col="red3",
main="Объем сброса загрязненных сточных вод",
xlab="Год",
ylab="млрд.куб.м",
cex.axis=0.8,
cex.lab=0.7,
cex.main=0.9,
cex = 0.8)
points(tab$Год, tab$Карское, pch=20, col="forestgreen",cex = 0.8)
lines(tab$Год, tab$Карское, pch=20, col="forestgreen")
points(tab$Год, tab$Азовское, pch=20, col="steelblue",cex = 0.8)
lines(tab$Год, tab$Азовское, pch=20, col="steelblue")Аналогично происходит тонкая настройка цвета:
-
colцвет графика -
col.цвет подписей координат axis -
col.labцвет названий осей -
col.mainцвет заголовка -
col.subцвет подзаголовка -
fgцвет элементов переднего плана (оси, рамка и т.д.) -
bgцвет фона графика (background)
 axis
axis
plot(tab$Год,
tab$Каспийское,
pch=20,
type="o",
ylim = c(0,12),
col="red3",
main="Объем сброса загрязненных сточных вод",
xlab="Год",
ylab="млрд.куб.м",
cex.axis=0.8,
cex.lab=0.7,
cex.main=0.9,
col.lab = "grey50",
fg = "grey40")
points(tab$Год, tab$Карское, pch=20, col="forestgreen")
lines(tab$Год, tab$Карское, pch=20, col="forestgreen")
points(tab$Год, tab$Азовское, pch=20, col="steelblue")
lines(tab$Год, tab$Азовское, pch=20, col="steelblue")Разметка осей, рамка, сетка координат и произвольные линии
По умолчанию R подбирает оптимальный с точки зрения него шаг разметки осей, в зависимости от разброса значений по осям \(X\) и \(Y\), а также размеров графического устройства, на котором производится рисование. Изменяя размер окна прорисовки, вы получите различную разметку осей.
Изменяя размер окна прорисовки, вы получите различную разметку осей.
В то же время, часто возникает желание (или необходимость) самостоятельно управлять шагом разметки сетки. Для этого необходимо:
- Вызвать функцию
plot(), передав ей дополнительно параметрaxes = FALSE(убирает при рисовании обе оси) или один из параметровxaxt="n"/yaxt="n"(убирают оси \(X\) и \(Y\) соответственно) - Вызвать столько раз функцию
axis(), сколько вы хотите нарисовать осей, передав ей параметры для рисования каждой оси.
Функция axis() принимает следующие параметры:
-
side— сторона графика, на которой будет нарисована ось (1=bottom,2=left,3=top,4=right) -
at— вектор значений, в которых должны быть нарисованы метки оси -
labels— вектор подписей, которые будут нарисованы в местоположениях, указанных в параметреat. Этот параметр можно пропустить, если подписи совпадают с местоположениями меток -
pos— координата, вдоль которой будет нарисована ось -
lty— тип линии -
col— цвет линии и меток -
las— расположение подписей параллельно (\(0\)) или перпендикулярно (\(2\)) оси -
tck— длина метки относительно размера графика. Отрицательные значения дают метки, выходящие за пределы графика. положительные — внутрь графика. \(0\) убирает метки, \(1\) рисует линии сетки.
 Этот параметр можно пропустить, если подписи совпадают с местоположениями меток
Этот параметр можно пропустить, если подписи совпадают с местоположениями метокПри ручном построении осей полезно сразу же нарисовать рамку вокруг графика, используя функцию box().
Например:
plot(tab$Год,
tab$Каспийское,
type = "l",
axes = FALSE)
axis(side = 1,
at = seq(min(tab$Год), max(tab$Год), 1),
tck = -0.02,
labels = FALSE) # разметим ось X через 1 год, но рисовать подписи не будем
axis(side = 1,
at = seq(min(tab$Год), max(tab$Год), 3), # а подписи расставим через 3 года
tck = 0) # но рисовать метки не будем
# разметим ось Y через 1 млрд куб. м., округлив предварительно минимальное и максимальное значение до ближайшего целого снизу и сверху соответственно
axis(side = 2,
at = seq(floor(min(tab$Каспийское)), ceiling(max(tab$Каспийское)), 1),
tck = -0.02)
box() # добавим рамку для красоты м., округлив предварительно минимальное и максимальное значение до ближайшего целого снизу и сверху соответственно
axis(side = 2,
at = seq(floor(min(tab$Каспийское)), ceiling(max(tab$Каспийское)), 1),
tck = -0.02)
box() # добавим рамку для красоты
м., округлив предварительно минимальное и максимальное значение до ближайшего целого снизу и сверху соответственно
axis(side = 2,
at = seq(floor(min(tab$Каспийское)), ceiling(max(tab$Каспийское)), 1),
tck = -0.02)
box() # добавим рамку для красотыДля размещения сетки координат существует функция grid(nx = NULL, ny = nx, col = "lightgray", lty = "dotted", lwd = par("lwd"), equilogs = TRUE). Как видно из набора ее параметров, сетка определяется количеством линий в горизонтальном и вертикальном направлении. Это не всегда бывает удобно, поскольку как правило мы хотим задать шаг сетки конкретной величины. По умолчанию, однако, линии сетки выбираются автоматически, как и метки:
plot(tab$Год,
tab$Каспийское,
type = "l",
col = "red")
grid()Вы, разумеется, можете поменять их количество, однако R не будет за вас согласовывать шаг сетки и шаг меток осей, поскольку метки генерируются на стадии рисования plot() или axis() и не запоминаются.
plot(tab$Год,
tab$Каспийское,
type = "l",
col = "red")
grid(10, 5)Функция grid() на самом деле является оберткой функции abline(), которая позволяет рисовать произвольные линии на графике. Дана функция предоставляет следующие возможности построения линий и серий линий:
-
a, b— коэффициенты уравнения \(y = ax + b\). Таким образом можно определить только одну линию. -
coef— принимает вектор из двух значений, которые интерпретируются какaиb. То есть, это альтернативная форма записи предыдущего случая. -
h— значение (значения) координат \(y\) для горизонтальной линии (серии горизонтальных линий). То есть, вы можете передать в этот параметр как одиночное значение, так и вектор значений. В зависимости это этого нарисуется одна горизонтальная линия или серия горизонтальных линий. -
v— значение (значения) координат \(x\) для вертикальной линии (серии вертикальных линий). 3\) по оси \(Y\). Для этого выполним следующую последовательность действий:plot(tab$Год, tab$Каспийское, type="n") # режим 'n' позволяет ничего не рисовать, но заложить поле графика в соответствии с данными, указанными в параметрах x и y # Вычисляем линии сетки xlines = seq(min(tab$Год), max(tab$Год), 1) ylines = seq(ceiling(min(tab$Каспийское)), floor(max(tab$Каспийское)), 1) # Рисуем линии сетки abline(h = ylines, v = xlines, col = "lightgray") # Рисуем график lines(tab$Год, tab$Каспийское, col="red3") points(tab$Год, tab$Каспийское, pch = 20, col="red3") # Выделяем значение 10 по оси Y: abline(h = 10, col = "blue", lwd = 2) # Рисуем дополнительно рамку, т.к. сетку координат мы рисовали после графика box()Аннотации данных (текст на графике)
Аннотации данных добавляются на график с помощью функции
text(). В качестве трех обязательных аргументов ей необходимо передать координаты точек размещения текста, и вектор подписей. Также полезным будет указать параметр pos=, отвечающий за размещение аннотации относительно точки. Значенияpos, равные 1, 2, 3 и 4, соответствуют размещению снизу, слева, сверху и справа от точки:text(tab$Год, tab$Каспийское, labels = tab$Каспийское, cex = 0.75, pos = 3)К сожалению, стандартный механизм размещения аннотаций пакета
graphicsне обладает возможностью устранения конфликтов подписей. Однако это возможно для графиков, построенных с помощью библиотек lattice и ggplot2. Для этого можно воспользоваться пакетом directlabels или ggrepel.Легенда
Легенда к графику размещается с помощью функции
legend(). Эта функция принимает несколько аргументов, включая: местоположение, заголовок, названия элементов, графические параметры. Местоположение может быть задано координатами \((x,y)\) в системе координат графика, но удобнее пользоваться следующими предопределенными константами:"bottomright","bottom","bottomleft","left","topleft","top","topright","right","center".Чтобы в легенде появились точки, необходимо задать параметр
pch=. Для линейной легенды, следует задать, соответственно, параметрlty =и/илиlwd =. Каждый из этих параметров должен быть вектором по количеству элементов легенды:par(mar = margins.default) # Найдем ограничивающий прямоугольник вокруг всех рядов данных xrange = range(tab$Год) yrange = range(tab$Каспийское, tab$Карское, tab$Азовское) # Построим пустой график с разметкой осей и всеми заголовками plot(xrange, yrange, type="n", main="Объем сброса загрязненных сточных вод", xlab="Год", ylab="млрд.куб.м", cex.axis=0.8, cex.lab=0.7, cex.main=0.9, col.lab = "grey50", fg = "grey40") # Добавим на график сетку координат grid() # Добавим на график данные points(tab$Год, tab$Каспийское, pch=20, col="red3") lines(tab$Год, tab$Каспийское, pch=20, col="red3") points(tab$Год, tab$Карское, pch=20, col="forestgreen") lines(tab$Год, tab$Карское, pch=20, col="forestgreen") points(tab$Год, tab$Азовское, pch=20, col="steelblue") lines(tab$Год, tab$Азовское, pch=20, col="steelblue") # Определим положение, названия и цвета: main = "Море" location = "topright" labels = c("Каспийское", "Карское", "Азовское") colors = c("red3", "forestgreen", "steelblue") # Если цвет передать в параметр fill, то по умолчанию # нарисуются цветовые плашки: legend(location, labels, title = main, fill=colors)pts = c(20, 20, 20) # каждый элемент показывается точкой типа 20 lns = c(1, 1, 1) # каждый элемент показывается линией толщиной 1 # теперь посмотрим на легенду (она нарисуется поверх старой) legend(location, labels, title = main, col = colors, pch = pts, lwd = lns)Более подробно с разнообразными опциями размещения легенды на графике вы можете познакомиться, набрав в консоли команду
?legend.Как смотреть на картины и понимать их
«Теории и практики» публикуют отрывок из книги «Как смотреть на картины», в которой искусствовед Сьюзен Вудфорд на примерах самых разных произведений рассказывает, как научиться понимать искусство, на что обращать внимание, как объяснить, что какие-то картины нравятся нам больше других, и что нужно знать, чтобы оценить на первый взгляд непримечательные работы.
Существует множество способов смотреть на картины. Для этой главы мы выбрали четыре произведения живописи, относящихся к разным периодам и стилям, чтобы рассмотреть их с нескольких несхожих точек зрения.
Для чего служат картины?
Зададимся вопросом: для чего служат картины? Около пятнадцати тысяч лет назад на потолке пещеры, находящейся на территории современной Испании, было создано очень убедительное изображение бизона. Попробуем представить себе, какую функцию выполняло это изображение, находящееся в темном углу недалеко от входа в пещеру? Предполагают, что его цель — магическая, и что оно было призвано придать своему создателю (или его племени) дополнительную силу, позволяющую поймать и убить изображенное животное.
Тот же принцип действует в религии вуду: в куклу, похожую на определенного человека, втыкают булавку, чтобы принести этому человеку вред. Должно быть, пещерный живописец верил, что рисунок поможет ему на охоте.Наскальный рисунок с изображением бизона. Первобытный художник. Пигменты, сделанные из угля и охры. Пещера Альтамира, Испания. 15–10 тыс. до нашей эры
Воскрешение Лазаря. Византийский мастер. Мозаика Базилика Сант Аполлинаре Нуово, Равенна, Италия. VI век
Вторая картина совсем не похожа на первую — это мозаика из раннехристианской церкви. Легко прочитывается ее сюжет — воскрешение Лазаря. Лазарь был мертв уже четыре дня, но Христос потребовал открыть вход в пещеру, где его похоронили, обратил взор к небу и произнес:
Отче! Я и знал, что Ты всегда услышишь Меня; но сказал сие для народа, здесь стоящего, чтобы поверили, что Ты послал Меня.
Сказав это, Он воззвал громким голосом: Лазарь! Иди вон.
И вышел умерший, обвитый по рукам и ногам погребальными пеленами…
Ин.
11: 41–44Мозаика с восхитительной наглядностью иллюстрирует эту историю; мы видим, как Лазарь, «обвитый по рукам и ногам погребальными пеленами», выходит из пещеры. Мы видим, как облаченный в пурпурное одеяние Христос призывает Лазаря повелительным жестом. Рядом с ним один из «здесь стоящих», которых должно убедить чудо, потрясенно отводит руку. Композиция построена просто и ясно: на золотом фоне изображены плоские, четко очерченные фигуры. Эта сцена не столь живая, как наскальный рисунок, но те, кто знаком с изображенным сюжетом, легко его распознают.
Какой цели служила эта мозаика, будучи частью украшения церкви? В VI веке, когда она была создана, очень немногие умели читать. А церковь стремилась к тому, чтобы учение, изложенное в Евангелии, распространилось как можно шире. Папа Григорий Великий объяснял: «Иконы для неграмотных суть то же, что Священное Писание для грамотных». Иначе говоря, люди могли лучше понять Библию, глядя на такие доходчивые иллюстрации к ней, как эта мозаика.
На соседней странице вы видите картину кисти Бронзино, живописца-интеллектуала XVI века. Он изобразил Венеру, языческую богиню любви, которую отнюдь не по-сыновьи обнимает крылатый юноша — ее сын Купидон. Справа от центральной группы мы видим жизнерадостного мальчика: по мнению одного из специалистов, он олицетворяет Удовольствие. За ним — загадочная девушка в зеленом; мы с удивлением замечаем под ее платьем тело змеи. Судя по всему, она олицетворяет Лживость — дурное качество, злонамеренность под маской искренности, — которая порой сопутствует любви. Слева от центральной группы изображена злобная старуха, рвущая на себе волосы. Это Ревность — союз зависти и отчаяния, без которого редко обходится любовь.
В верхней части картины изображены две фигуры, приподнимающие завесу, которая скрывала сцену от посторонних глаз. Крылатый мужчина — это отец-Время; за его плечами — символ времени, песочные часы. Время обнаруживает превратности, сопутствующие чувственной любви. Женщина слева от Времени — по всей вероятности, Правда, открывающая взрывную смесь терзаний и наслаждений, рождаемую в нас дарами Венеры.
Итак, эта картина представляет собой нравоучение: ревность и лживость — не менее частые спутники любви, чем удовольствие. Но произведение Бронзино лишено той простоты, с какой показана история воскрешения Лазаря: его мораль воплощена в замысловатой аллегории с использованием персонификаций. Перед живописцем не стояла задача в доступной форме изложить историю для неграмотных — напротив, он стремился заинтриговать и даже раздразнить просвещенную аудиторию.
Аллегория с Венерой и Купидоном. Аньоло Бронзино. Около 1545 года
Осенний ритм (No 30). Джексон Поллок. 1950 год
Картина была написана для великого герцога Тосканского, который преподнес ее королю Франции Франциску I. Обращенная к узкому кругу образованных людей, она создавалась одновременно как назидание и развлечение.
И наконец, взгляните еще на одну картину (вверху) — она написана сравнительно недавно американским живописцем Джексоном Поллоком. В ней вы не найдете внешних реалий: нет ни бизона, которого нужно поймать, ни религиозного сюжета, нуждающегося в пересказе, ни сложной аллегории, требующей разгадки.
Напротив, мы словно видим, как живописец швырял краску на огромный холст, чтобы создать волнующую и живую абстрактную композицию. В чем цель такой картины? Она призвана выразить творческую активность и физическую энергию художника, рассказать зрителю о действиях его тела и мысли во время создания произведения.Культурный контекст
Второй способ анализировать картины — задать себе вопрос о том, что они могут поведать о культуре своей эпохи. Так, наскальная живопись может рассказать нам кое-что — пусть и не много — о первобытном человеке, который перемещался с места на место, охотясь на диких животных, и иногда находил убежище в пещерах, но не строил постоянных поселений и не занимался земледелием.
Христианская мозаика VI века свидетельствует о патерналистской культуре, в которой образованная элита просвещала необразованные массы. Она говорит о том, что на заре христианства было важно представить его догматы в доходчивой форме, чтобы простые люди могли постичь смысл этой еще сравнительно молодой религии.
Аллегория Бронзино красноречивее любых слов повествует о высокоинтеллектуальном и куртуазном — или даже пресыщенном — обществе: его представителям нравились загадки и головоломки, искусство было для них изощренной игрой.
Картина ХХ века рассказывает о людях эпохи, которая высоко ценит личное видение и уникальные действия художника, отвергая традиционные ценности привилегированных классов в пользу свободы самовыражения.
Сходство
Третий способ рассматривать картины — попытаться понять, насколько они правдоподобны. Достижение сходства с природой было важной и очень сложной задачей искусства в классической древности (VI–IV века до н. э.) и в Западной Европе со времен Ренессанса (с XV века) до начала ХХ столетия.
Многие поколения художников стремились сделать картины похожими на окружающий мир. Однако это не всегда было для них главным. Следует с осторожностью применять к произведениям искусства наши нынешние стандарты точности, поскольку вполне возможно, что их авторы руководствовались совсем иными целями.
Средневековый мозаичист, стремившийся рассказать библейскую историю максимально убедительно, изобразил фигуры не так естественно, как, например, Бронзино, но сделал своих персонажей легкоузнаваемыми и разместил в центре композиции Христа, подчеркнув значимость не только его фигуры, но и его жеста. Более всего этот мастер стремился к ясности; он остерегался даже намека на неоднозначность, а сложность и сходство с тем, что мы считаем естественными человеческими чертами, показались бы ему лишь отвлекающими деталями.Подобным образом и работы Поллока, автора картины Осенний ритм, столь рьяно стремившегося к самовыражению при помощи краски, нельзя судить с точки зрения сходства с природой, которое нисколько его не волновало. Он хотел передать характер своих чувств и не ставил перед собой цель задокументировать то, что его окружало.
Итак, хотя нам часто кажется важным, насколько похожа та или иная картина на реальность, нам стоит быть осторожнее и, прежде чем задаваться этим вопросом, удостовериться в его уместности.
Победный ветер. Ясный день. Кацусика Хокусай. 1830-1832 годы
Композиция
Четвертый способ восприятия картин заключается в том, чтобы рассматривать их с точки зрения композиции, то есть того схематического рисунка, который составляют в них формы и цвета. Например, внимательно присмотревшись к Аллегории Бронзино, мы увидим, что основная группа — Венера и Купидон — приблизительно напоминает своими очертаниями букву L, повторяющую угол картинной рамы. Кроме того, мы можем заметить, что живописец уравновесил эту L другой группой, по форме напоминающей ту же букву, но перевернутую: ее образуют фигура мальчика-Удовольствия, а также голова и вытянутая рука отца-Времени. Вместе две буквы L образуют прямоугольник, который надежно закрепляет изображение внутри рамы, тем самым придавая устойчивость очень сложной в целом композиции.
Композиция — это схематический рисунок, который составляют в картине формы и цвета
Теперь рассмотрим другие особенности композиции.
Заметьте, что все пространство в картине Бронзино заполнено предметами и фигурами; глазу негде отдохнуть. Эта беспокойная активность форм связана с самим сюжетом произведения, который можно обозначить как смятение и неразрешимость. Любовь, Удовольствие, Ревность и Лживость переплелись в изощренный формальный и интеллектуальный узел.Художник обвел фигуры жестким контуром, а лицам придал мягкую округлость. Персонажи картины будто сделаны из мрамора. Ощущение холодной жесткости подчеркнуто преобладающими оттенками — бледно-голубым и нежно-белым, с редкими вкраплениями зеленого или темно-синего. (Едва ли не единственным теплым оттенком является здесь красно-розовый цвет подушки, на которую оперся коленями Купидон.) Все эти особенности совершенно не соответствуют тому, что мы обычно связываем со сферой чувственности. Таким образом, жесты любви и страсти, обычно нежные или горячие, здесь переданы как расчетливые и хладнокровные.
Формальный анализ композиции произведения помогает нам лучше понять его смысл, а также оценить те приемы, при помощи которых художник достиг желаемого эффекта.
Разговор о картинах
В двенадцати главах этой книги мы рассмотрим картины, созданные в разное время и в разных странах. Сначала мы будем анализировать их с точки зрения сюжета, но постепенно начнем уделять больше внимания форме и композиции, особенности которых не так просто уловить с первого взгляда. По пути нам встретятся понятия, порой кажущиеся неожиданными, так как их невозможно соотнести ни с содержанием, ни с формой, но вместе с тем способные помочь понять художественное произведение, а значит, и получить от него удовольствие.
Мы не будем изучать связи между искусством и обществом, в котором оно создается, и выстраивать стили и направления в хронологическом порядке. Существует множество прекрасных книг по истории искусства, обозревающих произведения в историческом контексте и прослеживающих эволюцию стилей во времени.
Для нас же самое главное — не просто смотреть на картины, но и говорить о них, ведь, как бы странно это ни звучало, простого созерцания недостаточно.
Мы уверены, что единственный способ перейти от пассивного наблюдения к активному, проницательному видению — это поиск слов, необходимых для описания и анализа произведений искусства.Входная диагностическая работа по алгебре (тест)
Входной срез по алгебре 8 класс Вариант — 1
Часть 1.
A1. Указать наименьшее из следующих чисел.
1) 2) 0,7 3) 4) 0,8
A2. Упростить выражение .
1) x4 2) x2 3) x3 4) x8
A3. Представить в виде многочлена (5a – 2b)2.
1) 25a2 – 4b2 2) 25a2+20ab+4b2
3) 25a2 – 20 ab + 4b2 4) 5a2 – 10 ab + ab2
А4.
Каким условием можно задать множество точекизображенное на рисунке:
1) 2)
3) 4)
Часть 2.
B1. Найти значение выражения при a=-1,5; b=2.
B2. Разложить на множители:
B3. Найти 1,2% от 30г. лекарства.
Входной срез по алгебре 8 класс Вариант — 2
Часть — 1
A1. Указать наименьшее из следующих чисел.
1) 2) 0,35 3) 4) 0,4
A2. Упростить выражение a3*(a4)2.
1) a11 2) a14 3) a9 4) a24
A3. Представить в виде многочлена (2-3y)(y+5).
1) -3y2 – 13y+10 2) -3y2+17y+10
3) 3y2 – 13y+ 10 4) -3y2 + 10
A4.
Найдите значение выражения1) 2) 2 3) 162 4)
Часть 2.
B1. Найти значение выражения при b= ; c= .
B2. Разложить на множители:
B3. Шахматист из 40 сыгранных партий выиграл 24. Сколько процентов сыгранных партий он выиграл?
Что такое копланарные точки? — Определение и примеры — Видео и стенограмма урока
Четыре или более очков
Как только мы набираем четыре или более очков, ситуация меняется. Группы из четырех и более точек могут быть компланарными, а могут и не быть. Давайте еще раз посмотрим на картинку. A, B, C и D по-прежнему компланарны; однако A, B, C и E не лежат в одной плоскости. Это может быть более очевидным, если мы нарисуем линии, соединяющие точки. Черные линии находятся на плоскости, но красные линии находятся над плоскостью.
Четырехсторонняя фигура представляет собой не плоскую плоскость, а изогнутую.Давайте рассмотрим реальную ситуацию, когда вязальная спица была пропущена через лист бумаги. Черная пряжа находится на бумаге, а красная нить находится над бумагой.
Давайте посмотрим на другой пример из жизни. Коробка из папиросной бумаги покрыта листьями. Точки были размещены на кончиках четырех листьев и обозначены W, X, Y и Z.На первом рисунке видно, что точки X, Y и Z лежат в одной плоскости. Они образуют треугольник, и вы можете себе это представить. Если бы вы разрезали коробку с салфетками и прошли через эти точки, у вас был бы кусок коробки с салфетками, основанием которого была бы плоская фигура, треугольник.
Сравните это со второй ситуацией, в которой все точки W, X, Y и Z связаны.
Если бы вы вырезали этот участок из коробки с салфетками, вам, скорее всего, пришлось бы несколько раз менять угол наклона ножниц или канцелярского ножа, вместо того, чтобы сделать один ровный разрез.Когда вы закончите резать, четыре точки обрезанного края не будут образовывать единую плоскую поверхность. Эти точки не компланарны.Иногда четыре точки лежат в одной плоскости, как показано на рисунке коробки с салфетками. Все четыре точки, являющиеся углами передней части коробки, лежат в одной плоскости. При соединении они образуют единую плоскую поверхность.
Важность компланарных точек
В строительстве часто важно, чтобы точки находились в одной плоскости.Здание теряет устойчивость, если четыре угла стены или пола не лежат в одной плоскости. Строители используют такие инструменты, как уровень, чтобы обеспечить копланарность точек.
При использовании карты может показаться, что города лежат в одной плоскости, поскольку карта нарисована на плоской поверхности. Однако опыт говорит нам, что это не всегда так! Специальные карты, называемые топографическими картами, были разработаны для предоставления информации о местах, копланарных на бумаге, но не копланарных в реальном мире.
Резюме урока
Копланарные точки — это три или более точек, лежащих в одной плоскости. Любое множество из трех точек в пространстве компланарно. Набор из четырех точек может быть компланарным или некомпланарным. Чтобы решить, являются ли точки компланарными или нет, может быть полезно нарисовать картинку или использовать реальный объект для решения задач, связанных с компланарными точками.
Результаты обучения
По окончании этого урока вы сможете:
- Определять копланарные точки
- Объясните, почему любой набор из трех точек в пространстве компланарен и когда набор из четырех точек компланарен
- Вспомните, как определить, компланарны ли точки
- Определите реальную важность компланарных точек
Положения и условия | Программа вознаграждений за лояльность
4.
3 Преимущества элитного членства в участвующих брендах4.3.a. Преимущества членства Marriott Bonvoy Silver Elite . Участники со статусом Silver Elite и выше имеют право на получение следующих преимуществ:
я. 10% бонусных баллов . Бонусные баллы зависят от уровня элитного членства и рассчитываются на основе базовых баллов, заработанных во время пребывания. Доступно для элитных участников во всех участвующих брендах, если иное не указано в разделе 1.2.a.
ii. Приоритетная поздняя выписка .В зависимости от наличия возможности. Пожалуйста, позвоните на стойку регистрации утром перед отъездом и сообщите им запланированное время отъезда. Доступно во всех участвующих брендах, кроме отелей Marriott Vacation Club®, Marriott Grand Residence Club® и Vistana™ Network.
III. Полная гарантия бронирования . Для участия в бронировании необходимо указать номер участника программы лояльности и номер действительной кредитной карты.
Если участвующий отель не может выполнить бронирование, он оплачивает аналогичное проживание поблизости для элитного участника в эту ночь и компенсирует участнику неудобства.Участвующий отель должен быть открыт и находиться в рабочем состоянии, чтобы можно было применить льготу/компенсацию по Гарантии окончательного бронирования. В отелях The Ritz-Carlton® и St. Regis Гарантия полного бронирования распространяется только на участников Titanium Elite и Ambassador Elite. Полная гарантия бронирования предоставляется в отелях следующих брендов: The Ritz-Carlton®, St. Regis, EDITION®, The Luxury Collection, W Hotels, JW Marriott®, Marriott Hotels®, Sheraton, Delta Hotels®, Le Méridien, Westin, Отели Autograph Collection®, отели Renaissance®, Tribute Portfolio, отели Gaylord®, Courtyard®, Four Points, SpringHill Suites®, отели Protea®, Fairfield by Marriott®, отели AC®, отели Aloft®, отели Moxy®, Residence Inn® , TownePlace Suites® и Element.Полная гарантия бронирования не предоставляется в отелях следующих брендов: Design Hotels, Marriott Vacation Club, Marriott Grand Residence Club и Vistana properties. В соответствии с разделом 4.1.c. если элитный участник имеет подтвержденное бронирование, но переселяется из объекта по прибытии, участвующий отель выплачивает компенсацию в соответствии с гарантией окончательного бронирования на эту дату в соответствии с Правилами программы. Если элитный участник получает компенсацию в рамках Ultimate Reservation Guarantee, он/она не имеет права на получение дополнительной элитной компенсации в рамках гарантии Elite Benefits Guarantee.ПОЛНАЯ ГАРАНТИЯ БРОНИРОВАНИЯ
Участвующие бренды
Компенсация гостю*
EDITION, The Luxury Collection, W Hotels, JW Marriott, Marriott Hotels, Sheraton, Delta Hotels, Le Méridien, Westin, Autograph Collection, Renaissance Hotels, Tribute Portfolio, Gaylord Hotels 200 долларов США и 90 000 баллов для всех элитных участников
Courtyard, Four Points, SpringHill Suites, Protea Hotels, Fairfield, AC Hotels, Aloft, Moxy, Residence Inn, TownePlace Suites, Element У.
S. 100 долларов США для всех участников с элитным статусом, за исключением участников со статусом Platinum Elite, Titanium Elite и Ambassador Elite, которые получают 100 долларов США и 90 000 балловРитц-Карлтон**, Сент-Реджис** 200 долларов США и 140 000 баллов для участников Titanium Elite и Ambassador Elite
* Участвующие объекты за пределами США будут платить эквивалентную сумму в своей местной валюте.
ив. Магазин подарков Скидка 10% на розничные товары .Одежда, подарки и сувениры, принты и логотипы, украшения и аксессуары, средства по уходу за лицом и телом. Скидка на сувенирный магазин распространяется на участвующие в акции сувенирные магазины, управляемые Marriott. Участвующие бренды включают: St. Regis, The Luxury Collection, W Hotels, JW Marriott, Marriott Hotels, Sheraton, Marriott Vacation Club, Marriott Grand Residence Club, Delta Hotels, Le Méridien, Westin, Autograph Collection, Renaissance Hotels, Tribute Portfolio, Gaylord.
Отели, отели Protea и отели Moxy.В отелях The Ritz-Carlton и EDITION предоставляется скидка в десять процентов (10%) только на брендовые товары, за исключением мелких вещей, приобретенных в сувенирных магазинах на территории отеля. Для получения скидки необходимо предъявить карту членского счета (физическую карту или мобильную карту).Скидка в сувенирном магазине не предоставляется в отелях следующих брендов: Courtyard, Four Points, SpringHill Suites, Fairfield, AC Hotels, Aloft, Residence Inn, TownePlace Suites, Element, Design Hotels™ и Vistana.
4.3.б. Преимущества членства Marriott Bonvoy Gold Elite . В дополнение ко всем преимуществам, которые получают участники со статусом Silver Elite, участники со статусом Gold Elite и выше имеют право на получение следующих преимуществ:
я. 25% бонусных баллов . Бонусные баллы зависят от уровня элитного членства и рассчитываются на основе базовых баллов, заработанных во время пребывания. Доступно для элитных участников во всех участвующих брендах, если иное не указано в разделе 1.
2.a.ii. Приветственный элитный подарок в виде баллов (в зависимости от бренда-участника). Участники со статусом Gold Elite получают один элитный приветственный подарок в виде баллов при проживании в течение одной или нескольких ночей подряд, как описано в 2.1.d, даже если они регистрируются и выезжают из одного и того же отеля-участника в течение 24 часов. Участникам, указав, что они предпочитают зарабатывать мили, необходимо инициировать перевод баллов Elite Welcome Gift в мили, как описано в разделе 2.3.
ELITE ПРИВЕТСТВЕННЫЙ ПОДАРОК БАЛЛОВ ЗА GOLD ELITE
Участвующие бренды
Приветственный элитный подарок
Ритц-Карлтон, Ст.Regis, EDITION, The Luxury Collection, W Hotels, JW Marriott, Marriott Hotels, Sheraton, Marriott Vacation Club, Marriott Grand Residence Club, Delta Hotels, Le Méridien, Westin, Autograph Collection, Design Hotels, Renaissance Hotels, Tribute Portfolio, Gaylord Hotels , Дома и виллы от Marriott International. Объекты недвижимости Vistana предлагают элитный приветственный подарок только тем, кто не является владельцем Vistana.500 баллов за пребывание
Courtyard, Four Points, SpringHill Suites, Protea Hotels, Fairfield, AC Hotels, Aloft, Moxy, Residence Inn, TownePlace Suites, Element 250 баллов за пребывание
iii. 14:00 Поздний выезд . Это преимущество предоставляется в зависимости от наличия возможности. Участник должен позвонить на стойку регистрации утром перед выездом и запросить поздний выезд до 14:00. Эта привилегия доступна во всех участвующих брендах, за исключением отелей Marriott Vacation Club, Marriott Grand Residence Club и Vistana.
ив. Бесплатное повышение категории номера для участников со статусом Gold Elite . Эта привилегия предоставляется при наличии возможности на день прибытия и предоставляется только в личном номере участника без дополнительной оплаты.
Улучшенные номера могут включать в себя номера с желаемым видом, номера на верхних этажах, угловые номера, номера со специальными удобствами, номера на представительских этажах. В отеле The Ritz-Carlton не предусмотрены номера с прямым доступом в клуб. Обновления предоставляются в зависимости от наличия и определяются каждым отелем-участником. Бесплатное повышение категории номера для участников со статусом Gold Elite доступно во всех участвующих брендах, кроме Marriott Vacation Club, Marriott Grand Residence Club, отелей Aloft, Element и Vistana.по сравнению с Бесплатный расширенный доступ в Интернет . Эта привилегия предоставляется там, где она доступна, независимо от источника бронирования, во всех участвующих брендах по всему миру, за исключением отелей EDITION, Marriott Vacation Club, Marriott Grand Residence Club и Vistana. Это преимущество не распространяется на конференц-залы. Бесплатный доступ в Интернет может быть доступен для всех гостей в некоторых магазинах/местах.
4.3.с. Преимущества членства Marriott Bonvoy Platinum Elite . В дополнение ко всем преимуществам, которые получают участники со статусом Gold Elite, участники со статусом Platinum Elite и выше имеют право на получение следующих преимуществ:
я. 50% бонусных баллов . Бонусные баллы зависят от уровня элитного членства и рассчитываются на основе базовых баллов, заработанных во время пребывания. Доступно для элитных участников во всех участвующих брендах, если иное не указано в разделе 1.2.a.
ii. Бесплатное повышение категории номера для участников со статусом Platinum Elite . Участники со статусом Platinum Elite и выше получают бесплатное повышение категории номера до лучшего доступного номера в зависимости от наличия возможности в день прибытия на весь срок пребывания.Бесплатное повышение категории номера включает люксы, номера с желаемым видом, номера на верхних этажах, угловые номера, номера с особыми удобствами или номера на представительских этажах.
В The Ritz-Carlton люксы включены только для участников Titanium Elite и Ambassador Elite, а номера с прямым доступом в клуб исключены. Повышение категории номера предоставляется в зависимости от наличия возможности и определяется каждым отелем-участником. Бесплатное повышение категории номера для участников Platinum Elite и выше доступно во всех участвующих брендах, за исключением Marriott Vacation Club, Marriott Grand Residence Club, отелей Aloft, Element и Vistana.III. Элитный приветственный подарок . Участники со статусом Platinum Elite и выше получают один элитный приветственный подарок (по своему выбору, если предлагается несколько вариантов) при проживании в течение одной или нескольких ночей подряд, как описано в 2.1.d, даже если они регистрируются и выезжают из одного и того же отеля-участника в течение 24 часа. Приветственный подарок Elite для участников со статусом Platinum Elite и выше не включает приветственный подарок Elite в виде баллов, который предназначен только для участников Gold Elite (см.
4.3.b). Участники, выбравшие или получившие баллы в качестве приветственного элитного подарка и обозначившие свой предпочтительный способ получения миль, должны инициировать перевод приветственных элитных баллов в мили, как описано в разделе 2.3. Если элитный приветственный подарок не предлагается по прибытии, применяется компенсация (см. ниже). Выбор зависит от бренда-участника:ПРИВЕТСТВЕННЫЙ ПОДАРОК ДЛЯ УЧАСТНИКОВ PLATINUM ELITE И ВЫШЕ
Участвующие бренды
Приветственный элитный подарок
Компенсация гостю*
JW Marriott, Marriott Hotels, Delta Hotels, Autograph Collection, Renaissance Hotels США, Канада, Европа: 1000 баллов за пребывание или U.
Кредит в размере 10 сингапурских долларов на еду и напитки («F&B») за весь период проживанияАзия, Австралия, острова Тихого океана, Карибский бассейн, Мексика, Центральная Америка, Южная Америка, Ближний Восток и Африка: 1000 баллов за пребывание или питание и напитки за пребывание
Только КУРОРТЫ:
США, Канада, Европа: 1000 баллов за проживание или завтрак в ресторане за каждую ночь пребывания для участника +1Азия, Австралия, острова Тихого океана, Карибский бассейн, Мексика, Центральная Америка, Южная Америка, Ближний Восток и Африка: 1000 баллов за пребывание или питание и напитки за пребывание или завтрак в ресторане за ночь пребывания для участника +1
У.100 долларов США Отели Гейлорда 1000 баллов за пребывание или ваучер на еду и напитки в размере 10 долларов США за пребывание 100 долларов США St. Regis, The Luxury Collection, W Hotels, Sheraton, Le Méridien, Westin, Tribute Portfolio1000 баллов за проживание или удобства за проживание или завтрак в ресторане за ночь пребывания для участника +1 (включая курорты) 100 долларов США The Ritz-Carlton, EDITION, Marriott Vacation Club, Marriott Grand Residence Club, Design Hotels TM , Дома и виллы Marriott International.Объекты недвижимости Vistana предоставляют элитный приветственный подарок только тем участникам, которые не являются владельцами Vistana, используя свою долю владения.
1000 баллов (за пребывание) Н/Д
Внутренний двор США, Канада, Европа: 500 баллов за пребывание или кредит в размере 10 долларов США на еду и напитки за ночь пребывания для участника +1**
Азия, Австралия, острова Тихого океана, Карибский бассейн, Мексика, Центральная Америка, Южная Америка, Ближний Восток и Африка: объекты без лаунджа — 500 баллов за пребывание или питание и напитки за пребывание или U.
Кредит в размере 10 долларов США на еду и напитки за ночь проживания для участника +1**Недвижимость с гостиной — 500 баллов за проживание и завтрак в гостиной — если гостиная закрыта, завтрак в ресторане за каждую ночь пребывания для участника +1
50 долларов США
Отели AC, отели Moxy США, Канада, Европа: 500 баллов за пребывание или кредит в размере 10 долларов США на еду и напитки за ночь пребывания для участника +1**
Азия, Австралия, острова Тихого океана, Карибский бассейн, Мексика, Центральная Америка, Южная Америка, Ближний Восток и Африка: 500 баллов за пребывание или питание и напитки за пребывание или U.Кредит на еду и напитки в размере 10 сингапурских долларов за ночь пребывания
AC Гостиницы:
50 долларов США
Мокси Гостиницы:
25 долларов США
SpringHill Suites, Fairfield, Residence Inn, TownePlace Suites США, Канада, Европа: 500 баллов за пребывание или питание и напитки
Азия, Австралия, острова Тихого океана, Карибский бассейн, Мексика, Центральная Америка, Южная Америка, Ближний Восток и Африка: 500 баллов за пребывание или питание и напитки
Спрингхилл Сьютс, Residence Inn:
У.
50 долларов СШАФэрфилд, TownePlace Suites:
25 долларов США
Четыре точки, наверху 500 Баллов за проживание или удобства или завтрак в ресторане за каждую ночь пребывания для участника +1 Четыре точки:
50 долларов США
Наверху: 25 долларов США
Отели Протеа 500 баллов за проживание или завтрак в ресторане за каждую ночь проживания для участника +1 У.50 долларов США Элемент 500 баллов за проживание или удобства 25 долларов США *Участвующие объекты за пределами США будут платить эквивалентную сумму в своей местной валюте.
** Кредит на еду и напитки в размере 10 долларов США за ночь проживания предоставляется участнику. Дополнительный кредит в размере 10 долларов США на еду и напитки за ночь пребывания предоставляется одному (1) гостю, проживающему в том же номере, что и участник. Кредит в размере 10 долларов США за ночь пребывания не накапливается во время пребывания.Например, Участник, который не использовал кредит в размере 10 долларов США в один день, не получит 20 долларов США для использования на следующий день.
ив. Гарантированный доступ в зал ожидания. Участник и один гость, проживающий в одном номере, получают доступ в лаундж Concierge/Executive/Club/Signature Club/M Club (совместно именуемые «Lounge» или «Lounge Access») в обычные часы работы в отелях JW Marriott, Marriott. , Sheraton, Delta Hotels, Le Méridien, Westin, Autograph Collection и Renaissance Hotels. Курортная недвижимость исключена из отелей JW Marriott, Marriott Hotels, Delta Hotels, Autograph Collection и Renaissance Hotels.
В отелях Delta Hotels без Signature Club Lounge в качестве одобренной альтернативы участник получит доступ к Elite Pantry. Доступ в лаундж предоставляется в отелях Courtyard с лаунджем за пределами США и Канады. Эта привилегия не действует, если завтрак включен в стоимость или бренд предлагает утвержденную альтернативу. За доступ в зал ожидания может взиматься дополнительная плата, если количество гостей превышает количество участников плюс одно пособие (включая детей). Гостиная может включать легкие закуски и ежедневный континентальный завтрак.Доступ в лаундж не предоставляется в отелях следующих брендов: The Ritz-Carlton, St. Regis, EDITION, The Luxury Collection, W Hotels, Design Hotels, Tribute Portfolio, Gaylord Hotels, Four Points, SpringHill Suites, Protea Hotels, Fairfield, AC Hotels. , Aloft, Moxy Hotels, Residence Inn, TownePlace Suites, Element, Marriott Vacation Club, Marriott Grand Residence Club и участвующие отели Vistana. Это преимущество распространяется только на один (1) номер, в котором проживает участник со статусом Platinum Elite.А. В США и Канаде: Если лаунж-зона Отеля-участника закрыта или в отеле нет лаунж-зоны или утвержденной альтернативы, отель будет предлагать ежедневный континентальный завтрак в ресторане для Участника и одного (1) гостя, или Участник может выбрать 750 баллов за ночь проживания. В Европе: Участвующие отели без лаунджа или утвержденной альтернативы предлагают ежедневный завтрак в ресторане для участника и одного (1) гостя, или участник может выбрать 750 баллов за ночь проживания.Это преимущество распространяется на следующие бренды (за исключением курортной недвижимости): JW Marriott, Marriott Hotels, Delta Hotels, Autograph Collection и Renaissance Hotels. Эта привилегия не действует, если завтрак включен в стоимость или бренд предлагает утвержденную альтернативу, как описано выше. В следующих отелях в США не предоставляется бесплатный континентальный завтрак в ресторане отеля, если лаунж-зона закрыт, но предлагается 1000 баллов вместо завтрака. Эти свойства включают в себя:
● The Algonquin Hotel Times Square, Autograph Collection
● Boston Marriott Copley Place
● Boston Marriott Long Wharf
● Chicago Marriott Downtown Magnificent Mile
● JW Marriott Essex House New York City
● JW Marriott New Orleans
● JW Marriott San Francisco Union Square
● JW Marriott Washington, DC
● The Lexington Hotel, Autograph Collection
● Monterey Marriott
● New York Marriott Marquis®
● Philadelphia Marriott Downtown
● Renaissance Boston Waterfront Hotel
● Renaissance Chicago Downtown Hotel
● Renaissance Los Angeles Airport Hotel
● Renaissance New York Midtown Hotel
● Renaissance New York Times Square Hotel
● Renaissance Washington, DC Downtown Hotel
● Marriott Marquis San Diego MarinaБ.
За пределами США и Канады в отелях Courtyard с лаунджем завтрак подается в ресторане, когда лаундж закрыт.C. В соответствии с разделом 4.1.c., если доступ в зал ожидания (или альтернативы или исключения, как указано выше) недоступен, участникам со статусом Platinum Elite будет выплачена компенсация в размере 100 долларов США за неудобства. Участвующие объекты за пределами США будут платить эквивалентную сумму в местной валюте. Эта гарантия предоставляется в отелях следующих брендов: JW Marriott, Marriott Hotels, Delta Hotels, Autograph Collection Hotels и Renaissance Hotels.
ГАРАНТИРОВАННЫЙ ДОСТУП В ЗАЛ
Участвующие бренды
Предложение для гостиной
Компенсация гостю*
JW Marriott, отели Marriott, отели Delta, Autograph Collection, отели Renaissance
(кроме курортов)
США и Канада: если лаунж-зона закрыта или в отеле нет лаунж-зоны или утвержденной альтернативы, отель предлагает ежедневный континентальный завтрак в ресторане для участника +1 или участник может выбрать 750 баллов за ночь пребывания
Европа: отели без лаунджа или утвержденной альтернативы предлагают ежедневный завтрак в ресторане для участника +1 или участник может выбрать 750 баллов за ночь проживания
Глобально: U. не был предложен континентальный завтрак или альтернатива континентальному завтраку. 100 сингапурских долларов, если участникуВнутренний двор
(за пределами США и Канады с залом ожидания)
Если лаундж закрыт, отель-участник предложит завтрак в ресторане .н/д Шератон, Ле Меридиен, Вестин
(Курорты включены)
Альтернатива не предлагается, когда бизнес-зал закрыт н/д *Участвующие объекты за пределами США будут платить эквивалентную сумму в своей местной валюте.
против 16:00 Поздний выезд . Участники со статусом Platinum Elite и выше могут выехать до 16:00. местное время Участвующего объекта. Участники могут запросить поздний выезд при бронировании через централизованное резервирование, при регистрации, через мобильное приложение (если оно доступно) или в любое время во время своего пребывания.
Эта привилегия гарантирована во всех отелях-участниках, за исключением курортных и конференц-отелей, а также дизайнерских отелей TM , где она предоставляется при наличии возможности.Это преимущество не распространяется на отели Marriott Vacation Club, Marriott Grand Residence Club и Vistana.в.и. Ежегодная привилегия выбора на 50 ночей. Участник со статусом Platinum Elite, набравший пятьдесят (50) соответствующих критериям элитных суток в течение календарного года («Соответствующий период»), имеет право на получение одной (1) дополнительной выгоды («Ежегодная привилегия выбора на 50 суток») из списка доступные привилегии на сайте selection-benefit.marriott.com и показаны ниже:
Платиновый элитный 50-дневный ежегодный выбор привилегий :
Награда за пять (5) ночей в люксе
Скидка 40% на кровать
$100 Благотворительное пожертвование
Подарок статуса Silver Elite другу или члену семьи
Пять (5) кредитов на элитные сутки
Список 50-дневных ежегодных привилегий выбора на выбор-преимущество.
Сайт marriott.com может быть изменен в любое время. Как только участник со статусом Platinum Elite получает право на получение ежегодного привилегии на выбор в течение 50 ночей, он/она должен выбрать ежегодное привилегию на выбор в течение 50 ночей, посетив сайт selection-benefit.marriott.com и выбрав один из привилегий на выбор в течение 50 ночей. Преимущества. Выбор должен быть сделан на сайте selection-benefit.marriott.com и не может быть сделан через службу поддержки участников. Все выбранные ежегодные льготы на выбор за 50 ночей являются окончательными и не могут быть изменены после того, как они были сделаны. В случае, если правомочный участник со статусом Platinum Elite не выберет ежегодное преимущество на выбор в течение 50 ночей до 23:59.м. По восточному времени США 7 января года, следующего за применимым квалификационным периодом, такие участники со статусом Platinum Elite получат пять (5) наград Suite Night Awards™ в качестве своей ежегодной льготы на выбор в течение 50 ночей ( «Suite Night Awards», индивидуально Премия «Люкс Ночь» ).A. Сертификаты на сутки в люксе можно использовать для заранее подтверждаемого повышения класса обслуживания в избранных номерах премиум-класса или стандартных люксах из расчета на номер за ночь при наличии мест и применимых условиях, изложенных ниже для сертификатов на сутки в люксах:
(1) Сертификаты на сутки в люксе истекают 31 декабря года, следующего за годом, в котором они были получены.Например, если в 2022 году набрано 50 или 75 соответствующих критериям ночей и в качестве ежегодной привилегии выбора участника выбрано пять премиальных суток в люксе, срок действия пяти премиальных суток в люксе истекает 31 декабря 2023 года.
(2) Сертификаты на сутки в люксе можно использовать только при оплачиваемом проживании, соответствующем требованиям Программы лояльности, а также при проживании в рамках сертификата «Бесплатные сутки» и проживании с наличными и баллами.
(3) Участник может запросить использование своих сертификатов на сутки в люксе на веб-сайтах Программы лояльности или позвонив в Центр взаимодействия с клиентами.
(4) Сертификаты на сутки в люксе можно использовать только для стандартных люксов или других номеров премиум-класса, указанных Отелем-участником.
(5) Использование премиального люкса на ночь зависит от наличия запрошенного люкса или номера премиум-класса. Проверка доступности начинается за пять (5) дней до прибытия. Если наличие мест не подтверждено за пять (5) дней до прибытия, их наличие проверяется каждый день до прибытия до 14:00. по местному времени Отеля-участника за один (1) день до прибытия.Если к этому времени сертификаты на сутки в люксе не могут быть подтверждены, они возвращаются на счет участника.
(6) Сертификаты на сутки в люксе можно использовать только в том случае, если их достаточно на счете участника, чтобы они применялись к каждой ночи бронирования.
(7) Для каждого номера в сутки требуется награда за одну ночь проживания в люксе.
(8) Сертификаты на сутки в люксе требуются за каждую ночь проживания, включая любые ночи, которые могут быть обозначены как «бесплатные», например, Премия «Пребывание для 5 по оплате за 4».
(9) Сертификаты на сутки в люксе нельзя передавать, дарить или использовать при бронировании нескольких номеров; тем не менее, участник может использовать сертификаты на сутки в люксе для дополнительных бронирований одноместного номера во время своего пребывания, если участник присутствует во время пребывания и другие бронирования оформлены на имя участника.
(10) Участники, которые бронируют отдельные бронирования на последовательные ночи, которые предшествуют или следуют за бронированием, для которого были подтверждены сертификаты на сутки в люксе, должны будут изменить номер на подтвержденный тип номера в любую ночь (ночи), когда не используется сертификат на сутки в люксе.
(11) Если участвующий отель предлагает несколько вариантов номеров для получения награды Suite Night Award, после выбора люкса/номера премиум-класса выбор может быть изменен до 14:00. по местному времени Отеля-участника за день до прибытия, если не подтверждена награда за номер в люксе на ночь.
Подтвержденные сертификаты на сутки в люксе могут быть отменены до 14:00. по местному времени Отеля-участника за один (1) день до прибытия, только если бронирование полностью отменено.(12) Награды на сутки в люксе имеют правила запроса, бронирования, отмены и изменения, которые дополняют, но полностью отделены от правил бронирования, отмены и изменения для бронирований, для которых они используются.
(a) Запросы на использование сертификатов на сутки в люксе при бронировании можно подавать до 14:00. по местному времени Отеля-участника за один (1) день до прибытия.
(b) Запросы на отмену использования неподтвержденных сертификатов на сутки в люксе можно подавать до 14:00. по местному времени Отеля-участника за один (1) день до прибытия.
(c) Подтвержденные сертификаты на сутки в люксе могут быть отменены до 14:00. по местному времени Отеля-участника за один (1) день до прибытия, только если бронирование полностью отменено.
(d) После подтверждения сертификатов на сутки в люксе участник должен отменить все бронирование, чтобы получить возврат всех сертификатов на сутки в люксе.
Отмена подтвержденного бронирования Suite Night Award после 14:00. по местному времени Отеля-участника за один (1) день до прибытия приведет к аннулированию всех наград за сутки в люксе, применимых ко всему бронированию.(e) Награды за сутки в люксе не могут быть применены к бронированию после регистрации бронирования в отеле-участнике.
(f) Если участник покидает свое бронирование досрочно, все неиспользованные сертификаты на сутки в люксе, подтвержденные для проживания, будут аннулированы.
(g) Если участник продлевает свое бронирование и имеет достаточно сертификатов на сутки в люксе, чтобы покрыть продление, участник может использовать свои сертификаты на сутки в люксе в зависимости от наличия возможности и по усмотрению отеля-участника.
(13) Не все отели-участники участвуют в программе Suite Night Awards. Награды Suite Night Awards нельзя использовать в отелях следующих брендов: The Ritz-Carlton, The Ritz-Carlton Reserve, The Ritz-Carlton Destination Club, The Ritz-Carlton Residences, EDITION, Protea Hotels, Aloft, Element, Design Hotels™, все- Suite Hotels, Marriott Executive Apartments, Marriott Vacation Club, Marriott Grand Residence Club, Vistana и All-Inclusive Resorts.
Кроме того, сертификаты на сутки в люксе нельзя использовать в некоторых отелях-участниках. Свяжитесь с Центром по работе с клиентами, чтобы получить награду за участие в программе Property Suite Night Award.B. Скидка 40% Кровать . Скидка 40 % на матрас и пружинный блок в магазинах Marriott Retail Brands
(1) После того, как участник со статусом Platinum Elite выберет скидку 40 % на матрас и пружинный блок в качестве годовой льготы на выбор со статусом Platinum Elite, он/она получит промокод, который можно использовать для получения скидки 40 % от полной розничной стоимости. на любой из следующих матрасов и пружинных блоков Marriott Retail Brands:
● Кровать EDITION
● Кровать Ritz-Carlton
● Кровать The Luxury Collection
● Кровать St.Кровать Regis
● Кровать The W Hotels
● Кровать JW Marriott
● Кровать Marriott
● Кровать Sheraton
● Кровать The Westin Heavenly®
● Кровать The Renaissance
● Кровать The Gaylord Hotels
● Кровать The Courtyard
● The Кровать Four Points
● Кровать Fairfield
(2) Промокод со скидкой 40% на матрасы и пружинные блоки Marriott Retail Brands не подлежит возврату и передаче другому лицу.
(3) Промокод не может быть продублирован или продан и не имеет денежной стоимости.Если Программа лояльности подозревает, что использование или активация промокода были ошибочными, мошенническими, незаконными или нарушающими настоящие Условия и положения о скидке 40 % на матрасы и пружинные блоки Marriott Retail Brands или Правила программы, Программа лояльности оставляет за собой право право удерживать или вычитать промокод или соответствующий кредит. Действие промокода может быть прекращено или изменено в любое время без каких-либо обязательств перед Программой лояльности. Промокод будет использоваться по прямому назначению и в законных целях, а также в соответствии с настоящими Условиями и положениями о скидке 40 % на матрасы и пружинные блоки Marriott Brands и Правилами программы.Промокод недействителен там, где это запрещено законом. Промокод действует только на одну покупку.
(4) Промокод со скидкой 40% на матрасы и пружинные блоки Marriott Retail Brands не суммируется с другими предложениями.
Промокод со скидкой 40 % на матрасы и пружинные блоки Marriott Brands предназначен для одноразового использования и не подлежит передаче другим лицам. Только участник со статусом Platinum Elite, выбравший скидку 40 % на матрасы и пружинные блоки Marriott Brands в качестве годовой привилегии на выбор элитного платинового уровня, сможет воспользоваться промокодом на скидку 40 % на матрасы и пружинные матрасы Marriott Brands.(5) Чтобы воспользоваться скидкой 40 % на матрас и пружинный блок любого из брендов компании Marriott Retail в США, позвоните по телефону (800) 311-0708 с понедельника по пятницу с 9:00 до 22:00. ET, а также в субботу и воскресенье с 9:00 до 16:00. ЭТ; в Европе, на Ближнем Востоке и в Африке звоните по телефону +33 1 41 51 51 53 с понедельника по пятницу с 9:00 до 18:00. среднеевропейское время; в Азии (за пределами материкового Китая), Австралии, на островах Тихого океана звоните по телефону +86 21 6151 4628 с понедельника по пятницу с 9:00 до 20:00.м. и 18:00 КНТ; в материковом Китае звоните по телефону +86 400 627 6876 с понедельника по пятницу с 9:00 до 18:00.
КНТ. Подготовьте промокод и номер учетной записи участника со статусом Platinum Elite.(6) Перед отправкой соответствующего товара Компания оставляет за собой право проверить, что лицо, использующее промокод со скидкой 40 % на матрасы и пружинные блоки Marriott Retail Brands, является участником, получившим ежегодную привилегию выбора уровня Platinum Elite перед отправкой. применимый товар.
(7) Стоимость доставки не включена и зависит от региона. Каркасы кроватей не входят в комплект, и на них не распространяется промокод на скидку 40% на матрасы и пружинные блоки Marriott.
(8) Промокод на скидку 40% на матрасы и пружинные блоки Marriott Retail Brands действителен до 31 декабря года, следующего за годом, в котором было получено ежегодное преимущество выбора.
C. Благотворительное пожертвование в размере 100 долларов США. Участник со статусом Platinum Elite, набравший пятьдесят (50) соответствующих критериям элитных суток в год, и участник со статусом Titanium Elite, набравший семьдесят пять (75) соответствующих критериям элитных суток в год, могут выбрать благотворительное пожертвование в размере 100 долларов США в качестве ежегодной льготы на выбор и выбрать один из следующих вариантов: один из следующих вариантов:
(1) Арне М.
Sorenson Hospitality Fund — пожертвование в размере 100 долларов США от Программы лояльности Marriott Bonvoy® в Фонд гостеприимства Арне М. Соренсона США не является облагаемым налогом взносом для соответствующих критериям участников Marriott Bonvoy Elite, которые выбрали это пожертвование в качестве своей ежегодной льготы по выбору. Программа лояльности не может указывать или иным образом гарантировать, как Фонд гостеприимства Арне М. Соренсона потратит пожертвование в размере 100 долларов США. Все средства переводятся из Программы лояльности в Американский фонд поддержки Арне М.Фонд гостеприимства Соренсона.(2) ЮНИСЕФ, d/b/a «ЮНИСЕФ США» — пожертвование в размере 100 долларов США от Программы лояльности Marriott Bonvoy® в Фонд США для ЮНИСЕФ, d/b/a «ЮНИСЕФ США», не является облагаемым налогом взносом. для соответствующих требованиям участников Marriott Bonvoy Elite, выбравших это пожертвование в качестве ежегодной льготы на выбор. Программа лояльности не может указывать или иным образом гарантировать, как ЮНИСЕФ США или ЮНИСЕФ будет расходовать пожертвование в размере 100 долларов США.
Все средства из Программы лояльности переводятся в США.Фонд ЮНИСЕФ. ЮНИСЕФ не поддерживает какую-либо компанию, бренд, продукт или услугу.(3) World Wildlife Fund, Inc. — пожертвование в размере 100 долларов США от программы лояльности Marriott Bonvoy® в пользу World Wildlife Fund, Inc. не является облагаемым налогом взносом для соответствующих критериям участников Marriott Bonvoy Elite, которые выбирают это пожертвование в качестве своего ежегодного выбора. Выгода. Программа лояльности не может указывать или иным образом гарантировать, как Всемирный фонд дикой природы будет расходовать пожертвование в размере 100 долларов США. Все средства переводятся из Программы лояльности во Всемирный фонд дикой природы.Название и эмблема Всемирного фонда дикой природы используются с его разрешения, что никоим образом не означает одобрения, явного или подразумеваемого, какого-либо продукта, услуги, компании, мнения или политической позиции. WWF® и ©1986 Panda Symbol принадлежат WWF. Все права защищены.
D. Подарочный элитный статус
(1) Участник со статусом Platinum Elite, набравший пятьдесят (50) соответствующих критериям элитных суток в год, может подарить статус Silver Elite, а участник с статусом Titanium Elite, набравший семьдесят пять (75) соответствующих критериям элитных суток в год, может подарить статус Gold Elite.
(2) Преимущество подарочного элитного статуса может быть предоставлено только Участнику, который еще не достиг элитного статуса в течение текущего Соответствующего критериям Года статуса.
(3) Статус учетной записи Участника, которому предоставлено преимущество элитного статуса, будет повышен в течение сорока восьми (48) часов с момента получения подтверждения выбора получателя. Такой участник будет сохранять свое элитное членство как минимум в течение полного календарного года. Например, если участнику предоставляется привилегия статуса Silver Elite в течение 2022 г., когда соответствующий критериям статусный год, участник станет участником Silver Elite на оставшуюся часть 2022 г.
, весь 2023 г., а также январь и февраль 2024 г.Минимальное требование уровня Silver Elite должно быть достигнуто в последующий соответствующий критериям календарный год, чтобы оставаться участником уровня Silver Elite в течение календарного года, следующего за таким последующим годным статусным годом, в противном случае участник будет понижен до следующего уровня в марте календарного года, следующего за таким соответствующим правомочному году. Год статуса. В приведенном выше примере это означает, что для того, чтобы участник продолжал иметь статус Silver Elite после февраля 2024 года, он должен выполнить минимальные требования уровня Silver Elite в течение 2023 года, соответствующего критериям статуса, чтобы продолжать оставаться участником уровня Silver Elite после февраля. 2024 Года приемлемого статуса.(4) Ни при каких обстоятельствах Программа лояльности не будет предоставлять сведения о членстве или личную информацию об Участниках Участнику, предоставившему привилегию одаренного статуса, или получателю привилегии одаренного статуса, чтобы способствовать получению привилегии одаренного статуса.
(5) Если желаемый получатель статусной привилегии в подарок в настоящее время не является Участником, желаемый получатель должен зарегистрироваться на сайте marriottbonvoy.com/join, прежде чем ему/ей будет предоставлена привилегия в виде подарочного статуса.
E. Пять элитных ночей в кредит
(1) После того, как участник со статусом Platinum Elite выберет пять кредитов на элитные сутки в качестве своей ежегодной льготы на выбор, участник со статусом Platinum получит на свой счет участника пять (5) бонусных элитных суток, которые учитываются при получении элитного статуса и Пожизненный элитный статус. Элитные ночи и статус элитного членства регулируются Правилами программы в разделе 4.2.b.
(2) Пять (5) элитных суток будут отражены на счете участника в течение сорока восьми (48) часов с момента получения подтверждения о выборе ежегодного преимущества на выбор.
(3) Элитные сутки, которые присуждаются правомочному участнику со статусом Platinum Elite в качестве ежегодной привилегии на выбор для участника со статусом Platinum Elite, будут начислены в год соответствующего критериям статуса, за который были заработаны элитные сутки, независимо от того, когда участник со статусом Platinum Elite выбирает Five Elite.
Ночные кредиты в качестве ежегодной льготы на выбор. Во избежание сомнений, отвечающим критериям календарным годом, в котором зарабатывается ежегодное преимущество выбора, является соответствующий критериям календарный год, за который элитные ночи будут начислены для получения статуса элитного членства.vii. Гарантированный тип номера . Гарантированный приоритет для запрошенного вами типа номера в участвующих брендах, перечисленных ниже, если ваш квалификационный элитный уровень и конкретные предпочтения указаны в бронировании на ваше пребывание (подушка, расположение номера, дополнительная кровать, запросы на детскую кроватку и т. д. не включены в Гарантию). . Участник со статусом Platinum Elite или выше, совершивший бронирование в тот же день, когда он/она планирует прибыть в отель, не имеет права на получение привилегии гарантированного типа номера.За пределами США, Канады и Европы: предпочтения для курящих/некурящих также могут иметь приоритет в зависимости от наличия; точные размеры кроватей могут различаться, и только элитные участники Titanium и Ambassador будут иметь гарантированный приоритет для запрашиваемого типа кровати и номера.
Преимущество гарантированного типа номера не распространяется на повышение категории номера. Гарантированный тип номера недоступен в отелях The Ritz-Carlton, St. Regis, EDITION, Marriott Vacation Club, Marriott Grand Residence Club, Design Hotels™ и Vistana.Гарантированный тип номера предлагается в отелях следующих брендов: The Luxury Collection, W Hotels, JW Marriott, Marriott Hotels, Sheraton, Delta Hotels, Le Méridien, Westin, Autograph Collection, Renaissance Hotels, Tribute Portfolio, Gaylord Hotels, Courtyard, Four Points, SpringHill Suites, Protea Hotels, Fairfield, AC Hotels, Aloft, Moxy, Residence Inn, TownePlace Suites и Element.viii. В соответствии с разделом 4.1.c. Участники со статусом Platinum Elite и выше имеют право на получение компенсации гарантированного типа номера в любом участвующем бренде, указанном выше.
A. Если участвующий отель не может воспользоваться этим преимуществом гарантированного типа номера, участники со статусом Platinum Elite и выше получат компенсацию (см.
ниже):ГАРАНТИРОВАННЫЙ ТИП НОМЕРА
Участвующие бренды
Компенсация гостю*
The Luxury Collection, W Hotels, JW Marriott, Marriott Hotels, Sheraton, Delta Hotels, Le Méridien, Westin, Autograph Collection, Renaissance Hotels, Tribute Portfolio, Gaylord Hotels У.100 долларов США
AC Hotels, Courtyard, Four Points, SpringHill Suites, Protea Hotels, Residence Inn 50 долларов США
Fairfield, Aloft, Moxy Hotels, TownePlace Suites, Element 25 долларов США
*Участвующие объекты за пределами США будут платить эквивалентную сумму в своей местной валюте.
икс. Специальная элитная поддержка для участников со статусом Platinum Elite (только для США и Канады: (800) 228-2100)
4.3.д. Преимущества членства Marriott Bonvoy Titanium Elite . В дополнение ко всем преимуществам, которые получают участники Platinum Elite, участники Titanium Elite и выше имеют право на получение следующих преимуществ:
я. 75% бонусных баллов . Бонусные баллы зависят от уровня элитного членства и рассчитываются на основе базовых баллов, заработанных во время пребывания. Доступно для элитных участников во всех участвующих брендах, если иное не указано в разделе 1.2.a.
ii. Гарантированная доступность в течение 48 часов .Ограничено личным номером члена Titanium Elite. Гарантированная доступность номера при бронировании не менее чем за 48 (сорок восемь) часов до прибытия и доступна после распродажи Участвующего объекта, если номер забронирован до 15:00. по местному времени, за сорок восемь (48) часов до прибытия, во всех участвующих отелях, кроме курортных отелей, Marriott Vacation Club, Marriott Grand Residence Club, Design Hotels™ и Vistana.
Гарантированная доступность в течение сорока восьми (48) часов может быть недоступна в определенные ограниченные даты (например,г., особые события). Привилегии Enhanced Room Upgrade не применяются. Преимущество не может быть использовано в сочетании с использованием сертификата «Бесплатные сутки» или любого типа рекламных акций или тарифов со скидкой. Участник должен оплатить преобладающий тариф во время бронирования, а также должны быть соблюдены требования к продолжительности пребывания. Для Residence Inn и TownePlace Suites гарантированная доступность в течение 48 часов распространяется только на номера-студио.III. Ежегодная привилегия выбора на 75 ночей. Участник со статусом Titanium Elite, набравший семьдесят пять (75) элитных суток в течение календарного года («Соответствующий период»), имеет право на получение одного (1) дополнительного преимущества («Ежегодное преимущество выбора на 75 суток») от список доступных преимуществ на выбор-выгода.marriott.com и показано ниже:
Варианты привилегий на выбор на 75 ночей Titanium Elite Annual Choice :
Награда за пять (5) ночей в люксе
Скидка 40% на кровать
$100 Благотворительное пожертвование
Подарок статуса Gold Elite другу или члену семьи
Пять (5) кредитов на элитные сутки
Одна (1) бесплатная ночь в подарок
Список 75-дневных ежегодных привилегий на выбор по выбору.
Сайт marriott.com может быть изменен в любое время. Как только участник Titanium Elite получает право на получение ежегодного привилегии на выбор в течение 75 ночей, он/она должен выбрать годовой привилегии на выбор в течение 75 ночей, посетив сайт selection-benefit.marriott.com и выбрав один из привилегий на выбор в течение 75 ночей. Преимущества. Выбор должен быть сделан на сайте selection-benefit.marriott.com и не может быть сделан через службу поддержки участников. Все выбранные варианты ежегодного преимущества выбора на 75 ночей являются окончательными и не могут быть изменены после того, как они были сделаны. В случае, если соответствующий участник программы Titanium Elite не выберет годовую привилегию на выбор в течение 75 ночей до 23:59.м. По восточному времени США 7 января года, следующего за соответствующим квалификационным периодом, такие участники Titanium Elite получат пять (5) наград Suite Night Awards™ в качестве своего ежегодного привилегии выбора на 75 ночей («Suite Night Awards», по отдельности «Suite Night Awards» награда»). Положения и условия для каждого варианта 75-Annual Choice Benefit перечислены в разделе 4.3.c.(vi), за исключением следующего:A. Одна бесплатная ночь в подарок
(1) Премией «Бесплатная ночь» (до 40 000 баллов) необходимо воспользоваться для проживания, которое происходит не позднее 31 декабря года, следующего за годом, в котором выбрана дополнительная привилегия (например,г. если льгота выбрана в 2022 году, крайний срок погашения — 31 декабря 2023 года).
(2) Награда за бесплатные сутки будет зачислена на счет участника с элитным статусом Titanium в течение двух (2) недель после того, как участник с элитным статусом Titanium выберет этот вариант в качестве ежегодной льготы на выбор. Награду на бесплатную ночь можно использовать в любом доступном Отеле-участнике на одну (1) ночь, до 40 000 баллов, для стандартного номера.
(3) Участники могут использовать свою награду при бронировании соответствующего критериям пребывания с использованием награды на веб-сайтах Marriott или они могут позвонить в Центр взаимодействия с клиентами и указать, что они хотят использовать свою награду на бесплатные сутки.
Награда на бесплатные сутки не подлежит передаче и не может быть обменена на наличные деньги или конвертирована в баллы. Любая неиспользованная награда за бесплатные сутки будет аннулирована. Пребывание и ночь в рамках сертификата «Бесплатные сутки» учитываются при получении статуса элитного участника. Награды на бесплатные сутки можно комбинировать и добавлять к существующим оплаченным проживаниям или пребываниям на основе наград на бесплатные сутки.(4) Премия «Бесплатная ночь» включает все применимые налоги; однако участник Titanium Elite может нести ответственность за уплату дополнительных обязательных курортных сборов в отелях-участниках, где применяются курортные сборы.
(5) Использование сертификата на бесплатные сутки может быть отменено в соответствии со стандартной гарантией и политикой отмены, как описано в Разделе 3.2.c.
(6) Подходящий участник Программы лояльности должен проверить свою учетную запись участника, чтобы подтвердить дату истечения срока действия его/ее награды в виде бесплатных суток.
(7) Стоимость любых наград в виде бесплатных суток, которые ранее были присуждены участникам программы Legacy SPG в качестве годовой привилегии на выбор и которые еще не были использованы, изменилась и теперь составляет до 40 000 баллов, и срок их действия останется прежним.
ив. Специальная элитная поддержка для участников Titanium Elite (только для США и Канады: (800) 399-4229)
4.3.д. Преимущества элитного членства Marriott Bonvoy Ambassador. Преимущества элитного членства Marriott Bonvoy Ambassador. В дополнение ко всем преимуществам, которые получают участники со статусом Titanium Elite, участники со статусом Elite, набравшие 100 соответствующих критериям ночей и 20 000 долларов США в год в соответствии с критериями расходов на основе соответствующих критериям расходов, полученных за совершенные пребывания в соответствующий критериям период (не включают соответствующие критериям расходы, сделанные заранее за пребывание в течение года (лет), следующего за Отвечающим требованиям периодом, например, при проживании с предоплатой), имеют право на получение следующих льгот:
я.
Посольская служба . Участник уровня Ambassador Elite имеет право участвовать в качестве посла в течение соответствующего статусному году и продолжать в течение следующего календарного года. Услуга посла — это преимущество, которое позволяет соответствующему Участнику получать определенные дополнительные преимущества, как описано здесь.ii. Ваш24 ™. Члены Ambassador Elite имеют право участвовать в Your24 в течение соответствующего статусному году и продолжать в течение следующего календарного года.Your24 — это преимущество, которое позволяет правомочному участнику запрашивать определенное время регистрации для любого предстоящего пребывания в любом участвующем отеле. Если запрошенное время регистрации подтверждено, время регистрации отъезда будет установлено на то же время в день отъезда.
A. Привилегии Your24 могут быть запрошены, когда правомочный элитный участник программы Ambassador запрашивает конкретное время регистрации заезда и отъезда для проживания через своего представителя.
Привилегии Your24 также могут быть запрошены правомочным элитным участником программы Ambassador для предстоящего пребывания в любое время до 15:00.м. (по местному времени Отеля-участника) за два (2) дня до прибытия для такого пребывания, связавшись с его/ее послом. Если запрос на льготы Your24 будет одобрен, ваш представитель свяжется с вами и подтвердит время регистрации заезда и отъезда.B. Преимущества Your24 зависят от наличия возможности и могут быть запрошены только в связи с пребыванием.
C. Привилегии Your24 ограничены одним (1) номером на одного правомочного Участника за пребывание независимо от того, сколько номеров было забронировано.
D. Если для элитного члена Ambassador утверждено время регистрации заезда с 9:00 до 16:00. (по местному времени Отеля-участника) он/она может запросить привилегию позднего выезда Платинового элитного и выше.
E. Если определенный тип номера, забронированный правомочным Участником, недоступен при регистрации, Участвующий отель удовлетворит подтвержденный запрос Your24, временно предоставив другой номер, а затем однократно переместив соответствующих гостей в забронированный тип номера.
доступный.F. Marriott Vacation Club, Marriott Grand Residence Club, Design Hotels™, Vistana properties, The Ritz-Carlton Residences, Waikiki Beach, The Cosmopolitan of Las Vegas и Atlantis, Paradise Island, Bahamas не предоставляют льготы Your24.
4.5.2 Визуализация графика прямоугольников и усов
Три графика с прямоугольниками и усами на диаграмме 4.5.2.1 были созданы с использованием программного обеспечения R. Что вы можете сказать о трех дистрибутивах?
Таблица данных для диаграммы 4.5.2.1 ВТаблица данных для схемы 4.5.2.1
Сводка таблицы
В этой таблице отображаются результаты таблицы данных для диаграммы 4.5.2.1. Информация сгруппирована по измерениям (появляются в виде заголовков строк), распределению A, распределению B и распределению C (появляются в виде заголовков столбцов).Измерение Распределение А Распределение B Распределение C Минимум 0. 000,11 0,14 Нижний квартиль (Q1) 0,02 0,37 0,69 Медиана (Q2) 0,11 0,48 0,88 Верхний квартиль (Q3) 0,32 0,58 0,95 Максимум 0.86 0,93 1,00 - Центр распределения A является самым низким из трех распределений (медиана 0,11). Распределение имеет положительную асимметрию, поскольку ус и полубокс длиннее справа от медианы, чем слева.
- Распределение B приблизительно симметрично, поскольку оба полубокса имеют почти одинаковую длину (0,11 с левой стороны и 0,11 с левой стороны и 0,11 с левой стороны).10 справа). Это наиболее концентрированное распределение, поскольку межквартильный размах составляет 0,21 по сравнению с 0,30 для распределения А и 0,26 для распределения С.
- Центр распределения C является самым высоким из трех распределений (медиана 0,88). Распределение C имеет отрицательную асимметрию, поскольку ус и полубокс длиннее слева от медианы, чем справа.
Все три распределения содержат потенциальные выбросы.Возьмем, к примеру, распределение А. Межквартильный диапазон составляет Q3 — Q1 = 0,32 — 0,02 = 0,30. Согласно определению, используемому функцией в программном обеспечении R, все значения, превышающие Q3 + 1,5 x (Q3 — Q1) = 0,32 + 1,5 x 0,30 = 0,77, находятся за пределами правого уса и обозначены кружком.
В распределении A есть два потенциальных выброса.Советы по построению графиков
Так же, как в композиции есть правила грамматики, существуют правила построения графиков, которые помогают визуализировать данные для вашего аудитория.Хорошо спроектированный график не требует особых пояснений, потому что сам график должен делать тенденции в данных визуально очевидными. Хорошо спроектированный график также не нуждается в ненужных украшениях, которые не передают полезную информацию, такую как глубина столбцов на двумерном графике. Каждый из следующих терминов несет в себе важный смысл.
Зависимые и независимые переменные
Представьте, что мы хотим построить график количества количества осадков, выпадающих в разное время года.Количество осадков зависит от времени года, но время года не зависит от количества осадков. Таким образом, количество осадков является зависимой переменной и временем года. является независимой переменной .
На некоторых графиках у вас может быть больше
более одной зависимой переменной, но не более одной независимой
Переменная. Например, вы можете перекрыть графики осадков в
пустыня и осадки в тропиках против времени года, или вы могли бы
график дюймов осадков в 2005 и 2006 годах по сравнению со временем
год.Топоры
Независимая переменная принадлежит оси x (горизонтальная линия) графика, а зависимая переменная принадлежит ось Y (вертикальная линия).Оси x и y пересекаются в точке называется источником , где координаты (0,0). В графики только с положительными значениями для x и y, начало координат находится в нижний левый угол.
Весы
Каждая ось нуждается в шкале, чтобы показать диапазон данные по этой оси. Нижний конец шкалы может быть нулем или круглым числовое значение немного меньше, чем наименьшая точка данных. Высота конец шкалы обычно представляет собой круглое числовое значение, немного превышающее самая большая точка данных.Гамма измеряется в мажоре и миноре отметки .
Обычно шкала идет от низкого к высокому
легко подсчитываются кратные числа, такие как 10, 50, 100 и т. д. Когда графики сравниваются рядом друг с другом, рассмотрите возможность масштабирования их до одного и того же диапазона данных, чтобы упростить сравнение.Этикетки Оси
Каждой оси требуется описательная метка оси указывает, какая переменная представлена. Например, ось Y метка может читаться как «Общее количество осадков», а метка по оси X может читаться «Месяц»
Единицы
Если вы измеряете время, вы должны включить единицы, а также числовые значения, чтобы люди знали, если вы речь идет о секундах, минутах, часах, днях, годах и т.Если ты измеряя количество осадков, люди не поймут, если вы имеете в виду дюймы, миллиметры, галлоны и т. д., если вы не включаете единицы измерения. Единицы должны сообщаться после метки оси, например, «Общее количество осадков (дюймы)».
Точки данных
Обычно каждое независимое измерение представляет собой точку на графике.
Если на одном графике отображается несколько наборов данных, каждый набор должен быть представлен уникальным символом.Линии
Следует ли соединить точки данных линией? Обычно ответ положительный, если точки данных являются, например, частью серии измерений одного и того же объекта за определенный период времени.Подразумевается, что значения не возвращаются к нулю между измерениями. Однако, если вы строите диаграмму рассеяния, вы можете провести линию тренда или линию регрессии через точки, но не соединять каждую из них. В некоторых случаях зависимость может быть не линейной, а экспоненциальной, логарифмической или какой-либо другой математической функцией, поэтому кривая может быть более подходящей, чем линия. Однако должна быть причина, по которой выбрана конкретная кривая.
Легенда
Легенда становится важной при построении графика более одной зависимой переменной.Например, ваша легенда может указывают на то, что зеленые линии или полосы обозначают количество осадков в тропиках.
в то время как коричневые линии или полосы представляют собой осадки в пустыне.
область.Использование цвета
Цвета или узоры должны использоваться, чтобы помочь передать информации, но не должны использоваться просто для украшения. в предыдущий пример, почему были выбраны зеленый и коричневый? Если бы цвета были наоборот, будет ли это лучше или хуже? Почему?
Какое визуальное представление?
Тип данных, которые вы представляете, может быть лучше подходит для одного типа графика, чем для другого.Например, если ваш измерения — это периодические выборки текущего события, например дождя. каждый день, то линия с точками помогает передать это сообщение. Если на с другой стороны, вы сначала усредняете разные единицы времени как месяцы, тогда бары могут работать лучше. Если вы пытаетесь визуально отображать части целого, круговая диаграмма может быть хорошей выбор.
Планки погрешностей
Каждая точка на графике может представлять одну точку данных или среднее значение набора измерений в этой точке.
В этом случае было бы уместно выразить диапазон вариации вокруг этой точки. Обычно ошибка вокруг среднего значения выражается как стандартное отклонение, но при небольших размерах выборки иногда используется стандартная ошибка.Титул
Заголовок должен быть кратким описанием предметом графика, но не должны описывать или интерпретировать Результаты.
Что не включать
График должен включать только элементы, улучшающие интерпретацию, и должен содержать минимум визуальных украшений.Например, столбцы не должны быть трехмерными, если только третье измерение не добавляет информации.
Пример правильно отформатированного График
Глоссарий терминов робототехники | Определения и примеры робототехники
Термины, определения и примеры робототехники
Функция трехмерного графического дисплея
Функция 3D-графического отображения (далее именуемая как Функция 3D-отображения) заключается в том, что 3D-модель робота отображается в окне подвесного программатора, и может быть подтверждено текущее значение робота. Используя функцию многооконного режима, позицию преподавателя, отображаемую в содержании задания, также можно подтвердить в окне 3D-дисплея. Когда функция функциональной безопасности действительна, также может отображаться диапазон функциональной безопасности.Абсолютные данные (данные ABSO)
Абсолютные данные (данные ABSO) — это поправочный коэффициент для данных, который устанавливает указанное значение нуля, когда робот находится в заданном исходном положении (калибровочное положение).Точность
Точность – это измерение отклонения между заданной характеристикой и достигнутой характеристикой (R15.05-2), или точность, с которой может быть достигнуто вычисленное или рассчитанное положение робота. Точность обычно хуже, чем повторяемость руки. Точность не постоянна в рабочей области из-за эффекта кинематики связи.Активный совместимый робот
Активный совместимый робот — это робот, в котором изменение движения во время выполнения задачи инициируется системой управления. Модификация индуцированного движения незначительна, но достаточна для облегчения выполнения желаемой задачи.Фактическое положение
Положение или расположение контрольной точки инструмента. Обратите внимание, что это не будет точно таким же, как положение запроса, из-за множества необнаруженных ошибок, таких как отклонение канала, неравномерность передачи, допуски на длину канала и т. д.Привод
Силовой механизм, используемый для обеспечения движения или поддержания положения робота (например, двигатель, который преобразует электрическую энергию для обеспечения движения робота) (R15.07). Привод реагирует на сигнал, полученный от системы управления.Рычаг
Взаимосвязанный набор звеньев и приводных суставов, состоящий из робота-манипулятора, который поддерживает и/или перемещает запястье и кисть или рабочий орган в пространстве. Сама рука не включает рабочий орган.
См. «Манипулятор», «Эффектор» и «Запястье».Шарнирный манипулятор
Манипулятор с рукой, которая разбита на секции (звенья) одним или несколькими суставами.Каждый из шарниров представляет собой степень свободы в системе манипулятора и допускает поступательное и вращательное движение.Артикуляция
Описывает шарнирное устройство, такое как шарнирный манипулятор. Суставы обеспечивают вращение вокруг вертикальной оси и подъем из горизонтальной плоскости. Это позволяет роботу проникать в ограниченное пространство.Сборочный робот
Робот, специально разработанный для стыковки, подгонки или иной сборки различных деталей или компонентов в готовые изделия.В основном используется для захвата деталей и сопряжения или сборки их вместе, например, на конвейерном производстве.Функция автоматического измерения
Для оптимального движения робота необходимо задать массовые характеристики рабочего органа. Эти свойства могут быть получены из CAD-модели инструмента. Функция автоматического измерения является альтернативой модели САПР и использует саму руку робота для измерения свойств инструмента. С помощью этой функции пользователь может зарегистрировать нагрузку на инструмент, положение центра тяжести инструмента и момент инерции в центре тяжести.Автоматический режим
См. Режим воспроизведения.Ось
Направление, используемое для указания движения робота в линейном или вращательном режиме. (ИСО 8373)Осевые помехи
Зона пересечения осей — это функция, которая оценивает текущее положение каждой оси и выводит сигнал в зависимости от того, находится ли текущее положение в заданном диапазоне.Основание
Стабильная платформа, к которой крепится промышленный робот-манипулятор.Базовая система координат
Базовая система координат (иногда называемая мировой системой координат) определяет общую точку отсчета для ячейки или приложения. Это полезно при использовании нескольких роботов или устройств, поскольку позиции, определенные в базовых координатах, будут одинаковыми для всех роботов и устройств. (см. рисунок справа)Базовое звено
Стационарная базовая конструкция манипулятора робота, поддерживающая первый сустав.Прижигание
Burn-In — это процедура тестирования робота, при которой все компоненты робота работают непрерывно в течение длительного периода времени.Это делается для проверки движения и программирования движения робота на ранних этапах, чтобы избежать сбоев после развертывания.Компьютерное проектирование (САПР)
Компьютерное проектирование (САПР). Компьютерные графические приложения, предназначенные для проектирования объектов (или деталей), которые должны быть изготовлены. Компьютер используется в качестве инструмента для разработки схем и создания чертежей, что позволяет точно производить объект. Система CAD позволяет создавать трехмерные чертежи основных фигур, точно определять размеры и размещение компонентов, создавать линии заданной длины, ширины или угла, а также удовлетворять различным геометрическим формам.Эта система также позволяет проектировщику тестировать моделируемую деталь при различных напряжениях, нагрузках и т. д.Карусель
Вращающаяся платформа, которая доставляет объекты роботу и служит системой очередей объектов. Эта карусель доставляет объекты или заготовки на станцию загрузки/разгрузки робота.Декартовы координаты
Декартовы координаты — это тип системы координат, которая указывает положение точки в двухмерном пространстве с помощью пары числовых чисел, которые дополнительно определяют расстояние до фиксированных осей, перпендикулярных друг другу.Проще говоря, график XY представляет собой двумерную декартову систему координат. Когда точка указана в трехмерном пространстве (график XYZ), она представляет собой трехмерную декартову систему координат. Позиция TCP робота указывается в декартовой координате.Декартовский манипулятор
Декартовский манипулятор — это рука робота с призматическими шарнирами, которая позволяет перемещаться по одной или нескольким из трех осей в системе координат X, Y, Z.Декартова топология
Топология, в которой повсюду используются призматические соединения, обычно расположенные перпендикулярно друг другу.Робот с декартовыми координатами
Робот с декартовыми координатами — это робот, у которого степени свободы руки-манипулятора определяются декартовыми координатами. Это описывает движения восток-запад, север-юг и вверх-вниз, а также вращательные движения для изменения ориентации.Категория 3 (Cat3)
Категория 3 (Cat 3) означает, что связанные с безопасностью части системы управления будут спроектированы таким образом, чтобы:Отдельные неисправности не будут препятствовать правильной работе функции безопасности.
Одиночные отказы будут обнаружены во время или до следующего запроса функции безопасности.
При возникновении единичной неисправности безопасное состояние должно поддерживаться до тех пор, пока обнаруженная неисправность не будет устранена.
Обнаружены все разумно предсказуемые неисправности.
Центробежная сила
Когда тело вращается вокруг оси, отличной от той, что находится в его центре масс, оно оказывает направленную наружу радиальную силу, называемую центробежной силой, на ось, которая удерживает его от движения по прямой касательной.Чтобы компенсировать эту силу, робот должен приложить противодействующий крутящий момент в шарнире вращения.Тип кругового движения
Расчетный путь, который выполняет робот, имеет круглую форму.Зажим
Конечный эффектор, который служит пневматической рукой, управляющей захватом и освобождением объекта. Тактильные датчики и датчики силы с обратной связью используются для управления силой, приложенной к объекту зажимом. См. Конечный эффектор.Зажим
Максимально допустимая сила, действующая на участок тела в результате столкновения робота, при котором период контакта приводит к пластической деформации мягких тканей человека.Зажимное усилие
Когда контакт может привести к зажатию части(ей) тела.Замкнутый контур
Управление осуществляется роботом-манипулятором с помощью информации обратной связи. Когда манипулятор находится в действии, его датчики постоянно передают информацию контроллеру робота, который используется для дальнейшего управления манипулятором в рамках заданной задачи. Многие датчики используются для получения обратной информации о расположении манипулятора, скорости, крутящем моменте, приложенных силах, а также о размещении целевого движущегося объекта и т. д.См. Обратная связь.Коллаборативный робот
Термин, используемый для описания роботизированной системы, предназначенной для работы в одном или нескольких из четырех режимов совместной работы.Интерпретатор команд
Модуль или набор модулей, определяющих, что означает полученная команда. Команда разбивается на части (анализируется) и обрабатывается.
Командная позиция
Положение конечной точки движения робота, которого пытается достичь контроллер.Соответствие
Перемещение манипулятора в ответ на силу или крутящий момент. Высокая уступчивость означает, что манипулятор немного двигается, когда он напряжен. Это называется губчатым или упругим. Низкая комплаентность будет жесткой системой при стрессе.Соответствующий робот
Робот, который выполняет задачи по отношению к внешним силам, изменяя свои движения таким образом, чтобы минимизировать эти силы. Указанное или разрешенное движение осуществляется за счет боковой (горизонтальной), осевой (вертикальной) или вращательной податливости.Конфигурация
Расположение звеньев создается определенным набором совместных позиций на роботе. Обратите внимание, что может быть несколько конфигураций, приводящих к одному и тому же положению конечной точки.Контактный датчик
Устройство, которое обнаруживает присутствие объекта или измеряет величину приложенной силы или крутящего момента, приложенного к объекту при физическом контакте с ним. Контактное зондирование можно использовать для определения местоположения, идентичности и ориентации заготовок.Непрерывный путь
Описывает процесс, при котором робот контролирует весь пройденный путь, в отличие от двухточечного метода обхода. Это используется, когда траектория концевого эффектора наиболее важна для обеспечения плавного движения, например, при окраске распылением и т. Д. См. «Точка-точка».Алгоритм управления
Монитор, используемый для обнаружения отклонений траектории, в котором датчики обнаруживают такие отклонения, и приложения крутящего момента рассчитываются для исполнительных механизмов.Команда управления
Инструкция, подаваемая роботу с помощью устройства ввода «человек-машина». См. Кулон (Обучение). Эта команда принимается системой управления роботом и интерпретируется. Затем исполнительным механизмам робота подается соответствующая инструкция, которая позволяет ему реагировать на первоначальную команду. Во многих случаях команду необходимо интерпретировать с использованием логических единиц и специальных алгоритмов. См. Устройство ввода и Цикл команд.Устройство управления
Любая часть управляющего оборудования, обеспечивающая средства для вмешательства человека в управление роботом или системой роботов, например, кнопка аварийного останова, кнопка запуска или селекторный переключатель.(Р15.06)Режим управления
Средства, с помощью которых инструкции передаются роботу.Управляемость
Свойство системы, благодаря которому входной сигнал может перевести систему из начального состояния в желаемое состояние по предсказуемому пути в течение заданного периода времени.Контроллер
Устройство обработки информации, входными данными которого являются как желаемое, так и измеренное положение, скорость или другие соответствующие переменные процесса, а выходными сигналами являются управляющие сигналы для управляющего двигателя или исполнительного механизма.(Р15.02)Система контроллера
Механизм управления роботом обычно представляет собой компьютер определенного типа, который используется для хранения данных (как о роботе, так и о рабочей среде), а также для хранения и выполнения программ, управляющих роботом. Система Контроллера содержит программы, данные, алгоритмы; логический анализ и различные другие действия по обработке, которые позволяют ему выполняться. См. Робот.Система координат или кадр
.
Система координат (или кадр) определяет исходное положение и ориентацию, от которых можно измерить положение робота.Все положения робота определяются относительно системы координат. Роботы Yaskawa используют следующие системы координат:Центральный процессор (ЦП)
Центральный процессор (ЦП) — это основная печатная плата и процессор системы контроллера.Кубическая интерференционная зона
Эта область представляет собой прямоугольный параллелепипед, параллельный базовой координате, координате робота или координате пользователя. Контроллер YRC1000 оценивает, находится ли текущее положение TCP манипулятора внутри или вне этой области, и выводит это состояние в виде сигнала.Цикл
Однократное выполнение полного набора движений и функций, содержащихся в программе робота. (Р15.05-2)Циклическая система координат
Система координат, которая определяет положение любой точки с точки зрения углового размера, радиального размера и высоты от базовой плоскости. Эти три измерения определяют точку на цилиндре.Цикло-привод
Торговая марка устройства снижения скорости, которое преобразует низкий крутящий момент с высокой скорости в высокий крутящий момент с низкой скоростью, обычно используемое на главной (большей) оси.Цилиндрическая топология
Топология, в которой плечо повторяет радиус горизонтального круга с призматическим соединением для подъема или опускания круга. Не популярен в промышленности.Выключатель «мертвец»
Устаревший термин. См. Включение устройства.Степени свободы
Количество независимых направлений или сочленений робота (R15.07), которые позволили бы роботу перемещать свой концевой эффектор в требуемой последовательности движений.Для произвольного позиционирования необходимо 6 степеней свободы: 3 для положения (влево-вправо, вперед-назад и вверх-вниз) и 3 для ориентации (рыскание, тангаж и крен).Прямой привод
Совместное приведение в действие, в том числе без передаточных элементов (т. е. звено прикручено к выходу двигателя)Простой
Период времени, в течение которого робот или производственная линия останавливаются из-за неисправности или отказа. См. Время работы.Привод
Редуктор скорости (зубчатый) для преобразования низкого крутящего момента высокой скорости в высокий крутящий момент низкой скорости.См. Harmonic Drive, Cyclo Drive и Rotary Vector Drive).Прямая доставка
Способ введения предмета на рабочее место под действием силы тяжести. Обычно желоб или контейнер располагают таким образом, чтобы после завершения работы с деталью она падала или падала в желоб или на конвейер практически без перемещения роботом.Динамика
Изучение движения, сил, вызывающих движение, и сил, обусловленных движением. Динамика манипулятора очень сложна, поскольку она является результатом кинематического поведения всех масс в структуре манипулятора.Кинематика манипулятора робота сложна сама по себе.Аварийный останов
Работа схемы с использованием аппаратных компонентов, которая блокирует все другие элементы управления роботом, отключает привод от исполнительных механизмов робота и вызывает остановку всех движущихся частей. (Р15.06)Переключатель включения
См. Включение устройства.Активирующее устройство
Устройство с ручным управлением, которое при непрерывной активации разрешает движение.Отпускание устройства должно остановить движение робота и связанного с ним оборудования, которые могут представлять опасность. (Р15.06)Энкодер
Устройство обратной связи в руке манипулятора робота, которое передает контроллеру данные о текущем положении (и ориентации руки). Луч света проходит через вращающийся кодовый диск, поверхность которого содержит точный узор из непрозрачных и прозрачных сегментов. Свет, проходящий через диск, попадает на фотодетекторы, которые преобразуют световую картину в электрические сигналы.См. Обратная связь, Управление с обратной связью и Датчик обратной связи.ЭОАТ
См. «Захват» или «Концевой эффектор».Рабочий конец
Вспомогательное устройство или инструмент, специально предназначенный для прикрепления к запястью робота или монтажной пластине инструмента, чтобы позволить роботу выполнять предназначенную ему задачу. (Примеры могут включать: захват, пистолет для точечной сварки, пистолет для дуговой сварки, пистолет для точечного распыления или любые другие инструменты для нанесения.) (R15.06)Конечная точка
Номинальное заданное положение, которого манипулятор попытается достичь в конце траектории движения.Конец дистального звена.Ошибка
Разница между фактическим ответом робота и отданной командой.Возможность расширения
Возможность добавления ресурсов в систему, таких как память, жесткий диск большего размера, новая карта ввода-вывода и т. д.Ограничение внешней силы
Пороговый предел, при котором робот перемещается или сохраняет положение даже при приложении внешних сил (при условии, что силы не превышают пределы, которые могут вызвать ошибку).Обратная связь
Возврат информации от манипулятора или датчика к процессору робота для обеспечения самокорректирующего управления манипулятором.
См. «Контроль обратной связи» и «Датчик обратной связи».Контроль обратной связи
Тип управления системой, получаемый, когда информация от манипулятора или датчика возвращается к контроллеру робота для получения желаемого эффекта робота. См. разделы «Обратная связь», «Управление с обратной связью» и «Датчик обратной связи».Датчик обратной связи
Механизм, посредством которого информация от сенсорных устройств возвращается в блок управления роботом. Информация используется в последующем направлении движения робота. См. Управление с обратной связью и Управление с обратной связью.Гибкость
Способность робота выполнять множество различных задач.Силовая обратная связь
Техника обнаружения, использующая электрические сигналы для управления концевым рабочим органом робота во время работы рабочего органа.Информация подается с датчиков усилия рабочего органа на блок управления роботом во время выполнения конкретной задачи, чтобы обеспечить улучшенную работу рабочего органа.
См. разделы «Обратная связь», «Датчик обратной связи» и «Датчик усилия».Датчик усилия
».
Датчик, способный измерять силы и крутящий момент, прилагаемые роботом и его запястьем. Такие датчики обычно содержат тензодатчики. Датчик предоставляет информацию, необходимую для силовой обратной связи. См. «Принудительная обратная связьРешение для прямой кинематики
Расчет, необходимый для определения положения конечной точки по заданным положениям суставов.Для большинства топологий роботов это проще, чем найти решение обратной кинематики.
Кинематика вперед
Вычислительные процедуры, определяющие, где в пространстве находится рабочий орган робота. Процедуры используют математические алгоритмы вместе с суставными датчиками для определения его местоположения.Рама
Система координат, используемая для определения положения и ориентации объекта в пространстве, а также положения робота в его модели.Блок функциональной безопасности (БФС)
Блок функциональной безопасности (FSU) — это компонент контроллера робота Yaskawa, который обеспечивает программируемые функции безопасности, обеспечивающие совместную работу робота. Поскольку эти функции безопасности являются программируемыми, FSU позволяет свести к минимуму общую площадь оборудования, а также зоны, доступные для человека. FSU состоит из двух параллельных центральных процессоров (ЦП), работающих одновременно, что обеспечивает двухканальную проверку.Кроме того, FSU получает данные о положении робота от своих энкодеров независимо от системы управления движением робота. На основе этой обратной связи FSU отслеживает положение, скорость и позицию манипулятора и инструмента.Портал
Регулируемая подъемная машина, которая скользит по фиксированной платформе или направляющей, либо поднятой, либо на уровне земли по осям X, Y, Z.Портальный робот
Робот с тремя степенями свободы в системе координат X, Y и Z.Обычно состоит из системы намотки (используемой как кран), которая при намотке или размотке обеспечивает движение вверх и вниз по оси Z. Катушка может скользить слева направо по оси, обеспечивающей перемещение по оси Z. Катушка и вал могут перемещаться вперед и назад по направляющим, обеспечивающим движение по оси Y. Обычно используется, чтобы расположить его концевой эффектор над желаемым объектом и поднять его.Гравитационная нагрузка
Сила, направленная вниз из-за веса манипулятора робота и/или нагрузки на конце манипулятора.Сила создает ошибку в отношении точности положения концевого эффектора. Можно рассчитать компенсирующую силу и приложить ее, возвращая руку в желаемое положение.Захват
Концевой эффектор, предназначенный для захвата и удержания (ISO 8373), а также для «захвата» или захвата объекта. Он прикреплен к последнему звену руки. Он может удерживать объект, используя несколько различных методов, таких как: давление между «пальцами», или может использовать намагничивание или вакуум для удержания объекта и т. д.См. Конечный эффектор.Рука
Зажим или захват, используемый в качестве рабочего органа для захвата предметов. См. Концевой эффектор, Захват.Ручное управление
Совместная функция, которая позволяет оператору вручную направлять робота в нужное положение. Эта задача может быть решена за счет использования дополнительного внешнего оборудования, установленного непосредственно на роботе, или с помощью робота, специально разработанного для поддержки этой функции. Оба решения потребуют использования элементов функциональной безопасности.Оценка рисков должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в робототехнической системе.Хармоник Драйв
Компактный легкий редуктор, который преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости. Обычно находится на малой (меньшей) оси.Привязь
Обычно это несколько проводов, соединенных вместе для подачи питания и/или передачи сигналов к устройствам и от них. Например, двигатели робота подключены к контроллеру через жгут проводов.Опасное движение
Непреднамеренное/неожиданное движение робота, которое может привести к травме.Удержание
Остановка всех движений робота во время его последовательности, при которой на роботе сохраняется некоторая мощность. Например, выполнение программы останавливается, однако питание серводвигателей остается включенным, если требуется перезапуск.Исходное положение
Известное и фиксированное положение на основной оси координат манипулятора, где он останавливается, или указанное нулевое положение для каждой оси.Это положение уникально для каждой модели манипулятора. На роботах Motoman® есть индикаторы, которые показывают исходное положение соответствующей оси.МЭК
Международная электротехническая комиссияИндуктивный датчик
Класс бесконтактных датчиков, имеющих половину ферритового сердечника, катушка которого является частью цепи генератора. Когда металлический объект входит в это поле, в какой-то момент объект поглотит достаточно энергии поля, чтобы осциллятор перестал колебаться.Это означает, что объект присутствует в данной близости. См. Датчик приближения.Промышленный робот
Перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материала, деталей, инструментов или специализированных устройств с помощью переменных запрограммированных движений для выполнения различных задач (R15.06). Основными компонентами являются: одна или несколько рук, которые могут двигаться в нескольких направлениях, манипулятор и компьютерный контроллер, который дает подробные инструкции по движению.ИНФОРМ
Язык программирования роботов Yaskawa. Язык INFORM позволяет пользователю робота: дать указание роботу использовать его основные возможности для выполнения определенного набора ожиданий, а также описать роботу посредством определения параметров и условий, каковы ожидания в некоторых заданных ситуациях или сценариях. Проще говоря, язык программирования INFORM позволяет пользователю указывать роботу, что делать, когда делать, где и как делать.Устройства ввода
Разнообразие устройств, позволяющих человеку взаимодействовать с машиной. Это позволяет человеку программировать, управлять и моделировать робота. К таким устройствам относятся подвесной пульт программирования, компьютерные клавиатуры, мышь, джойстики, кнопки, панель оператора, пьедестал оператора и т. д.Инструкция
Строка программного кода, которая вызывает действие со стороны системного контроллера. См. Положение команды.Цикл инструкций
Время, необходимое циклу системы контроллера робота для декодирования команды или инструкции перед ее выполнением.Цикл инструкций должен быть тщательно проанализирован программистами-роботами, чтобы обеспечить быструю и правильную реакцию на изменяющиеся команды.Интегрировать
Чтобы объединить разные подсистемы, такие как роботы и другие устройства автоматизации, или, по крайней мере, разные версии подсистем в одной и той же оболочке управления.Интегратор
Компания, которая предоставляет услуги с добавленной стоимостью, результатом которых является создание решений по автоматизации путем объединения робота и другого оборудования для автоматизации и управления для создания решения по автоматизации для конечных пользователей.Интеллектуальный робот
Робот, который может быть запрограммирован так, чтобы выбор производительности зависел от сенсорной информации практически без вмешательства человека. См. Робот.Зона помех
Зона помех — это функция, предотвращающая помехи между несколькими манипуляторами или между манипулятором и периферийным устройством. Области могут быть установлены до 64 областей. Три типа методов для использования каждой области интерференции: Кубическая интерференция, Вне кубической области и Осевая интерференция.Интерполяция
Метод создания путей к конечным точкам. Как правило, для задания движения определяется несколько узловых точек, прежде чем все промежуточные положения между ними будут вычислены с помощью математической интерполяции. Таким образом, используемый алгоритм интерполяции существенно влияет на качество движения.ИСО
Международная организация по стандартизацииISO 10218-1 Роботы и роботизированные устройства. Требования безопасности для промышленных роботов. Часть 1. Роботы
Спецификация безопасности для конкретного робота, в которой учитываются требования производителя, функциональность, требуемые характеристики безопасности, опасности, меры защиты и документация для самого робота.ISO 10218-2 Роботы и роботизированные устройства. Требования безопасности для промышленных роботов. Часть 2. Роботизированные системы и интеграция
Сопутствующий документ к ISO 10218-1. Эта спецификация безопасности предоставляет руководство как конечным пользователям, так и интеграторам роботов в отношении безопасного проектирования, установки и ввода в эксплуатацию робототехнических систем, а также рекомендуемых процедур, мер безопасности и информации, необходимой для использования.ISO TS 15066 (ANSI RIA 15.606): Роботы и роботизированные устройства. Коллаборативные роботы
Содержит подробное руководство, отсутствующее в частях 1 или 2 стандарта ISO 10218, по безопасному использованию совместно работающих промышленных роботов.Матрица Якоби
Матрица Якоби связывает скорость изменения совместных значений со скоростью изменения координат конечной точки. По сути, это набор алгоритмических вычислений, которые обрабатываются для управления позиционированием робота.РАБОТА
JOB — это название Yaskawa для программы для роботов, созданной с использованием языка программирования роботов INFORM от Yaskawa. Как правило, JOB состоит из инструкций, сообщающих контроллеру робота, что делать, и данных, которые программа использует во время работы.Соединение
Часть системы манипулятора, обеспечивающая вращательную и/или поступательную степень свободы звена рабочего органа.Совместное интерполированное движение
Метод координации движения суставов, при котором все суставы одновременно достигают нужного места. Этот метод сервоуправления создает предсказуемый путь независимо от скорости и приводит к самому быстрому циклу захвата и размещения для конкретного движения.Тип шарнирного движения
Тип движения сустава, также известный как движение «точка-точка», представляет собой метод интерполяции траектории, который управляет движением робота, перемещая каждый сустав непосредственно в заданное положение, чтобы все оси прибывали в это положение одновременно. Хотя путь предсказуем, он не будет линейным.Совместное пространство
а. Совместное пространство (или Совместные координаты) — это просто метод определения положения робота с точки зрения значения каждой оси, а не как положение TCP.Например, исходное положение робота часто определяется в совместном пространстве, когда каждая ось находится под углом 0 градусов.
б. Набор совместных позиций.Соединения
Части манипулятора робота, которые на самом деле изгибаются или двигаются.Кинематика
Связь между движением конечной точки робота и движением суставов. Для декартового робота это набор простых линейных функций (линейные дорожки, которые могут быть расположены в направлениях X, Y, Z), для револьверной топологии (шарниры, которые вращаются), однако кинематика намного сложнее, включая сложные комбинации тригонометрии. функции.Кинематика руки обычно делится на прямое и обратное решения.Захват ковша
Конечный эффектор, который действует как совок. Он обычно используется для сбора жидкости, переноса ее в форму и заливки жидкости в форму. Обычно используется для работы с расплавленным металлом в опасных условиях. См. Конечный эффектор.Лазер
Акроним для усиления света за счет стимулированного излучения. Устройство, которое производит когерентный монохроматический пучок света, который является чрезвычайно узким и сфокусированным, но все же находится в пределах спектра видимого света.Это обычно используется в качестве бесконтактного датчика для роботов. Роботизированные приложения включают в себя: обнаружение расстояния, определение точного местоположения, картографирование поверхности, сканирование штрих-кода, резку, сварку и т. д.Линейное интерполированное движение
Это метод интерполяции траектории, который управляет движением робота, перемещая каждое сочленение в скоординированном движении, так что все оси достигают положения в одно и то же время. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.Тип линейного перемещения
Это метод интерполяции траектории, который управляет движением робота, перемещая каждое сочленение в скоординированном движении, так что все оси достигают положения в одно и то же время. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.Ссылка
Жесткая часть манипулятора, соединяющая соседние суставы.Ссылки
Статический материал, который соединяет суставы руки вместе.Таким образом образуется кинематическая цепь. В человеческом теле звеньями являются кости.Время цикла загрузки
Термин производственного или сборочного процесса, описывающий полное время, необходимое для выгрузки последней заготовки и загрузки следующей.Магнитные детекторы
Датчики роботов, которые могут обнаруживать присутствие ферромагнитного материала. Твердотельные детекторы с соответствующим усилением и обработкой могут определить местонахождение металлического предмета с высокой степенью точности.См. Датчик.Манипулятор
».
Машина или роботизированный механизм, который обычно состоит из ряда сегментов (соединенных или скользящих друг относительно друга) с целью захвата и/или перемещения объектов (деталей или инструментов), обычно с несколькими степенями свободы. Управление манипулятором может осуществляться оператором, программируемым электронным контроллером или любой логической системой (например, кулачковой, проводной и т. д.) (ISO 8373)
См. «Рука, запястье и концевой эффекторРучной режим
См. Режим обучения.Обработка материалов
Процесс, посредством которого промышленный робот-манипулятор перемещает материалы из одного места в другое.Робот для обработки материалов
Робот, спроектированный и запрограммированный таким образом, чтобы он мог обрабатывать, резать, формировать или изменять форму, функцию или свойства материалов, с которыми он работает, между моментом первого захвата материалов и моментом их выпуска в производственный процесс.Функция смещения зеркала
С помощью функции сдвига зеркала задание преобразуется в задание, в котором путь симметричен пути исходного задания.Это преобразование может быть выполнено для указанной координаты из координат X-Y, X-Z или Y-Z координат робота и координат пользователя. Функция смещения зеркала подразделяется на следующие три: функция импульсного смещения зеркала, функция смещения зеркала по координатам робота и функция смещения зеркала по пользовательским координатам. (см. рисунок справа)Переключатель режимов
Согласно стандартам безопасности, промышленный робот имеет три различных режима работы. Это Teach (также называемый Manual), Play (также называемый Automatic) и Remote.Переключение между этими режимами осуществляется с помощью клавишного переключателя на пульте обучения и называется переключателем режимов.Модульность
Свойство гибкости заложено в роботе и системе управления путем сборки отдельных блоков, которые можно легко стыковать или компоновать с другими частями или блоками.Модуль
Автономный компонент пакета. Этот компонент может содержать подкомпоненты, известные как подмодули.Ось движения
Линия, определяющая ось движения либо линейного, либо поворотного сегмента манипулятора.Двигатель
См. Серводвигатель.Приглушение
При тестировании программы робота деактивация любых защитных устройств датчика присутствия в течение всего цикла робота или его части.Автономное программирование
Метод программирования, при котором программа задачи определяется на устройствах или компьютерах отдельно от робота для последующего ввода программной информации в робот. (ИСО 8373)б.Средство программирования робота во время его работы. Это становится важным в производстве и на сборочных линиях из-за поддержания высокой производительности, пока робот программируется для других задач.Оператор
Лицо, назначенное для запуска, контроля и остановки намеченной продуктивной работы робота или робототехнической системы. Оператор также может взаимодействовать с роботом в продуктивных целях. (Р15.06)Оптический энкодер
Датчик обнаружения, который измеряет линейное или вращательное движение, обнаруживая движение маркировки за фиксированным лучом света.Это можно использовать для подсчета оборотов, идентификации деталей и т. д.Оптические датчики приближения
Датчики роботов, которые измеряют видимый или невидимый свет, отраженный от объекта, для определения расстояния. Лазеры используются для большей точности.Ориентация
Угол, образованный большой осью объекта относительно базовой оси. Он должен быть определен относительно трехмерной системы координат. Угловое положение объекта относительно системы отсчета робота.См. раздел «Крен, тангаж и рыскание».Укладка на поддоны
Процесс организованной укладки упаковок (то есть коробок, мешков, контейнеров и т. д.) на поддон.Функция PAM – Регулировка положения вручную
Регулировка положения вручную позволяет регулировать положение с помощью простых операций, наблюдая за движением манипулятора и не останавливая манипулятор. Позиции можно регулировать как в режиме обучения, так и в режиме воспроизведения.Функция параллельного сдвига
Параллельный сдвиг относится к смещению объекта из фиксированного положения таким образом, что все точки внутри объекта перемещаются на одинаковое расстояние.В модели для параллельного сдвига, показанной ниже, значение сдвига может быть определено как расстояние L (смещение в трехмерных координатах). Функция параллельного сдвига имеет отношение к фактической работе манипулятора, поскольку ее можно использовать для уменьшения объема работы, связанной с обучением, за счет смещения обучаемого пути (или позиции). В примере на рисунке ниже обученная позиция A смещается с приращением на расстояние L (на самом деле это трехмерное смещение XYZ, которое может распознать робот).Путь
Непрерывное геометрическое место положений (или точек в трехмерном пространстве), пересекаемое центральной точкой инструмента и описанное в указанной системе координат. (Р15.05-2)Полезная нагрузка — максимальная
Максимальная масса, которой робот может манипулировать с заданной скоростью, ускорением/замедлением, расположением центра тяжести (смещением) и повторяемостью при непрерывной работе в заданном рабочем пространстве. Максимальная полезная нагрузка указана в килограммах.(Р15.05-2)Подвеска [Обучающая подвеска]
Ручное устройство ввода, связанное с системой управления, с помощью которой можно программировать или перемещать робота. (ISO 8373) Это позволяет человеку-оператору стоять в наиболее удобном положении, чтобы наблюдать, контролировать и записывать желаемые движения в память робота.Подвеска Обучение
Отображение и запись положения и ориентации робота и/или системы манипулятора по мере того, как робот постепенно перемещается вручную от начального состояния по пути к конечному целевому состоянию.Положение и ориентация каждой критической точки (суставы, основание робота и т. д.) записываются и сохраняются в базе данных для каждой обученной позиции, через которую проходит робот на своем пути к конечной цели. Теперь робот может повторить путь самостоятельно, следуя пути, хранящемуся в базе данных.Уровень производительности d (PLd)
Уровень эффективности ISO (PL) «d» означает, что средняя вероятность опасного отказа в час связанных с безопасностью частей системы управления находится в пределах от ≥ 10-7 до < 10-6.Кроме того, учитываются и другие факторы, такие как правильная установка, техническое обслуживание и защита от факторов окружающей среды. Это минимальный уровень производительности, указанный в разделе 5.2.2 стандарта ISO 10218-2, если только оценка риска не позволяет использовать более низкое значение.Уровень производительности e (PLe)
Уровень эффективности ISO (PL) «e» означает, что средняя вероятность опасного отказа в час частей системы управления, связанных с безопасностью, находится в пределах от ≥ 10-8 до < 10-7.Кроме того, учитываются и другие факторы, такие как правильная установка, техническое обслуживание и защита от факторов окружающей среды.Цикл захвата и размещения
Количество времени, которое требуется манипулятору, чтобы взять объект и поместить его в нужное место, а затем вернуться в исходное положение. Сюда входит время на этапах ускорения и замедления конкретной задачи. Движение робота контролируется из одной точки в пространстве в другую в системе движения «точка-точка» (PTP).Каждая точка заносится в память управления роботом и затем воспроизводится во время рабочего цикла.Задание по сбору и размещению
Повторяющаяся задача переноса детали, состоящая из действия по выбору, за которым следует действие по размещению.Точки защемления
Точка защемления — это любая точка, в которой человек или часть тела человека может быть зажата между движущимися частями машины, или между движущимися и неподвижными частями машины, или между материалом и любой частью машины. .Точка защемления не обязательно должна вызывать травму конечности или части тела, хотя она может причинить травму — она должна только захватить или зажать человека, чтобы он не смог убежать или извлечь захваченную часть из точки защемления.Шаг
Вращение рабочего органа в вертикальной плоскости вокруг конца руки манипулятора робота.
См. Крен и рыскание.Режим воспроизведения
После того, как робот запрограммирован в режиме обучения, контроллер робота можно переключить в режим воспроизведения, чтобы выполнить программу робота.В режиме воспроизведения программа робота воспроизводится. Это режим, в котором роботы используются в производстве.Операция воспроизведения
Воспроизведение — это операция, при которой обучаемое задание воспроизводится. Эта функция используется для определения места возобновления воспроизведения при операции запуска после приостановки воспроизведения и перемещения курсора или выбора других заданий. 0: Начинает работу там, где находится курсор в задании, отображаемом в данный момент. 1: Появится окно продолжения воспроизведения.Выберите «ДА», и воспроизведение возобновится с того места, где находился курсор, когда воспроизведение было приостановлено. Если выбрано «НЕТ», воспроизведение возобновится с того места, где находится курсор в задании, отображаемом в данный момент. Режимы Включите пульт программирования: PLAY – задание запускается кнопкой [START] на пульте программирования, а задание REMOTE запускается периферийным устройством (внешний вход запуска).Двухточечный
Движение манипулятора, в котором задано ограниченное количество точек вдоль спроецированного пути движения.Манипулятор движется от точки к точке, а не по непрерывному плавному пути.Поза
Альтернативный термин для конфигурации робота, описывающий линейное и угловое положение. Линейное положение включает в себя азимут, высоту и дальность объекта. Угловое положение включает в себя крен, тангаж и рыскание объекта. См. раздел «Крен, тангаж и рыскание».Позиция
Определение местоположения объекта в 3D-пространстве, обычно определяемое системой 3D-координат с использованием координат X, Y и Z.Уровень позиции
Уровень позиции — это степень приближения манипулятора к обучаемой позиции. Уровень положения можно добавить к командам перемещения MOVJ (совместная интерполяция) и MOVL (линейная интерполяция). Если уровень положения не установлен, точность зависит от скорости работы. Установка соответствующего уровня перемещает манипулятор по траектории, подходящей для окружных условий и заготовки. (см. рисунок справа)Переменные положения
Переменные положения используются в программе робота (JOB) для определения местоположения в 3D-пространстве, обычно определяемом системой 3D-координат с использованием координат X, Y и Z.Поскольку это переменная, значение может меняться в зависимости от условий или информации, переданной в JOB.Ограничение мощности и усилия (PFL)
Функция совместной работы, которая позволяет оператору и роботу работать рядом друг с другом, обеспечивая замедление и остановку робота до того, как произойдет контакт. Для безопасной реализации этой функции необходимо использовать функциональную безопасность и дополнительное оборудование для обнаружения. Оценка риска должна использоваться для определения того, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в робототехнической системе.Защитное устройство с датчиком присутствия
Устройство, спроектированное, изготовленное и установленное для создания сенсорного поля для обнаружения проникновения в это поле людей, роботов или объектов. См. Датчик.Программируемый логический контроллер (ПЛК)
Твердотельная система управления, которая имеет программируемую пользователем память для хранения инструкций для реализации определенных функций, таких как: логика управления вводом-выводом, синхронизация, счетная арифметика и обработка данных.ПЛК состоит из центрального процессора, интерфейса ввода/вывода, памяти и программатора, который обычно использует символы, эквивалентные реле. ПЛК специально разработан как промышленная система управления, которая может выполнять функции, эквивалентные релейной панели или проводной твердотельной логической системе управления, и может быть интегрирована в систему управления роботом.Программируемый робот
Функция, которая позволяет дать роботу указание выполнить последовательность шагов, а затем выполнить эту последовательность повторяющимся образом.Затем его можно перепрограммировать для выполнения другой последовательности шагов, если это необходимо.Датчик приближения
Бесконтактное сенсорное устройство, используемое для обнаружения объектов, находящихся на небольшом расстоянии, и может определять расстояние до объекта. Несколько типов включают в себя: радиочастотный, магнитный мост, ультразвуковой и фотоэлектрический. Обычно используется для: высокоскоростного подсчета, обнаружения металлических предметов, контроля уровня, считывания кодовых меток и концевых выключателей. См. Индуктивный датчик.Координаты импульса
Роботы Yaskawa определяют положение осей шарниров роботов в градусах для вращательных шарниров.Импульс — это еще один способ указать положение соединения робота, и он делает это при подсчете импульсов энкодера двигателя робота.Обеспечение качества (ОК)
Описывает методы, политики и процедуры, необходимые для проведения тестирования обеспечения качества на этапах проектирования, производства и поставки при создании, перепрограммировании или обслуживании роботов.Досягаемость: объем пространства (конверт), которого рабочий орган робота может достичь по крайней мере в одной ориентации.
Квазистатический зажим
Тип контакта между человеком и частью робототехнической системы, при котором часть тела может быть зажата между подвижной частью робототехнической системы и другой неподвижной или подвижной частью роботизированной ячейкиДосягаемость
Объем пространства (оболочки), до которого может дотянуться рабочий орган робота хотя бы в одной ориентации.Система реального времени
Компьютерная система, в которой компьютер должен выполнять свои задачи в пределах временных ограничений некоторого процесса одновременно с системой, которой он помогает. Компьютер обрабатывает системные данные (входные данные) от датчиков с целью мониторинга и вычисления параметров управления системой (выходных данных), необходимых для правильной работы системы или процесса. Компьютер должен выполнять свою работу достаточно быстро, чтобы не отставать от оператора, взаимодействующего с ним через терминальное устройство (например, экран или клавиатуру).Оператор, взаимодействующий с компьютером, имеет возможность доступа, поиска и хранения через систему управления базой данных. Доступ к системе позволяет оператору вмешиваться и изменять работу системы.Робот для записи и воспроизведения
Манипулятор, для которого критические точки вдоль заданных траекторий сохраняются последовательно путем записи фактических значений датчиков положения соединения робота по мере его перемещения под оперативным управлением. Для выполнения задачи эти точки воспроизводятся в сервосистеме робота.См. Сервосистема.Робот с прямоугольными координатами
Робот, рука манипулятора которого движется линейно вдоль набора декартовых или прямоугольных осей в направлениях X, Y и Z. Форма рабочего конверта образует прямоугольную фигуру. См. рабочий конверт.Надежность
Вероятность или процент времени, в течение которого устройство будет работать без сбоев в течение определенного периода времени или количества использований (R15.02). Также называется временем безотказной работы робота или средним временем наработки на отказ (MTBF).Восстановление
Модернизировать или модифицировать роботов в соответствии с пересмотренными спецификациями производителя. (Р15.06)Дистанционный режим
Удаленный режим — это тип игрового режима, в котором автоматическое выполнение программы робота инициируется с внешнего устройства (а не с пульта обучения). В этом режиме использование подвесного пульта обучения отключено.Повторяемость
Мера того, насколько близко рука может неоднократно принимать обучаемое положение.Например: когда манипулятор вручную помещается в определенное место, и это место определяется роботом, повторяемость определяет, насколько точно манипулятор может вернуться в это точное место. Степень разрешения в системе управления роботом определяет воспроизводимость. В общем, повторяемость руки никогда не может быть лучше, чем ее разрешающая способность. См. Обучение и точность.Разрешение
Величина движения сустава робота, необходимая для изменения определения положения на один счет.Хотя разрешение каждого совместного датчика обратной связи обычно является постоянным, разрешение конечной точки в мировых координатах непостоянно для вращающихся рук из-за нелинейности кинематики руки.Резьбовое соединение
Суставы робота, способные совершать вращательные движения.Оценка рисков
Процесс оценки предполагаемого использования машины или системы на предмет предсказуемых опасностей и последующего определения уровня риска, связанного с выявленными задачами.Снижение рисков
Второстепенный шаг в процессе оценки риска, включающий снижение уровня риска для определенных задач путем применения мер по снижению риска для устранения или смягчения опасностей.Робот
Перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материалов, деталей, инструментов или определенных устройств с помощью переменных запрограммированных движений для выполнения различных задач. Общие элементы, из которых состоит робот: контроллер, манипулятор и рабочий орган.См. Манипулятор, Контроллер и Конечный эффектор.Система координат робота
Система координат робота определяется базовой осью робота, и точки в системе координат робота будут относиться к основанию робота. Обратите внимание, что по умолчанию базовая система координат и система координат робота совпадают. (см. рисунок справа)Интегратор роботов
См. Интегратор.Язык программирования роботов
Интерфейс между пользователем-человеком и роботом, который связывает человеческие команды с роботом.Контроль пределов радиуса действия робота
Следит за тем, чтобы рука манипулятора или его инструмент находились в обозначенной зоне безопасностиМоделирование робота
Метод эмуляции и прогнозирования поведения и работы роботизированной системы на основе модели (т. е. компьютерной графики) физической системы. (Р15.07)Рулон
Вращение концевого эффектора робота в плоскости, перпендикулярной концу руки манипулятора.См. Шаг и рыскание.Поворотный шарнир
Сустав, который скручивается, качается или сгибается вокруг оси.Поворотный векторный привод (RV)
Торговая марка устройства снижения скорости, которое преобразует низкий крутящий момент с высокой скорости в высокий крутящий момент с низкой скоростью, обычно используемое на главной (большей) оси. См. Cyclo Drive и Harmonic Drive.Вращательное движение
Сустав, который скручивается, качается или сгибается вокруг оси. Примером этого является локоть руки человека.Защита
Ограждение, устройство или техника безопасности, предназначенные для защиты персонала. (Р15.06)Уровень полноты безопасности
Уровень полноты безопасности (SIL) — это метод IEC для определения уровня производительности системы безопасности. SIL 2 соответствует уровню производительности ISO «d», а SIL 3 соответствует уровню производительности ISO «e». ISO 10218 позволяет использовать любой из них.Логическая схема безопасности
Цепь логики безопасности контролирует критически важные для безопасности внешние устройства, такие как световые завесы и сигналы, генерируемые FSU.Логическая схема безопасности программируется с помощью интуитивно понятного пользовательского интерфейса, поддерживаемого подвесным блоком программирования Yaskawa. Он позволяет настроить логические операции, такие как остановка манипулятора или выдача сигнала, если сервоприводы включены.Останов с контролем безопасности
Функция совместной работы, предназначенная для обеспечения безопасного взаимодействия человека и робота. Только когда движение робота прекращается, человеческая безопасность может войти в совместное рабочее пространство. Сервоприводы могут оставаться под напряжением в соответствии с остановом категории 2 в соответствии с ISO 10218-1:2011, 5.4. Оценка рисков должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в робототехнической системе.Робот SCARA
.
Цилиндрический робот, имеющий два параллельных поворотных шарнира (горизонтально сочлененных) и обеспечивающий податливость в одной выбранной плоскости. (ISO 8373) Примечание: SCARA происходит от Selectively Compliant Arm for Robotic AssemblyВторое исходное положение
Помимо «исходной позиции» манипулятора, вторую исходную позицию можно настроить как контрольную точку для абсолютных данных.Начальное значение второго исходного положения является исходным положением (где все оси находятся в импульсе 0). Второе исходное положение можно изменить.Режим безопасности
Уровни режимов оператора на контроллерах роботов Yaskawa включают: режим работы, режим редактирования, режим управления, режим безопасности и режим однократного управления.Сенсор
Инструменты, используемые в качестве устройств ввода для роботов, которые позволяют ему определять аспекты, касающиеся среды робота, а также собственное позиционирование робота.Датчики реагируют на физические раздражители (такие как тепло, свет, звук, давление, магнетизм и движение) и передают результирующий сигнал или данные для измерения, управления или того и другого. (Р15.06)Сенсорная обратная связь
Переменные данные измеряются датчиками и передаются на контроллер в замкнутой системе. Если контроллер получает обратную связь, выходящую за пределы допустимого диапазона, значит, произошла ошибка. Контроллер посылает роботу сигнал об ошибке.Робот производит необходимые корректировки в соответствии с сигналом ошибки.Сервоуправление
Процесс, посредством которого система управления робота проверяет, соответствует ли достигнутое положение робота положению, указанному при планировании движения, с требуемыми критериями производительности и безопасности. (ИСО 8373)Серводвигатель
Электрический силовой механизм, используемый для обеспечения движения или поддержания положения робота (например, двигатель, который преобразует электрическую энергию для обеспечения движения робота) (R15.07). Двигатель реагирует на сигнал, полученный от системы управления, и часто включает энкодер для обеспечения обратной связи с контуром управления.Блок сервоприводов
Механизм электропитания переменного тока, который управляется с помощью логики для преобразования мощности электропитания в форме синусоидальной волны в квадратную форму с широтно-импульсной модуляцией (ШИМ), подаваемой на двигатели для управления двигателем: скорость, направление, ускорение, замедление. и управление торможением.Робот с сервоуправлением
Управление роботом за счет использования замкнутой сервосистемы, в которой положение оси робота измеряется устройствами обратной связи и сохраняется в памяти контроллера.См. Замкнутая система и Сервосистема.Сервосистема
.
Система, в которой контроллер выдает команды двигателям, двигатели приводят в движение руку, а датчик энкодера измеряет вращательные движения двигателя и сообщает о величине движения обратно контроллеру. Этот процесс повторяется много раз в секунду, пока рука не будет перемещена в требуемую точку. См. Робот с сервоуправлениемФункция обнаружения удара
Обнаружение удара — это функция, поддерживаемая контроллером робота Yaskawa, которая снижает воздействие столкновения робота, останавливая манипулятор без какого-либо внешнего датчика, когда инструмент или манипулятор сталкиваются с периферийным устройством.Плечо
Первую или вторую ось робота иногда называют осью плеча, поскольку она чем-то напоминает человеческое плечо. Это часто используется при описании гуманоидных или двуруких систем, таких как Yaskawa Motoman® SDA10D.SIL
.
См. Уровень полноты безопасностиМоделирование
Графическая компьютерная программа, представляющая робота и его среду, которая эмулирует поведение робота во время симулированного запуска робота.Это используется для определения поведения робота в определенных ситуациях, прежде чем фактически дать роботу команду выполнять такие задачи. Элементы моделирования, которые следует учитывать, включают: трехмерное моделирование окружающей среды, эмуляцию кинематики, эмуляцию планирования пути и моделирование датчиков. См. Датчик, Прямая кинематика и Робот.Сингулярность
Конфигурация, в которой два шарнира манипулятора робота становятся соосными (выровнены по общей оси). В одинарной конфигурации плавное следование по траектории обычно невозможно, и робот может потерять управление.Термин происходит от поведения матрицы Якоби, которая становится сингулярной (т. Е. Не имеет обратной) в этих конфигурациях.СЛУРБТ
SLURBT — это термины, которые Yaskawa Motoman использует для удобства описания каждой оси робота. Определение каждого значения выглядит следующим образом:S – Поворотный или поворотный
L — нижний рычаг
U — верхний рычаг
R — Повернуть
Б – изгиб
Т – твистФункция настройки плавного ограничения
Функция настройки мягкого ограничения — это функция для установки диапазона ограничения хода оси движения манипулятора в программном обеспечении.Контроль скорости и разделения
Функция совместной работы, которая позволяет оператору и роботу работать рядом друг с другом, обеспечивая замедление и остановку робота до того, как произойдет контакт. Для безопасной реализации этой функции необходимо использовать функциональную безопасность и дополнительное оборудование для обнаружения. Оценка рисков должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в робототехнической системе.Шлиц
Гладкая непрерывная функция, используемая для аппроксимации набора функций, однозначно определенных на множестве подынтервалов. Аппроксимирующая функция и множество аппроксимируемых функций пересекаются в достаточном числе точек, чтобы обеспечить высокую точность аппроксимации. Цель плавной функции — позволить роботу-манипулятору выполнять задачу без рывков.Сплайновое движение
Расчетный путь, который выполняет робот, может иметь параболическую форму.Сплайн-движение может также выполнять кривую произвольной формы со смесью круглых и параболических форм.Системный интегратор
См. Интегратор.Обучение
Чтобы запрограммировать руку манипулятора, вручную выполняя серию движений и записывая положение в память контроллера робота для воспроизведения.Блокировка обучения
Когда установлена блокировка обучения, режим работы привязан к режиму обучения, и машины не могут воспроизводиться ни с помощью [START], ни с внешнего входа.В целях безопасности всегда устанавливайте переключатель режимов в положение «ОБУЧЕНИЕ» перед началом обучения.Режим обучения
Режим контроллера робота, в котором манипулятор робота программируется путем ручного управления им посредством серии движений и записи положения в память контроллера робота для воспроизведения. Промышленные роботы, не имеющие активной функции ограничения мощности и усилия, требуют использования трехпозиционного переключателя разрешения в режиме обучения.Подвеска Teach
Портативный блок управления, который используется оператором для удаленного управления роботом при выполнении его задач.Движения записываются системой управления роботом для последующего воспроизведения. Современные промышленные роботы поставляются с пультами программирования, которые не только позволяют обучать роботов, но также поддерживают полнофункциональное программирование роботов и безопасный пользовательский интерфейс.Окно обучения
Окно обучения — это экран пользовательского интерфейса пульта программирования. Это окно содержит окно СОДЕРЖИМОЕ ЗАДАНИЯ, и обучение проводится в этом окне. Окно JOB CONTENT содержит следующие элементы: номера строк, курсор, инструкции, дополнительные элементы, комментарии и т. д.Траверса
Система обнаружения объектов, используемая в системе датчиков изображения робота. На одном конце установлен тонко сфокусированный пучок света, а на другом — детектор. Когда луч света прерывается, объект ощущается.Функция измерения времени
Функция измерения времени измеряет время выполнения для указанного раздела в задании или время вывода указанного сигнала.Инструмент
Термин, используемый в широком смысле для определения рабочего устройства, закрепленного на конце манипулятора робота, такого как рука, захват, сварочная горелка, отвертка и т. д.См. раздел «Рука, захват и рабочий орган».Инструмент и рука Помехи
В системе с одним контроллером и несколькими манипуляторами можно использовать функцию проверки интерференции инструментов и манипуляторов для обнаружения возможных интерференций и предотвращения столкновений во время работы. Можно проверить следующие три шаблона:Рука против руки
Рука против инструмента
Инструмент против инструмента
Взаимодействие проверяется с помощью цилиндра, который немного больше, чем рычаг или инструмент.По обеим сторонам цилиндра помещена сфера. Если цилиндр и сферы одного манипулятора во время движения соприкасаются с цилиндром и сферами другого, манипуляторы останавливаются, потому что обнаружена интерференция.
Центральная точка инструмента (TCP)
Центральная точка инструмента (TCP) определяет вершину текущего инструмента, как определено относительно фланца инструмента. Например, для сварочного робота TCP обычно определяется на конце сварочной горелки. После определения и настройки TCP движение робота будет определяться относительно этого кадра (т.т. е. вращение в направлении Rx вызовет вращение вокруг оси X, и в этом кадре будут запрограммированы положения.Контрольная точка инструмента
.
См. Центральная точка инструментаКоординаты инструмента
Когда инструмент, прикрепленный к роботу, перемещается, его система координат инструмента перемещается по отношению к фиксированной системе координат, например, к мировым координатам. Как правило, координаты инструмента не совпадают с мировыми координатами XYZ.Рамка для инструментов
Система координат, прикрепленная к рабочему органу робота (относительно базовой рамы).Датчик касания
Сенсорное устройство, иногда используемое с рукой или захватом робота, которое воспринимает физический контакт с объектом, тем самым давая роботу искусственное осязание. Датчики реагируют на контактные силы, возникающие между ними и твердыми предметами.Генерация траектории (расчет)
Вычисление функций движения, обеспечивающих плавное контролируемое движение суставов.Преобразователь
Устройство, преобразующее энергию из одной формы в другую.Как правило, устройство, которое преобразует входной сигнал в выходной сигнал другой формы. Его также можно рассматривать как устройство, которое преобразует статические сигналы, обнаруженные в окружающей среде (например, давление), в электрический сигнал, который отправляется в систему управления роботом.
Время работы
Период времени, в течение которого робот или производственная линия работают или доступны для работы, в отличие от времени простоя.Настройка координат пользователя
Пользовательские координаты определяются тремя точками, которые были переданы манипулятору посредством операций с осями.Этими тремя определяющими точками являются ORG, XX и XY, как показано на диаграмме ниже. Эти три точки позиционных данных регистрируются в пользовательском файле координат. ORG — исходное положение, а XX — точка на оси X. XY — это точка со стороны оси Y пользовательских координат, которая была обучена, а направления осей Y и Z определяются точкой XY.Система координат пользователя
.
Система координат пользователя — это любая контрольная точка, которую пользователь определил для своего приложения.Это часто прикрепляется к объекту, такому как поддон, и позволяет пользователю учить точки относительно этого объекта. Например, набор позиций может быть задан относительно пользовательской системы координат, прикрепленной к поддону, а затем легко перенесен в другую пользовательскую систему координат на другом поддоне. Это позволяет эффективно повторно использовать позиции. См. также Настройка координат пользователяВакуумная чашка для рук
Конечный эффектор манипулятора робота, который используется для захвата объектов от легкого до среднего веса с помощью всасывания для манипулирования.К таким предметам могут относиться стекло, пластик; и т. д. Обычно используется из-за его достоинств, заключающихся в уменьшении проскальзывания предмета, когда он находится в пределах досягаемости вакуумной присоски. См. Конечный эффектор.Vision Guided
Система управления, в которой траектория робота изменяется в ответ на ввод от системы технического зрения.Видеодатчик
Датчик, который определяет форму, местоположение, ориентацию или размеры объекта с помощью визуальной обратной связи, например, телевизионная камера.Рабочий конверт
Множество всех точек, до которых манипулятор может добраться без вмешательства. Иногда форма рабочего пространства и положение самого манипулятора могут ограничивать рабочую оболочку.Рабочий конверт (пробел)
Объем пространства, в пределах которого робот может выполнять заданные задачи.Домашняя работа
Рабочее исходное положение является ориентиром для операций манипулятора.Это предотвращает взаимодействие с периферийным устройством, гарантируя, что манипулятор всегда находится в заданном диапазоне, что является предварительным условием для таких операций, как запуск линии. Манипулятор можно переместить в заданное рабочее исходное положение с помощью пульта программирования или с помощью сигнала, поступающего от внешнего устройства. Когда манипулятор находится вблизи рабочего исходного положения, включается сигнал рабочего исходного положения.Заготовка
Любая часть, которая обрабатывается, очищается или изготавливается до того, как она станет готовым продуктом.Рабочее пространство
Объем пространства, в пределах которого робот может выполнять заданные задачи.Мировые координаты
Эталонная система координат, в которой рука манипулятора движется линейно вдоль набора декартовых или прямоугольных осей в направлениях X, Y и Z. Форма рабочего конверта образует прямоугольную фигуру. См. прямоугольные координаты.Мировая модель
Трехмерное представление рабочей среды робота, включая объекты, их положение и ориентацию в этой среде, которое хранится в памяти робота.По мере того, как объекты воспринимаются в окружающей среде, система контроллера робота постоянно обновляет модель мира. Роботы используют эту модель мира, чтобы определить свои действия для выполнения поставленных задач.Запястье
Набор поворотных соединений между манипулятором и рабочим органом робота, которые позволяют сориентировать рабочий орган по отношению к заготовке. В большинстве случаев запястье может иметь степени свободы, которые позволяют ему захватывать объект с ориентацией по крену, тангажу и рысканию.См. Рычаг, рабочий орган, крен, тангаж, рыскание и заготовка.Запястье [Вторичная ось]
Взаимосвязанный набор звеньев и механических соединений между рычагом и концевым зажимом, который поддерживает, позиционирует и ориентирует концевой зажим. (ИСО 8373)Рыскание
Вращение рабочего органа в горизонтальной плоскости вокруг конца руки манипулятора. Движение из стороны в сторону по оси. См. Крен и Тангаж.Составление с наборами точек
Состав функций:
Композиция с наборами Баллы (стр. 1 из 6)Разделы: Составление функций, которые множества точек, Составление функций в точках, Составление функций с другими функциями, Word задачи на композицию, обратные функции и состав
До сих пор данная функция ф ( х ), вы бы подставили число или другую переменную вместо x. Вы могли бы даже проявите фантазию и подключите целое выражение для x . Например, задано f ( x ) = 2 х + 3, вы смог найти f ( y 2 1) подключив у 2 1 в для x чтобы получить f ( y 2 1) = 2( у 2 1) + 3 = 2 у 2 2 + 3 = 2 у 2 + 1.
В составе функций, вы подключаете целые функции для x . Другими словами, вы всегда становитесь «причудливым». Но давайте начнем просто. Вместо того, чтобы рассматривать функции как формулы, давайте рассмотрим функции как наборы ( х , и ) очки:
- Лет f = {(2, 3), (1,
1), (0, 0), (1, 1), (2, 3)} и
пусть г = {(3, 1), (1, 2), (0, 2), (2, 2), (3, 1)}.
Найти ( я ) ф (1), ( ii ) г (1) и ( III ) ( г о ф )(1).
( и ) Этот тип упражнения предназначен для того, чтобы подчеркнуть, что ( x , и ) точек действительно ( x , ф ( х )) точки.Чтобы найти f (1), мне нужно найти ( х , y ) точка в набор ( x , ф ( х )) точки с первой координатой x = 1. Затем f (1) это y -значение этой точки. В этом случае точка с разрешением x = 1 есть (1, 1), итак:
( II ) Точка в г ( x ) набор точек с x = 1 это точка (1, 2), так:
( III ) Что такое»( г о ж )(1)»? Это читается как « g -compose- f из 1″, и означает «plug 1 в ф , оценить, а затем подставить результат в г «.Вычисления могут показаться намного проще, если я воспользуюсь следующим, более интуитивным, форматирование:
Теперь буду работать поэтапно, имея в виду, что, хотя я, возможно, привык делать что-то слева вправо (потому что так мы читаем), композиция работает с справа налево (или, если хотите, изнутри наружу). Так что я начни с х = 1. Я подключаю это в f ( x ), так я смотрю в наборе ф ( х ) очки за точку с разрешением x = 1.Дело в том (1, 1). Это говорит мне, что f (1) = 1, так что теперь у меня есть: авторское право Элизабет Стапел 2002-2011 Все права защищены
Работа справа назад влево, я сейчас подключаю x = 1 (из » f (1) = 1″) в г ( х ), так я смотрю в наборе г ( х ) очки за точку с разрешением x = 1.Эта точка есть (1, 2). Это говорит мне что г (1) = 2, так что теперь у меня есть мой ответ:
Обратите внимание, что они никогда не говорили какие были формулы, если они были, для f ( x ) или г ( x ); нам дали только список точек. Но этого списка было достаточно для отвечая на вопрос, пока мы отслеживаем наши x — и y -значения.
- Лет f = {(2, 3), (1,
1), (0, 0), (1, 1), (2, 3)} и
пусть г = {(3, 1), (1, 2), (0, 2), (2, 2), (3, 1)}.
Найти ( и ) ( ж о г )(0), ( ii ) ( ф о г )(1), и ( iii ) ( г или f )(1).
( и ) Найти ( ф о г )(0), (» f -составить- г нуля»), я перепишу выражение как:
Это говорит мне, что я собираюсь вставить ноль в g ( x ), упростите, а затем подставьте результат в f ( x ). Глядя на список г ( x ) точек, я нахожу (0, 2), поэтому г (0) = 2, и мне нужно сейчас найти f (2).Глядя на список f ( x ) точек, я нахожу (2, 3), поэтому f (2) = 3. Тогда:
( и ) Вторая часть работает так же:
( III ) Я могу переписать композицию как ( г о f )(1) = г ( f (1)) = г (1).
Ой-ой; нет g ( x ) точка с х = 1, так что это ерунда попытаться найти значение г (1).Говоря математическим языком, г (1) не определено»; то есть ерунда. Тогда ( г о ф )(1) есть тоже бред, поэтому ответ:
Часть ( iii ) приведенного выше примера указывает на важное соображение относительно доменов и диапазоны. Это может быть, ваша составленная функция (результат, который вы получите после составления две другие функции) будет иметь ограниченный домен или, по крайней мере, домен это более ограничено, чем вы могли бы ожидать.Это будет будет более важным, когда мы позже будем иметь дело с символическим составлением функций.
Другое упражнение этого тип дает вам два графика, а не два набора точек, и вы считайте точки (значения функции) с этих графиков.
- Дано f ( x )
и г ( x )
как показано ниже, найдите ( ф о г )(1).
f ( x ):
г ( x ):
В этом случае я прочитать точки на графике.Меня попросили найти ( ф о г )(1) = f ( г (1)). Это значит, что мне сначала нужно найти г (1). Так я смотрю на графике г ( х ), и найти х = 1. Поиск от х = 1 к графику г ( x ), Я прибываю в и = 3.Тогда точка (1, 3) на графике г ( х ), и г (1) = 3.
Теперь я подставляю это значение, х = 3, в f ( x ). Для этого я смотрю на график f ( x ) и найдите х = 3. Трассировка по сравнению с х = 3 к графику из f ( x ), Я прибываю в и = 3.Тогда точка (3, 3) находится на графике f ( x ), и ф (3) = 3.
- Дано f ( x )
и г ( x )
как показано на графиках ниже, найдите ( г о ф )( x ) для
интегральные значения x на интервале 3 < x < 3.
f ( x ):
г ( x ):
Это просит меня все значения ( г о f )( x ) = г ( f ( x )) для х = 3, 2, 1, 0, 1, 2 и 3. Поэтому я просто буду следить за точками на графиках и вычислять все значения:
Я получил этот ответ от смотрю в разрешении х = 3 на f ( x ) график, находящий соответствующее y -значение из 1 на f ( x ) график и использовать этот ответ как мое новое значение x на г ( x ) график.То есть я смотрел на х = 3 на f ( x ) график, обнаружил, что это привело к y = 1, стало x = 1 на г ( x ) график, и обнаружил, что это привело к y = 1. Аналогично:
( г или f )(2) = г ( f (2)) = г (1) = 3
( г или f )(1) = г ( f (1)) = г (3) = 2
( г или f )(0) = г ( f (0)) = г (2) = 0
( г или f )(1) = г ( f (1)) = г (0) = 2
( г или f )(2) = г ( f (2)) = г (2) = 3
( г или f )(3) = г ( f (3)) = г (3) = 1Вам вообще не дано однако функции как наборы точек или как графики.Как правило, у вас есть формулы для ваших функций. Итак, давайте посмотрим, как выглядит композиция в таком случае…
Топ | 1 | 2 | 3 | 4 | 5 | 6 | Возвращение к индексу Далее >>
Процитировать эту статью как:
Стапель, Элизабет. «Композиция с наборами точек.» Purplemath . В наличии из
https://www.purplemath.com/modules/fcncomp.htm . Доступ [Дата] [Месяц] 2016
5 алгоритмов кластеризации, которые нужно знать ученым | Джордж Сейф
Я пишу информационный бюллетень для учащихся под названием «Могущественное знание».Каждый новый выпуск содержит ссылки и ключевые уроки из самого лучшего контента, включая цитаты, книги, статьи, подкасты и видео. Каждый из них выбран специально для обучения тому, как жить более мудрой, счастливой и полной жизнью. Зарегистрируйтесь здесь .
Кластеризация — это метод машинного обучения, который включает группировку точек данных. Учитывая набор точек данных, мы можем использовать алгоритм кластеризации для классификации каждой точки данных в определенную группу. Теоретически точки данных, находящиеся в одной группе, должны иметь схожие свойства и/или характеристики, в то время как точки данных в разных группах должны иметь сильно различающиеся свойства и/или характеристики.Кластеризация — это метод обучения без учителя, распространенный метод статистического анализа данных, используемый во многих областях.
В науке о данных мы можем использовать кластерный анализ, чтобы получить ценную информацию из наших данных, увидев, в какие группы попадают точки данных, когда мы применяем алгоритм кластеризации. Сегодня мы рассмотрим 5 популярных алгоритмов кластеризации, которые необходимо знать ученым, а также их плюсы и минусы!
Кластеризация K-средних
K-средних, вероятно, самый известный алгоритм кластеризации.Его преподают на многих вводных курсах по науке о данных и машинному обучению. Это легко понять и реализовать в коде! Посмотрите на рисунок ниже для иллюстрации.
Кластеризация K-средних- Для начала мы сначала выбираем несколько классов/групп для использования и случайным образом инициализируем их соответствующие центральные точки. Чтобы определить количество используемых классов, полезно быстро просмотреть данные и попытаться определить какие-либо отдельные группы. Центральные точки — это векторы той же длины, что и каждый вектор точек данных, и они обозначены буквами «X» на графике выше.
- Каждая точка данных классифицируется путем вычисления расстояния между этой точкой и центром каждой группы, а затем классификации точки для включения в группу, центр которой находится ближе всего к ней.
- На основе этих классифицированных точек мы повторно вычисляем центр группы, взяв среднее значение всех векторов в группе.
- Повторяйте эти шаги для заданного количества итераций или до тех пор, пока центры групп не будут сильно меняться между итерациями. Вы также можете выбрать случайную инициализацию групповых центров несколько раз, а затем выбрать запуск, который выглядит так, как будто он дал наилучшие результаты.
Преимущество метода K-Means в том, что он работает довольно быстро, поскольку все, что мы на самом деле делаем, — это вычисляем расстояния между точками и центрами групп; очень мало вычислений! Таким образом, он имеет линейную сложность O ( n ).
С другой стороны, K-Means имеет несколько недостатков. Во-первых, вы должны выбрать количество групп/классов. Это не всегда тривиально, и в идеале с помощью алгоритма кластеризации мы хотели бы, чтобы он вычислил их для нас, потому что его смысл состоит в том, чтобы получить некоторое представление о данных.K-средние также начинаются со случайного выбора центров кластеров и, следовательно, могут давать разные результаты кластеризации при разных запусках алгоритма. Таким образом, результаты могут быть неповторяемыми и непоследовательными. Другие кластерные методы более последовательны.
K-Medians — это еще один алгоритм кластеризации, связанный с K-Means, за исключением того, что вместо повторного вычисления центральных точек группы с использованием среднего мы используем срединный вектор группы. Этот метод менее чувствителен к выбросам (из-за использования медианы), но намного медленнее для больших наборов данных, поскольку при вычислении медианного вектора требуется сортировка на каждой итерации.
Кластеризация среднего сдвига
Кластеризация среднего сдвига — это алгоритм на основе скользящего окна, который пытается найти плотные области точек данных. Это алгоритм на основе центроида, означающий, что цель состоит в том, чтобы найти центральные точки каждой группы / класса, который работает путем обновления кандидатов на центральные точки, чтобы они были средним значением точек в скользящем окне. Эти окна-кандидаты затем фильтруются на этапе постобработки, чтобы исключить почти дубликаты, формируя окончательный набор центральных точек и соответствующих им групп.Посмотрите на рисунок ниже для иллюстрации.
Кластеризация среднего сдвига для одного скользящего окна- Чтобы объяснить средний сдвиг, мы рассмотрим набор точек в двумерном пространстве, как показано на рисунке выше. Начнем с круглого скользящего окна с центром в точке C (выбранной случайным образом) и радиусом r в качестве ядра. Среднее смещение — это алгоритм восхождения, который включает итеративное смещение этого ядра в область с более высокой плотностью на каждом шаге до сходимости.
- На каждой итерации скользящее окно смещается в сторону областей с более высокой плотностью путем смещения центральной точки к среднему значению точек внутри окна (отсюда и название).Плотность в скользящем окне пропорциональна количеству точек внутри него. Естественно, смещаясь к среднему значению точек в окне, он будет постепенно двигаться в сторону областей с более высокой плотностью точек.
- Продолжаем сдвигать скользящее окно в соответствии со средним значением до тех пор, пока не останется направления, в котором сдвиг может разместить больше точек внутри ядра. Посмотрите на рисунок выше; мы продолжаем перемещать круг, пока не перестанем увеличивать плотность (то есть количество точек в окне).
- Этот процесс, состоящий из шагов с 1 по 3, выполняется со многими скользящими окнами, пока все точки не попадут в окно. Когда несколько скользящих окон перекрываются, окно, содержащее наибольшее количество точек, сохраняется. Затем точки данных группируются в соответствии со скользящим окном, в котором они находятся.
Ниже показан весь процесс от начала до конца со всеми скользящими окнами. Каждая черная точка представляет собой центр тяжести скользящего окна, а каждая серая точка представляет собой точку данных.
Весь процесс кластеризации по среднему смещениюВ отличие от кластеризации по методу K-средних нет необходимости выбирать количество кластеров, так как среднее смещение определяет это автоматически. Это огромное преимущество. Тот факт, что центры кластеров сходятся к точкам максимальной плотности, также весьма желателен, поскольку он довольно интуитивно понятен и хорошо вписывается в естественный смысл, управляемый данными. Недостатком является то, что выбор размера окна/радиуса «r» может быть нетривиальным.
Пространственная кластеризация приложений с шумом на основе плотности (DBSCAN)
DBSCAN — это алгоритм кластеризации на основе плотности, аналогичный алгоритму среднего сдвига, но с несколькими заметными преимуществами.Взгляните на еще одну причудливую графику ниже и давайте начнем!
DBSCAN Кластеризация смайликов- DBSCAN начинается с произвольной начальной точки данных, которая еще не посещалась. Окрестность этой точки извлекается с использованием расстояния эпсилон ε (все точки, находящиеся в пределах расстояния ε, являются точками соседства).
- Если в этой окрестности имеется достаточное количество точек (в соответствии с minPoints), то начинается процесс кластеризации, и текущая точка данных становится первой точкой в новом кластере.В противном случае точка будет помечена как шумовая (позже эта шумная точка может стать частью кластера). В обоих случаях эта точка помечается как «посещенная».
- Для этой первой точки в новом кластере точки в пределах его окрестности расстояния ε также становятся частью того же кластера. Эта процедура включения всех точек в окрестности ε в один и тот же кластер затем повторяется для всех новых точек, которые были только что добавлены в группу кластеров.
- Этот процесс шагов 2 и 3 повторяется до тех пор, пока не будут определены все точки в кластере i.e все точки в окрестности ε кластера были посещены и помечены.
- После завершения работы с текущим кластером извлекается и обрабатывается новая непосещенная точка, что приводит к обнаружению следующего кластера или шума. Этот процесс повторяется до тех пор, пока все точки не будут отмечены как посещенные. Поскольку в конце этого все точки были посещены, каждая точка будет помечена либо как принадлежащая кластеру, либо как шум.
DBSCAN имеет ряд значительных преимуществ по сравнению с другими алгоритмами кластеризации.Во-первых, он вообще не требует определенного числа кластеров. Он также идентифицирует выбросы как шумы, в отличие от среднего сдвига, который просто объединяет их в кластер, даже если точка данных сильно отличается. Кроме того, он может довольно хорошо находить кластеры произвольного размера и произвольной формы.
Основным недостатком DBSCAN является то, что он не работает так же хорошо, как другие, когда кластеры имеют разную плотность. Это связано с тем, что установка порога расстояния ε и minPoints для идентификации точек соседства будет варьироваться от кластера к кластеру, когда плотность меняется.Этот недостаток также возникает с данными очень высокой размерности, поскольку снова становится сложно оценить пороговое значение расстояния ε.
Ожидание-максимизация (EM) Кластеризация с использованием гауссовских смешанных моделей (GMM)
Одним из основных недостатков K-Means является наивное использование среднего значения для центра кластера. Мы можем понять, почему это не лучший способ сделать что-то, взглянув на изображение ниже. С левой стороны человеческому глазу совершенно очевидно, что есть два круглых кластера с разным радиусом с центром в одном и том же среднем значении.K-Means не может справиться с этим, потому что средние значения кластеров очень близки друг к другу. K-Means также терпит неудачу в случаях, когда кластеры не являются круговыми, опять же в результате использования среднего значения в качестве центра кластера.
Два случая отказа для K-среднихГауссовские смешанные модели (GMM) дают нам больше гибкости, чем K-средние. С GMM мы предполагаем, что точки данных распределены по Гауссу; это менее ограничительное предположение, чем утверждение, что они круговые с использованием среднего значения. Таким образом, у нас есть два параметра для описания формы кластеров: среднее значение и стандартное отклонение! Взяв пример в двух измерениях, это означает, что кластеры могут принимать любую эллиптическую форму (поскольку у нас есть стандартное отклонение в обоих направлениях x и y).Таким образом, каждое распределение Гаусса относится к одному кластеру.
Чтобы найти параметры гауссовой диаграммы для каждого кластера (например, среднее значение и стандартное отклонение), мы будем использовать алгоритм оптимизации под названием «Максимизация ожидания» (EM). Взгляните на рисунок ниже как на иллюстрацию того, как гауссианы подгоняются к кластерам. Затем мы можем приступить к процессу кластеризации ожидания-максимизации с использованием GMM.
EM Кластеризация с использованием GMM- Мы начинаем с выбора количества кластеров (как это делает K-Means) и случайным образом инициализируем параметры распределения Гаусса для каждого кластера.Можно попытаться дать хорошую оценку начальных параметров, также взглянув на данные. Хотя обратите внимание, как видно на графике выше, это не обязательно на 100%, поскольку гауссианы начинаются как очень плохие, но быстро оптимизируются.
- Учитывая эти распределения Гаусса для каждого кластера, вычислите вероятность того, что каждая точка данных принадлежит определенному кластеру. Чем ближе точка к центру гауссианы, тем больше вероятность того, что она принадлежит этому кластеру. Это должно иметь интуитивно понятный смысл, поскольку при гауссовском распределении мы предполагаем, что большая часть данных находится ближе к центру кластера.
- На основе этих вероятностей мы вычисляем новый набор параметров для гауссовых распределений, чтобы максимизировать вероятности точек данных в кластерах. Мы вычисляем эти новые параметры, используя взвешенную сумму позиций точек данных, где веса — это вероятности того, что точка данных принадлежит этому конкретному кластеру. Чтобы объяснить это визуально, мы можем взглянуть на график выше, в частности на желтый кластер в качестве примера. Распределение начинается случайным образом на первой итерации, но мы видим, что большинство желтых точек находятся справа от этого распределения.Когда мы вычисляем сумму, взвешенную по вероятностям, даже если рядом с центром есть некоторые точки, большинство из них находятся справа. Таким образом, естественно, среднее значение распределения смещается ближе к этому набору точек. Мы также можем видеть, что большинство точек расположены «сверху справа налево внизу». Поэтому стандартное отклонение изменяется, чтобы создать эллипс, который больше соответствует этим точкам, чтобы максимизировать сумму, взвешенную по вероятностям.
- Шаги 2 и 3 многократно повторяются до сходимости, при которой распределения не сильно меняются от итерации к итерации.
Использование GMM имеет два ключевых преимущества. Во-первых, GMM гораздо более гибкие с точки зрения кластерной ковариации , чем K-Means; из-за параметра стандартного отклонения кластеры могут принимать любую форму эллипса, а не ограничиваться кругами. K-Means на самом деле является частным случаем GMM, в котором ковариация каждого кластера по всем измерениям приближается к 0. Во-вторых, поскольку GMM использует вероятности, они могут иметь несколько кластеров на точку данных. Таким образом, если точка данных находится в середине двух перекрывающихся кластеров, мы можем просто определить ее класс, сказав, что она принадлежит X-процент к классу 1 и Y-процент к классу 2.То есть GMM поддерживают смешанное членство .
Агломеративная иерархическая кластеризация
Алгоритмы иерархической кластеризации делятся на 2 категории: нисходящие и восходящие. Восходящие алгоритмы сначала обрабатывают каждую точку данных как отдельный кластер, а затем последовательно объединяют (или агломерируют ) пары кластеров до тех пор, пока все кластеры не будут объединены в один кластер, содержащий все точки данных. Поэтому восходящая иерархическая кластеризация называется иерархической агломеративной кластеризацией или HAC .Эта иерархия кластеров представлена в виде дерева (или дендрограммы). Корень дерева — это уникальный кластер, в котором собраны все выборки, а листья — это кластеры только с одной выборкой. Перед тем, как перейти к шагам алгоритма, посмотрите на рисунок ниже. Затем мы выбираем метрику расстояния, которая измеряет расстояние между двумя кластерами.В качестве примера мы будем использовать среднюю связь , которая определяет расстояние между двумя кластерами как среднее расстояние между точками данных в первом кластере и точками данных во втором кластере.
- На каждой итерации мы объединяем два кластера в один. Два объединяемых кластера выбираются как кластеры с наименьшей средней связью. То есть по выбранной нами метрике расстояния эти два кластера имеют наименьшее расстояние между собой и, следовательно, наиболее похожи и должны быть объединены.
- Шаг 2 повторяется до тех пор, пока мы не достигнем корня дерева, т.е. у нас будет только один кластер, содержащий все точки данных. Таким образом, мы можем выбрать, сколько кластеров мы хотим в конце, просто выбрав, когда прекратить объединение кластеров, то есть когда мы перестанем строить дерево!
 3\) по оси \(Y\). Для этого выполним следующую последовательность действий:
3\) по оси \(Y\). Для этого выполним следующую последовательность действий: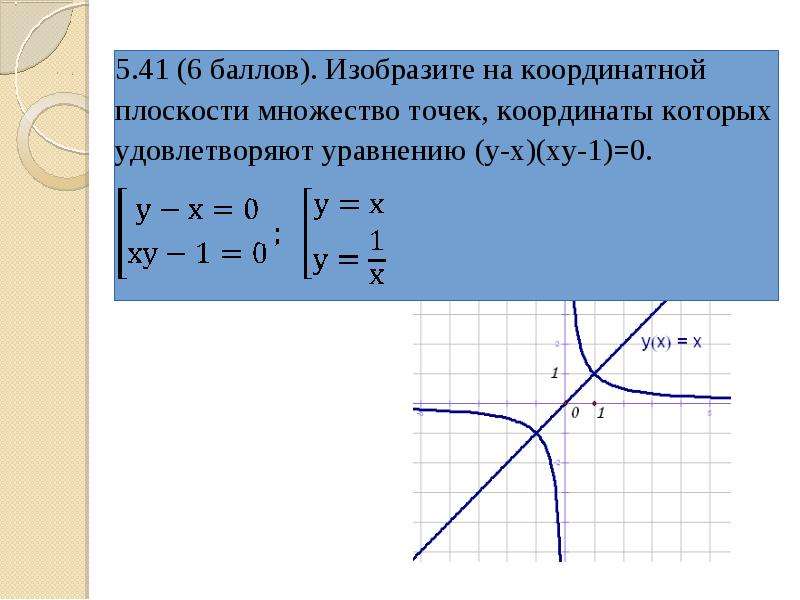 Также полезным будет указать параметр
Также полезным будет указать параметр 

 Тот же принцип действует в религии вуду: в куклу, похожую на определенного человека, втыкают булавку, чтобы принести этому человеку вред. Должно быть, пещерный живописец верил, что рисунок поможет ему на охоте.
Тот же принцип действует в религии вуду: в куклу, похожую на определенного человека, втыкают булавку, чтобы принести этому человеку вред. Должно быть, пещерный живописец верил, что рисунок поможет ему на охоте. 11: 41–44
11: 41–44

 Напротив, мы словно видим, как живописец швырял краску на огромный холст, чтобы создать волнующую и живую абстрактную композицию. В чем цель такой картины? Она призвана выразить творческую активность и физическую энергию художника, рассказать зрителю о действиях его тела и мысли во время создания произведения.
Напротив, мы словно видим, как живописец швырял краску на огромный холст, чтобы создать волнующую и живую абстрактную композицию. В чем цель такой картины? Она призвана выразить творческую активность и физическую энергию художника, рассказать зрителю о действиях его тела и мысли во время создания произведения.
 Средневековый мозаичист, стремившийся рассказать библейскую историю максимально убедительно, изобразил фигуры не так естественно, как, например, Бронзино, но сделал своих персонажей легкоузнаваемыми и разместил в центре композиции Христа, подчеркнув значимость не только его фигуры, но и его жеста. Более всего этот мастер стремился к ясности; он остерегался даже намека на неоднозначность, а сложность и сходство с тем, что мы считаем естественными человеческими чертами, показались бы ему лишь отвлекающими деталями.
Средневековый мозаичист, стремившийся рассказать библейскую историю максимально убедительно, изобразил фигуры не так естественно, как, например, Бронзино, но сделал своих персонажей легкоузнаваемыми и разместил в центре композиции Христа, подчеркнув значимость не только его фигуры, но и его жеста. Более всего этот мастер стремился к ясности; он остерегался даже намека на неоднозначность, а сложность и сходство с тем, что мы считаем естественными человеческими чертами, показались бы ему лишь отвлекающими деталями.
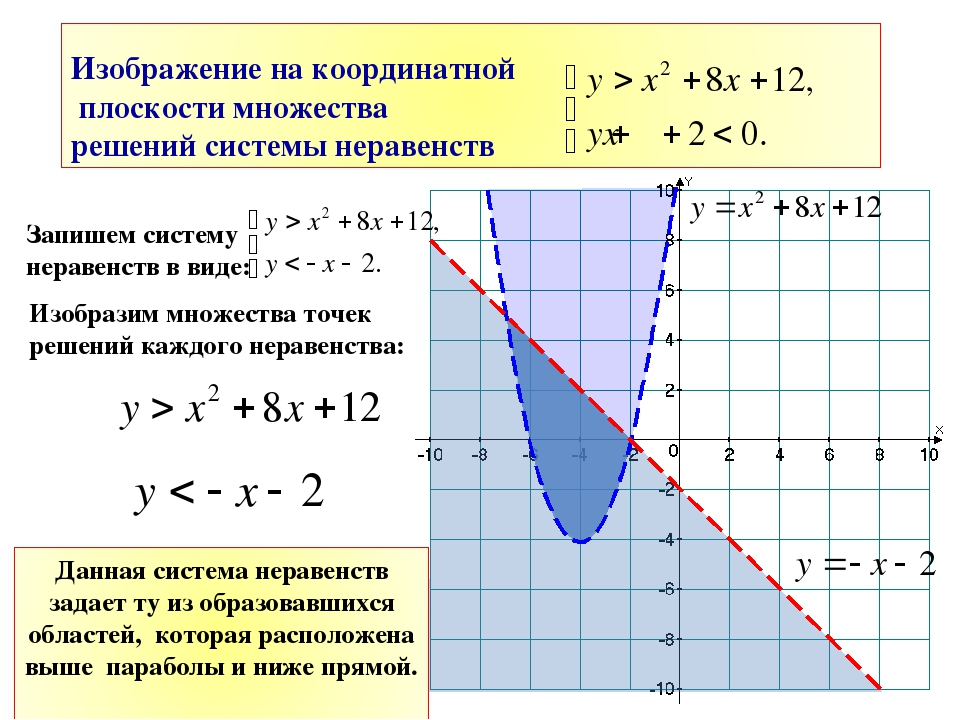 Заметьте, что все пространство в картине Бронзино заполнено предметами и фигурами; глазу негде отдохнуть. Эта беспокойная активность форм связана с самим сюжетом произведения, который можно обозначить как смятение и неразрешимость. Любовь, Удовольствие, Ревность и Лживость переплелись в изощренный формальный и интеллектуальный узел.
Заметьте, что все пространство в картине Бронзино заполнено предметами и фигурами; глазу негде отдохнуть. Эта беспокойная активность форм связана с самим сюжетом произведения, который можно обозначить как смятение и неразрешимость. Любовь, Удовольствие, Ревность и Лживость переплелись в изощренный формальный и интеллектуальный узел.
 Мы уверены, что единственный способ перейти от пассивного наблюдения к активному, проницательному видению — это поиск слов, необходимых для описания и анализа произведений искусства.
Мы уверены, что единственный способ перейти от пассивного наблюдения к активному, проницательному видению — это поиск слов, необходимых для описания и анализа произведений искусства. Каким условием можно задать множество точек
Каким условием можно задать множество точек Найдите значение выражения
Найдите значение выражения Четырехсторонняя фигура представляет собой не плоскую плоскость, а изогнутую.
Четырехсторонняя фигура представляет собой не плоскую плоскость, а изогнутую. Если бы вы вырезали этот участок из коробки с салфетками, вам, скорее всего, пришлось бы несколько раз менять угол наклона ножниц или канцелярского ножа, вместо того, чтобы сделать один ровный разрез.Когда вы закончите резать, четыре точки обрезанного края не будут образовывать единую плоскую поверхность. Эти точки не компланарны.
Если бы вы вырезали этот участок из коробки с салфетками, вам, скорее всего, пришлось бы несколько раз менять угол наклона ножниц или канцелярского ножа, вместо того, чтобы сделать один ровный разрез.Когда вы закончите резать, четыре точки обрезанного края не будут образовывать единую плоскую поверхность. Эти точки не компланарны.
 3 Преимущества элитного членства в участвующих брендах
3 Преимущества элитного членства в участвующих брендах Если участвующий отель не может выполнить бронирование, он оплачивает аналогичное проживание поблизости для элитного участника в эту ночь и компенсирует участнику неудобства.Участвующий отель должен быть открыт и находиться в рабочем состоянии, чтобы можно было применить льготу/компенсацию по Гарантии окончательного бронирования. В отелях The Ritz-Carlton® и St. Regis Гарантия полного бронирования распространяется только на участников Titanium Elite и Ambassador Elite. Полная гарантия бронирования предоставляется в отелях следующих брендов: The Ritz-Carlton®, St. Regis, EDITION®, The Luxury Collection, W Hotels, JW Marriott®, Marriott Hotels®, Sheraton, Delta Hotels®, Le Méridien, Westin, Отели Autograph Collection®, отели Renaissance®, Tribute Portfolio, отели Gaylord®, Courtyard®, Four Points, SpringHill Suites®, отели Protea®, Fairfield by Marriott®, отели AC®, отели Aloft®, отели Moxy®, Residence Inn® , TownePlace Suites® и Element.Полная гарантия бронирования не предоставляется в отелях следующих брендов: Design Hotels, Marriott Vacation Club, Marriott Grand Residence Club и Vistana properties.
Если участвующий отель не может выполнить бронирование, он оплачивает аналогичное проживание поблизости для элитного участника в эту ночь и компенсирует участнику неудобства.Участвующий отель должен быть открыт и находиться в рабочем состоянии, чтобы можно было применить льготу/компенсацию по Гарантии окончательного бронирования. В отелях The Ritz-Carlton® и St. Regis Гарантия полного бронирования распространяется только на участников Titanium Elite и Ambassador Elite. Полная гарантия бронирования предоставляется в отелях следующих брендов: The Ritz-Carlton®, St. Regis, EDITION®, The Luxury Collection, W Hotels, JW Marriott®, Marriott Hotels®, Sheraton, Delta Hotels®, Le Méridien, Westin, Отели Autograph Collection®, отели Renaissance®, Tribute Portfolio, отели Gaylord®, Courtyard®, Four Points, SpringHill Suites®, отели Protea®, Fairfield by Marriott®, отели AC®, отели Aloft®, отели Moxy®, Residence Inn® , TownePlace Suites® и Element.Полная гарантия бронирования не предоставляется в отелях следующих брендов: Design Hotels, Marriott Vacation Club, Marriott Grand Residence Club и Vistana properties. В соответствии с разделом 4.1.c. если элитный участник имеет подтвержденное бронирование, но переселяется из объекта по прибытии, участвующий отель выплачивает компенсацию в соответствии с гарантией окончательного бронирования на эту дату в соответствии с Правилами программы. Если элитный участник получает компенсацию в рамках Ultimate Reservation Guarantee, он/она не имеет права на получение дополнительной элитной компенсации в рамках гарантии Elite Benefits Guarantee.
В соответствии с разделом 4.1.c. если элитный участник имеет подтвержденное бронирование, но переселяется из объекта по прибытии, участвующий отель выплачивает компенсацию в соответствии с гарантией окончательного бронирования на эту дату в соответствии с Правилами программы. Если элитный участник получает компенсацию в рамках Ultimate Reservation Guarantee, он/она не имеет права на получение дополнительной элитной компенсации в рамках гарантии Elite Benefits Guarantee. S. 100 долларов США для всех участников с элитным статусом, за исключением участников со статусом Platinum Elite, Titanium Elite и Ambassador Elite, которые получают 100 долларов США и 90 000 баллов
S. 100 долларов США для всех участников с элитным статусом, за исключением участников со статусом Platinum Elite, Titanium Elite и Ambassador Elite, которые получают 100 долларов США и 90 000 баллов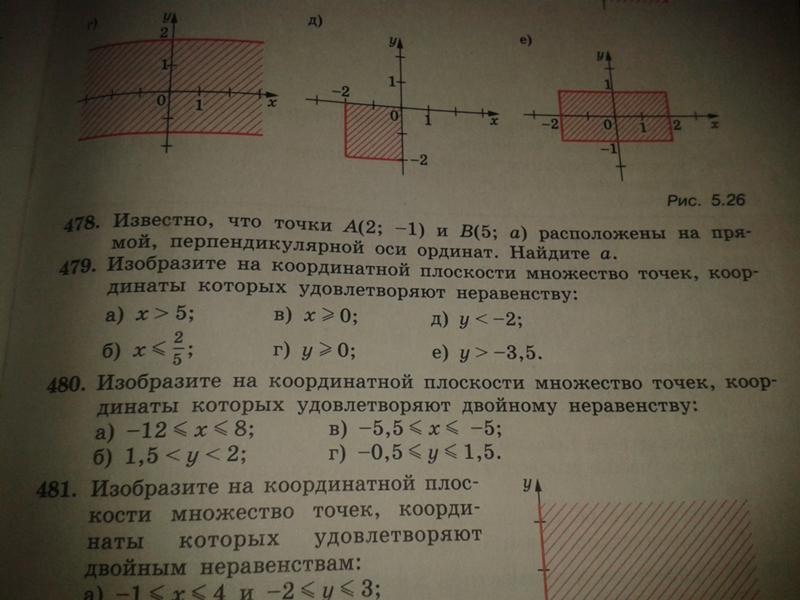 Отели, отели Protea и отели Moxy.В отелях The Ritz-Carlton и EDITION предоставляется скидка в десять процентов (10%) только на брендовые товары, за исключением мелких вещей, приобретенных в сувенирных магазинах на территории отеля. Для получения скидки необходимо предъявить карту членского счета (физическую карту или мобильную карту).
Отели, отели Protea и отели Moxy.В отелях The Ritz-Carlton и EDITION предоставляется скидка в десять процентов (10%) только на брендовые товары, за исключением мелких вещей, приобретенных в сувенирных магазинах на территории отеля. Для получения скидки необходимо предъявить карту членского счета (физическую карту или мобильную карту). 2.a.
2.a. Объекты недвижимости Vistana предлагают элитный приветственный подарок только тем, кто не является владельцем Vistana.
Объекты недвижимости Vistana предлагают элитный приветственный подарок только тем, кто не является владельцем Vistana. Улучшенные номера могут включать в себя номера с желаемым видом, номера на верхних этажах, угловые номера, номера со специальными удобствами, номера на представительских этажах. В отеле The Ritz-Carlton не предусмотрены номера с прямым доступом в клуб. Обновления предоставляются в зависимости от наличия и определяются каждым отелем-участником. Бесплатное повышение категории номера для участников со статусом Gold Elite доступно во всех участвующих брендах, кроме Marriott Vacation Club, Marriott Grand Residence Club, отелей Aloft, Element и Vistana.
Улучшенные номера могут включать в себя номера с желаемым видом, номера на верхних этажах, угловые номера, номера со специальными удобствами, номера на представительских этажах. В отеле The Ritz-Carlton не предусмотрены номера с прямым доступом в клуб. Обновления предоставляются в зависимости от наличия и определяются каждым отелем-участником. Бесплатное повышение категории номера для участников со статусом Gold Elite доступно во всех участвующих брендах, кроме Marriott Vacation Club, Marriott Grand Residence Club, отелей Aloft, Element и Vistana.
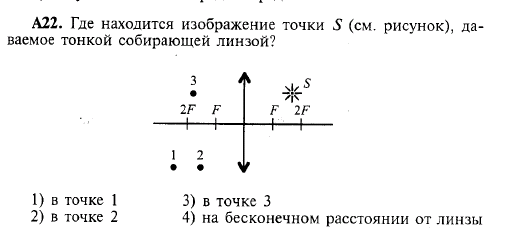 В The Ritz-Carlton люксы включены только для участников Titanium Elite и Ambassador Elite, а номера с прямым доступом в клуб исключены. Повышение категории номера предоставляется в зависимости от наличия возможности и определяется каждым отелем-участником. Бесплатное повышение категории номера для участников Platinum Elite и выше доступно во всех участвующих брендах, за исключением Marriott Vacation Club, Marriott Grand Residence Club, отелей Aloft, Element и Vistana.
В The Ritz-Carlton люксы включены только для участников Titanium Elite и Ambassador Elite, а номера с прямым доступом в клуб исключены. Повышение категории номера предоставляется в зависимости от наличия возможности и определяется каждым отелем-участником. Бесплатное повышение категории номера для участников Platinum Elite и выше доступно во всех участвующих брендах, за исключением Marriott Vacation Club, Marriott Grand Residence Club, отелей Aloft, Element и Vistana. 4.3.b). Участники, выбравшие или получившие баллы в качестве приветственного элитного подарка и обозначившие свой предпочтительный способ получения миль, должны инициировать перевод приветственных элитных баллов в мили, как описано в разделе 2.3. Если элитный приветственный подарок не предлагается по прибытии, применяется компенсация (см. ниже). Выбор зависит от бренда-участника:
4.3.b). Участники, выбравшие или получившие баллы в качестве приветственного элитного подарка и обозначившие свой предпочтительный способ получения миль, должны инициировать перевод приветственных элитных баллов в мили, как описано в разделе 2.3. Если элитный приветственный подарок не предлагается по прибытии, применяется компенсация (см. ниже). Выбор зависит от бренда-участника: Кредит в размере 10 сингапурских долларов на еду и напитки («F&B») за весь период проживания
Кредит в размере 10 сингапурских долларов на еду и напитки («F&B») за весь период проживания Regis, The Luxury Collection, W Hotels, Sheraton, Le Méridien, Westin, Tribute Portfolio
Regis, The Luxury Collection, W Hotels, Sheraton, Le Méridien, Westin, Tribute Portfolio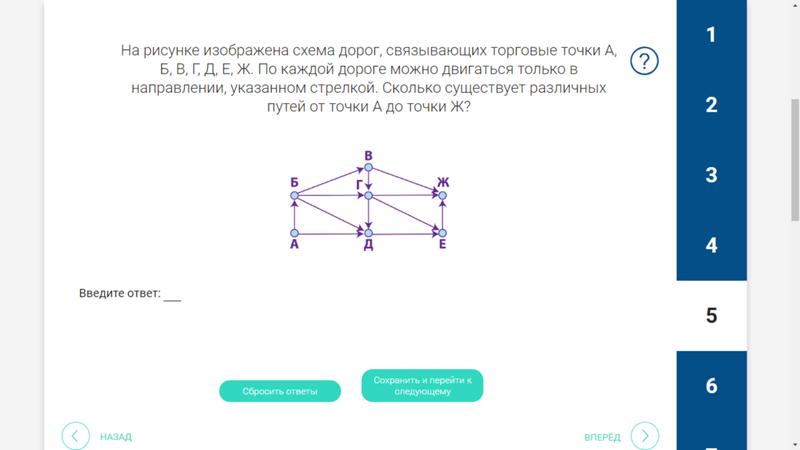 Кредит в размере 10 долларов США на еду и напитки за ночь проживания для участника +1**
Кредит в размере 10 долларов США на еду и напитки за ночь проживания для участника +1** 50 долларов США
50 долларов США
 В отелях Delta Hotels без Signature Club Lounge в качестве одобренной альтернативы участник получит доступ к Elite Pantry. Доступ в лаундж предоставляется в отелях Courtyard с лаунджем за пределами США и Канады. Эта привилегия не действует, если завтрак включен в стоимость или бренд предлагает утвержденную альтернативу. За доступ в зал ожидания может взиматься дополнительная плата, если количество гостей превышает количество участников плюс одно пособие (включая детей). Гостиная может включать легкие закуски и ежедневный континентальный завтрак.Доступ в лаундж не предоставляется в отелях следующих брендов: The Ritz-Carlton, St. Regis, EDITION, The Luxury Collection, W Hotels, Design Hotels, Tribute Portfolio, Gaylord Hotels, Four Points, SpringHill Suites, Protea Hotels, Fairfield, AC Hotels. , Aloft, Moxy Hotels, Residence Inn, TownePlace Suites, Element, Marriott Vacation Club, Marriott Grand Residence Club и участвующие отели Vistana. Это преимущество распространяется только на один (1) номер, в котором проживает участник со статусом Platinum Elite.
В отелях Delta Hotels без Signature Club Lounge в качестве одобренной альтернативы участник получит доступ к Elite Pantry. Доступ в лаундж предоставляется в отелях Courtyard с лаунджем за пределами США и Канады. Эта привилегия не действует, если завтрак включен в стоимость или бренд предлагает утвержденную альтернативу. За доступ в зал ожидания может взиматься дополнительная плата, если количество гостей превышает количество участников плюс одно пособие (включая детей). Гостиная может включать легкие закуски и ежедневный континентальный завтрак.Доступ в лаундж не предоставляется в отелях следующих брендов: The Ritz-Carlton, St. Regis, EDITION, The Luxury Collection, W Hotels, Design Hotels, Tribute Portfolio, Gaylord Hotels, Four Points, SpringHill Suites, Protea Hotels, Fairfield, AC Hotels. , Aloft, Moxy Hotels, Residence Inn, TownePlace Suites, Element, Marriott Vacation Club, Marriott Grand Residence Club и участвующие отели Vistana. Это преимущество распространяется только на один (1) номер, в котором проживает участник со статусом Platinum Elite.
 За пределами США и Канады в отелях Courtyard с лаунджем завтрак подается в ресторане, когда лаундж закрыт.
За пределами США и Канады в отелях Courtyard с лаунджем завтрак подается в ресторане, когда лаундж закрыт. 100 сингапурских долларов, если участнику
100 сингапурских долларов, если участнику Эта привилегия гарантирована во всех отелях-участниках, за исключением курортных и конференц-отелей, а также дизайнерских отелей TM , где она предоставляется при наличии возможности.Это преимущество не распространяется на отели Marriott Vacation Club, Marriott Grand Residence Club и Vistana.
Эта привилегия гарантирована во всех отелях-участниках, за исключением курортных и конференц-отелей, а также дизайнерских отелей TM , где она предоставляется при наличии возможности.Это преимущество не распространяется на отели Marriott Vacation Club, Marriott Grand Residence Club и Vistana. Сайт marriott.com может быть изменен в любое время. Как только участник со статусом Platinum Elite получает право на получение ежегодного привилегии на выбор в течение 50 ночей, он/она должен выбрать ежегодное привилегию на выбор в течение 50 ночей, посетив сайт selection-benefit.marriott.com и выбрав один из привилегий на выбор в течение 50 ночей. Преимущества. Выбор должен быть сделан на сайте selection-benefit.marriott.com и не может быть сделан через службу поддержки участников. Все выбранные ежегодные льготы на выбор за 50 ночей являются окончательными и не могут быть изменены после того, как они были сделаны. В случае, если правомочный участник со статусом Platinum Elite не выберет ежегодное преимущество на выбор в течение 50 ночей до 23:59.м. По восточному времени США 7 января года, следующего за применимым квалификационным периодом, такие участники со статусом Platinum Elite получат пять (5) наград Suite Night Awards™ в качестве своей ежегодной льготы на выбор в течение 50 ночей ( «Suite Night Awards», индивидуально Премия «Люкс Ночь» ).
Сайт marriott.com может быть изменен в любое время. Как только участник со статусом Platinum Elite получает право на получение ежегодного привилегии на выбор в течение 50 ночей, он/она должен выбрать ежегодное привилегию на выбор в течение 50 ночей, посетив сайт selection-benefit.marriott.com и выбрав один из привилегий на выбор в течение 50 ночей. Преимущества. Выбор должен быть сделан на сайте selection-benefit.marriott.com и не может быть сделан через службу поддержки участников. Все выбранные ежегодные льготы на выбор за 50 ночей являются окончательными и не могут быть изменены после того, как они были сделаны. В случае, если правомочный участник со статусом Platinum Elite не выберет ежегодное преимущество на выбор в течение 50 ночей до 23:59.м. По восточному времени США 7 января года, следующего за применимым квалификационным периодом, такие участники со статусом Platinum Elite получат пять (5) наград Suite Night Awards™ в качестве своей ежегодной льготы на выбор в течение 50 ночей ( «Suite Night Awards», индивидуально Премия «Люкс Ночь» ).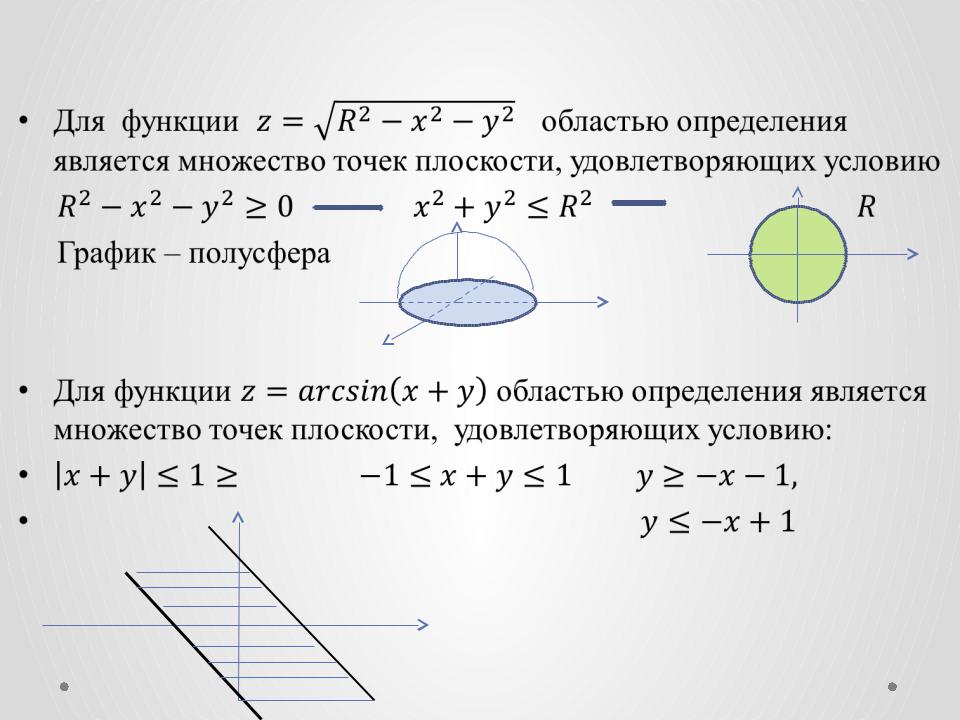


 Подтвержденные сертификаты на сутки в люксе могут быть отменены до 14:00. по местному времени Отеля-участника за один (1) день до прибытия, только если бронирование полностью отменено.
Подтвержденные сертификаты на сутки в люксе могут быть отменены до 14:00. по местному времени Отеля-участника за один (1) день до прибытия, только если бронирование полностью отменено. Отмена подтвержденного бронирования Suite Night Award после 14:00. по местному времени Отеля-участника за один (1) день до прибытия приведет к аннулированию всех наград за сутки в люксе, применимых ко всему бронированию.
Отмена подтвержденного бронирования Suite Night Award после 14:00. по местному времени Отеля-участника за один (1) день до прибытия приведет к аннулированию всех наград за сутки в люксе, применимых ко всему бронированию. Кроме того, сертификаты на сутки в люксе нельзя использовать в некоторых отелях-участниках. Свяжитесь с Центром по работе с клиентами, чтобы получить награду за участие в программе Property Suite Night Award.
Кроме того, сертификаты на сутки в люксе нельзя использовать в некоторых отелях-участниках. Свяжитесь с Центром по работе с клиентами, чтобы получить награду за участие в программе Property Suite Night Award.
 Промокод со скидкой 40 % на матрасы и пружинные блоки Marriott Brands предназначен для одноразового использования и не подлежит передаче другим лицам. Только участник со статусом Platinum Elite, выбравший скидку 40 % на матрасы и пружинные блоки Marriott Brands в качестве годовой привилегии на выбор элитного платинового уровня, сможет воспользоваться промокодом на скидку 40 % на матрасы и пружинные матрасы Marriott Brands.
Промокод со скидкой 40 % на матрасы и пружинные блоки Marriott Brands предназначен для одноразового использования и не подлежит передаче другим лицам. Только участник со статусом Platinum Elite, выбравший скидку 40 % на матрасы и пружинные блоки Marriott Brands в качестве годовой привилегии на выбор элитного платинового уровня, сможет воспользоваться промокодом на скидку 40 % на матрасы и пружинные матрасы Marriott Brands. КНТ. Подготовьте промокод и номер учетной записи участника со статусом Platinum Elite.
КНТ. Подготовьте промокод и номер учетной записи участника со статусом Platinum Elite. Sorenson Hospitality Fund — пожертвование в размере 100 долларов США от Программы лояльности Marriott Bonvoy® в Фонд гостеприимства Арне М. Соренсона США не является облагаемым налогом взносом для соответствующих критериям участников Marriott Bonvoy Elite, которые выбрали это пожертвование в качестве своей ежегодной льготы по выбору. Программа лояльности не может указывать или иным образом гарантировать, как Фонд гостеприимства Арне М. Соренсона потратит пожертвование в размере 100 долларов США. Все средства переводятся из Программы лояльности в Американский фонд поддержки Арне М.Фонд гостеприимства Соренсона.
Sorenson Hospitality Fund — пожертвование в размере 100 долларов США от Программы лояльности Marriott Bonvoy® в Фонд гостеприимства Арне М. Соренсона США не является облагаемым налогом взносом для соответствующих критериям участников Marriott Bonvoy Elite, которые выбрали это пожертвование в качестве своей ежегодной льготы по выбору. Программа лояльности не может указывать или иным образом гарантировать, как Фонд гостеприимства Арне М. Соренсона потратит пожертвование в размере 100 долларов США. Все средства переводятся из Программы лояльности в Американский фонд поддержки Арне М.Фонд гостеприимства Соренсона. Все средства из Программы лояльности переводятся в США.Фонд ЮНИСЕФ. ЮНИСЕФ не поддерживает какую-либо компанию, бренд, продукт или услугу.
Все средства из Программы лояльности переводятся в США.Фонд ЮНИСЕФ. ЮНИСЕФ не поддерживает какую-либо компанию, бренд, продукт или услугу.
 , весь 2023 г., а также январь и февраль 2024 г.Минимальное требование уровня Silver Elite должно быть достигнуто в последующий соответствующий критериям календарный год, чтобы оставаться участником уровня Silver Elite в течение календарного года, следующего за таким последующим годным статусным годом, в противном случае участник будет понижен до следующего уровня в марте календарного года, следующего за таким соответствующим правомочному году. Год статуса. В приведенном выше примере это означает, что для того, чтобы участник продолжал иметь статус Silver Elite после февраля 2024 года, он должен выполнить минимальные требования уровня Silver Elite в течение 2023 года, соответствующего критериям статуса, чтобы продолжать оставаться участником уровня Silver Elite после февраля. 2024 Года приемлемого статуса.
, весь 2023 г., а также январь и февраль 2024 г.Минимальное требование уровня Silver Elite должно быть достигнуто в последующий соответствующий критериям календарный год, чтобы оставаться участником уровня Silver Elite в течение календарного года, следующего за таким последующим годным статусным годом, в противном случае участник будет понижен до следующего уровня в марте календарного года, следующего за таким соответствующим правомочному году. Год статуса. В приведенном выше примере это означает, что для того, чтобы участник продолжал иметь статус Silver Elite после февраля 2024 года, он должен выполнить минимальные требования уровня Silver Elite в течение 2023 года, соответствующего критериям статуса, чтобы продолжать оставаться участником уровня Silver Elite после февраля. 2024 Года приемлемого статуса.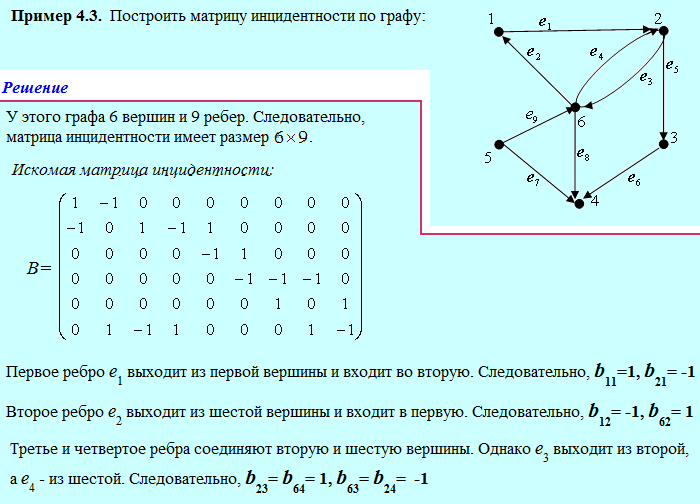
 Ночные кредиты в качестве ежегодной льготы на выбор. Во избежание сомнений, отвечающим критериям календарным годом, в котором зарабатывается ежегодное преимущество выбора, является соответствующий критериям календарный год, за который элитные ночи будут начислены для получения статуса элитного членства.
Ночные кредиты в качестве ежегодной льготы на выбор. Во избежание сомнений, отвечающим критериям календарным годом, в котором зарабатывается ежегодное преимущество выбора, является соответствующий критериям календарный год, за который элитные ночи будут начислены для получения статуса элитного членства.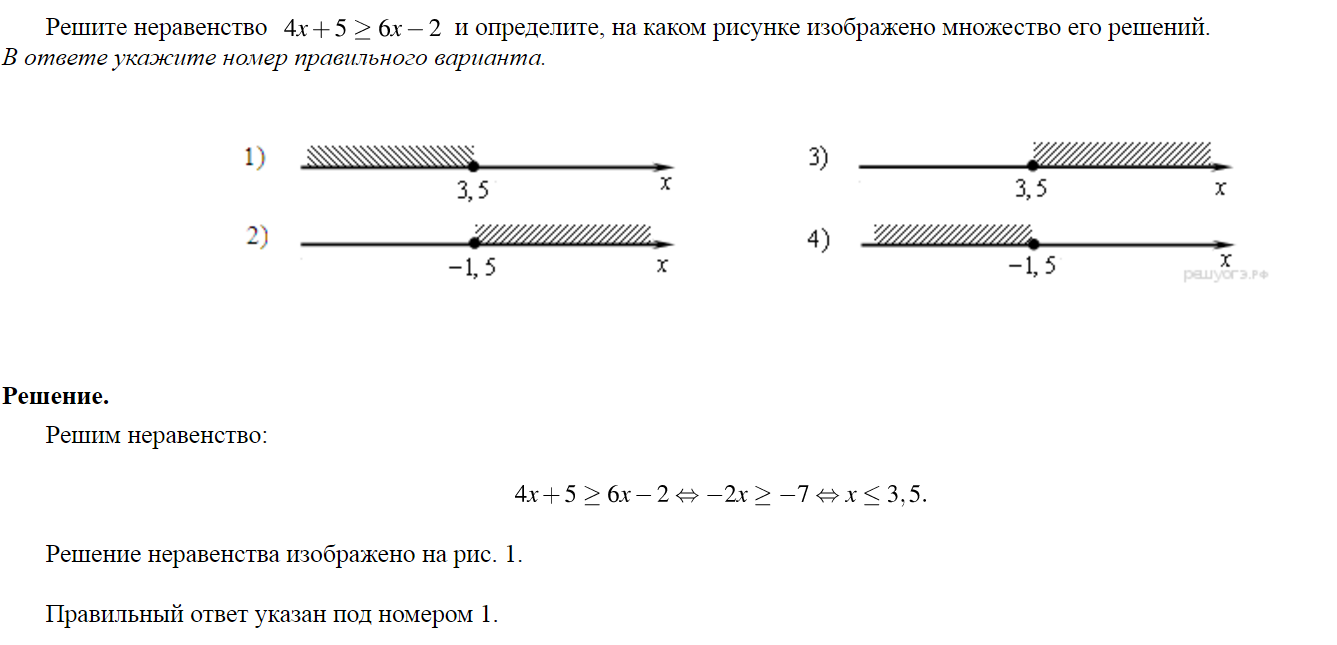 Преимущество гарантированного типа номера не распространяется на повышение категории номера. Гарантированный тип номера недоступен в отелях The Ritz-Carlton, St. Regis, EDITION, Marriott Vacation Club, Marriott Grand Residence Club, Design Hotels™ и Vistana.Гарантированный тип номера предлагается в отелях следующих брендов: The Luxury Collection, W Hotels, JW Marriott, Marriott Hotels, Sheraton, Delta Hotels, Le Méridien, Westin, Autograph Collection, Renaissance Hotels, Tribute Portfolio, Gaylord Hotels, Courtyard, Four Points, SpringHill Suites, Protea Hotels, Fairfield, AC Hotels, Aloft, Moxy, Residence Inn, TownePlace Suites и Element.
Преимущество гарантированного типа номера не распространяется на повышение категории номера. Гарантированный тип номера недоступен в отелях The Ritz-Carlton, St. Regis, EDITION, Marriott Vacation Club, Marriott Grand Residence Club, Design Hotels™ и Vistana.Гарантированный тип номера предлагается в отелях следующих брендов: The Luxury Collection, W Hotels, JW Marriott, Marriott Hotels, Sheraton, Delta Hotels, Le Méridien, Westin, Autograph Collection, Renaissance Hotels, Tribute Portfolio, Gaylord Hotels, Courtyard, Four Points, SpringHill Suites, Protea Hotels, Fairfield, AC Hotels, Aloft, Moxy, Residence Inn, TownePlace Suites и Element. ниже):
ниже):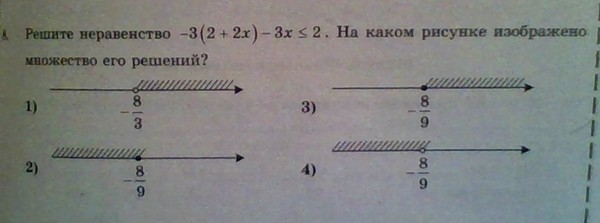
 Гарантированная доступность в течение сорока восьми (48) часов может быть недоступна в определенные ограниченные даты (например,г., особые события). Привилегии Enhanced Room Upgrade не применяются. Преимущество не может быть использовано в сочетании с использованием сертификата «Бесплатные сутки» или любого типа рекламных акций или тарифов со скидкой. Участник должен оплатить преобладающий тариф во время бронирования, а также должны быть соблюдены требования к продолжительности пребывания. Для Residence Inn и TownePlace Suites гарантированная доступность в течение 48 часов распространяется только на номера-студио.
Гарантированная доступность в течение сорока восьми (48) часов может быть недоступна в определенные ограниченные даты (например,г., особые события). Привилегии Enhanced Room Upgrade не применяются. Преимущество не может быть использовано в сочетании с использованием сертификата «Бесплатные сутки» или любого типа рекламных акций или тарифов со скидкой. Участник должен оплатить преобладающий тариф во время бронирования, а также должны быть соблюдены требования к продолжительности пребывания. Для Residence Inn и TownePlace Suites гарантированная доступность в течение 48 часов распространяется только на номера-студио. Сайт marriott.com может быть изменен в любое время. Как только участник Titanium Elite получает право на получение ежегодного привилегии на выбор в течение 75 ночей, он/она должен выбрать годовой привилегии на выбор в течение 75 ночей, посетив сайт selection-benefit.marriott.com и выбрав один из привилегий на выбор в течение 75 ночей. Преимущества. Выбор должен быть сделан на сайте selection-benefit.marriott.com и не может быть сделан через службу поддержки участников. Все выбранные варианты ежегодного преимущества выбора на 75 ночей являются окончательными и не могут быть изменены после того, как они были сделаны. В случае, если соответствующий участник программы Titanium Elite не выберет годовую привилегию на выбор в течение 75 ночей до 23:59.м. По восточному времени США 7 января года, следующего за соответствующим квалификационным периодом, такие участники Titanium Elite получат пять (5) наград Suite Night Awards™ в качестве своего ежегодного привилегии выбора на 75 ночей («Suite Night Awards», по отдельности «Suite Night Awards» награда»).
Сайт marriott.com может быть изменен в любое время. Как только участник Titanium Elite получает право на получение ежегодного привилегии на выбор в течение 75 ночей, он/она должен выбрать годовой привилегии на выбор в течение 75 ночей, посетив сайт selection-benefit.marriott.com и выбрав один из привилегий на выбор в течение 75 ночей. Преимущества. Выбор должен быть сделан на сайте selection-benefit.marriott.com и не может быть сделан через службу поддержки участников. Все выбранные варианты ежегодного преимущества выбора на 75 ночей являются окончательными и не могут быть изменены после того, как они были сделаны. В случае, если соответствующий участник программы Titanium Elite не выберет годовую привилегию на выбор в течение 75 ночей до 23:59.м. По восточному времени США 7 января года, следующего за соответствующим квалификационным периодом, такие участники Titanium Elite получат пять (5) наград Suite Night Awards™ в качестве своего ежегодного привилегии выбора на 75 ночей («Suite Night Awards», по отдельности «Suite Night Awards» награда»). Положения и условия для каждого варианта 75-Annual Choice Benefit перечислены в разделе 4.3.c.(vi), за исключением следующего:
Положения и условия для каждого варианта 75-Annual Choice Benefit перечислены в разделе 4.3.c.(vi), за исключением следующего: Награда на бесплатные сутки не подлежит передаче и не может быть обменена на наличные деньги или конвертирована в баллы. Любая неиспользованная награда за бесплатные сутки будет аннулирована. Пребывание и ночь в рамках сертификата «Бесплатные сутки» учитываются при получении статуса элитного участника. Награды на бесплатные сутки можно комбинировать и добавлять к существующим оплаченным проживаниям или пребываниям на основе наград на бесплатные сутки.
Награда на бесплатные сутки не подлежит передаче и не может быть обменена на наличные деньги или конвертирована в баллы. Любая неиспользованная награда за бесплатные сутки будет аннулирована. Пребывание и ночь в рамках сертификата «Бесплатные сутки» учитываются при получении статуса элитного участника. Награды на бесплатные сутки можно комбинировать и добавлять к существующим оплаченным проживаниям или пребываниям на основе наград на бесплатные сутки.
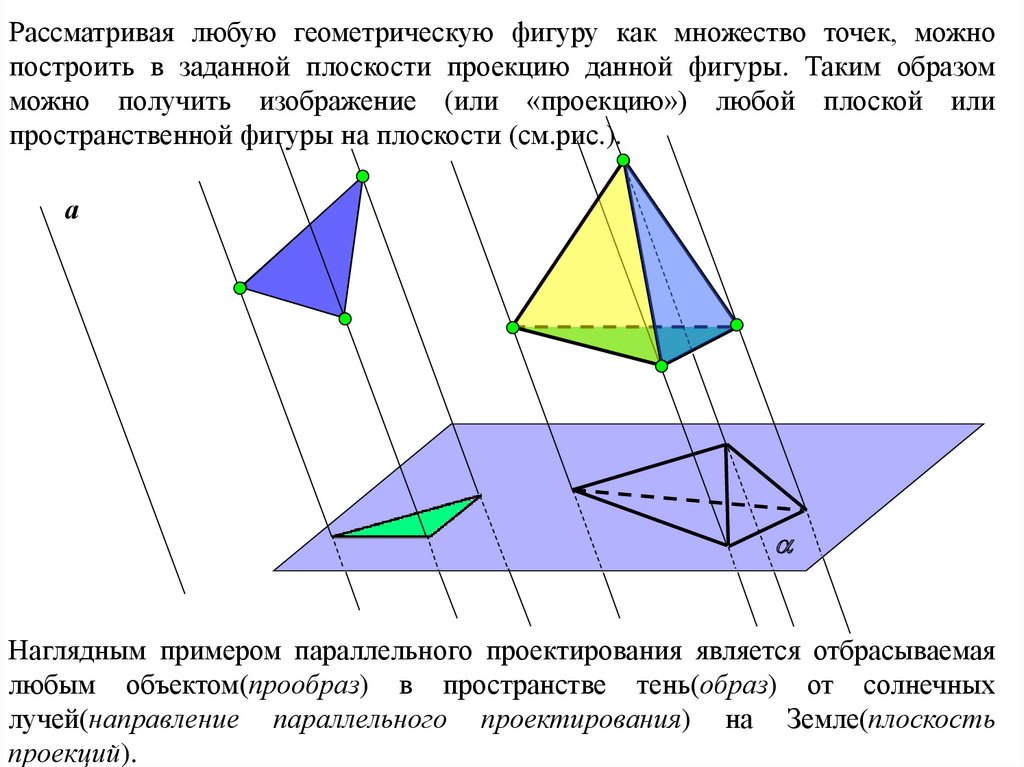 Посольская служба . Участник уровня Ambassador Elite имеет право участвовать в качестве посла в течение соответствующего статусному году и продолжать в течение следующего календарного года. Услуга посла — это преимущество, которое позволяет соответствующему Участнику получать определенные дополнительные преимущества, как описано здесь.
Посольская служба . Участник уровня Ambassador Elite имеет право участвовать в качестве посла в течение соответствующего статусному году и продолжать в течение следующего календарного года. Услуга посла — это преимущество, которое позволяет соответствующему Участнику получать определенные дополнительные преимущества, как описано здесь. Привилегии Your24 также могут быть запрошены правомочным элитным участником программы Ambassador для предстоящего пребывания в любое время до 15:00.м. (по местному времени Отеля-участника) за два (2) дня до прибытия для такого пребывания, связавшись с его/ее послом. Если запрос на льготы Your24 будет одобрен, ваш представитель свяжется с вами и подтвердит время регистрации заезда и отъезда.
Привилегии Your24 также могут быть запрошены правомочным элитным участником программы Ambassador для предстоящего пребывания в любое время до 15:00.м. (по местному времени Отеля-участника) за два (2) дня до прибытия для такого пребывания, связавшись с его/ее послом. Если запрос на льготы Your24 будет одобрен, ваш представитель свяжется с вами и подтвердит время регистрации заезда и отъезда. доступный.
доступный. 00
00 Распределение имеет положительную асимметрию, поскольку ус и полубокс длиннее справа от медианы, чем слева.
Распределение имеет положительную асимметрию, поскольку ус и полубокс длиннее справа от медианы, чем слева. В распределении A есть два потенциальных выброса.
В распределении A есть два потенциальных выброса. На некоторых графиках у вас может быть больше
более одной зависимой переменной, но не более одной независимой
Переменная. Например, вы можете перекрыть графики осадков в
пустыня и осадки в тропиках против времени года, или вы могли бы
график дюймов осадков в 2005 и 2006 годах по сравнению со временем
год.
На некоторых графиках у вас может быть больше
более одной зависимой переменной, но не более одной независимой
Переменная. Например, вы можете перекрыть графики осадков в
пустыня и осадки в тропиках против времени года, или вы могли бы
график дюймов осадков в 2005 и 2006 годах по сравнению со временем
год. Обычно шкала идет от низкого к высокому
легко подсчитываются кратные числа, такие как 10, 50, 100 и т. д. Когда графики сравниваются рядом друг с другом, рассмотрите возможность масштабирования их до одного и того же диапазона данных, чтобы упростить сравнение.
Обычно шкала идет от низкого к высокому
легко подсчитываются кратные числа, такие как 10, 50, 100 и т. д. Когда графики сравниваются рядом друг с другом, рассмотрите возможность масштабирования их до одного и того же диапазона данных, чтобы упростить сравнение. Если на одном графике отображается несколько наборов данных, каждый набор должен быть представлен уникальным символом.
Если на одном графике отображается несколько наборов данных, каждый набор должен быть представлен уникальным символом. в то время как коричневые линии или полосы представляют собой осадки в пустыне.
область.
в то время как коричневые линии или полосы представляют собой осадки в пустыне.
область. В этом случае было бы уместно выразить диапазон вариации вокруг этой точки. Обычно ошибка вокруг среднего значения выражается как стандартное отклонение, но при небольших размерах выборки иногда используется стандартная ошибка.
В этом случае было бы уместно выразить диапазон вариации вокруг этой точки. Обычно ошибка вокруг среднего значения выражается как стандартное отклонение, но при небольших размерах выборки иногда используется стандартная ошибка. Используя функцию многооконного режима, позицию преподавателя, отображаемую в содержании задания, также можно подтвердить в окне 3D-дисплея. Когда функция функциональной безопасности действительна, также может отображаться диапазон функциональной безопасности.
Используя функцию многооконного режима, позицию преподавателя, отображаемую в содержании задания, также можно подтвердить в окне 3D-дисплея. Когда функция функциональной безопасности действительна, также может отображаться диапазон функциональной безопасности. Модификация индуцированного движения незначительна, но достаточна для облегчения выполнения желаемой задачи.
Модификация индуцированного движения незначительна, но достаточна для облегчения выполнения желаемой задачи.
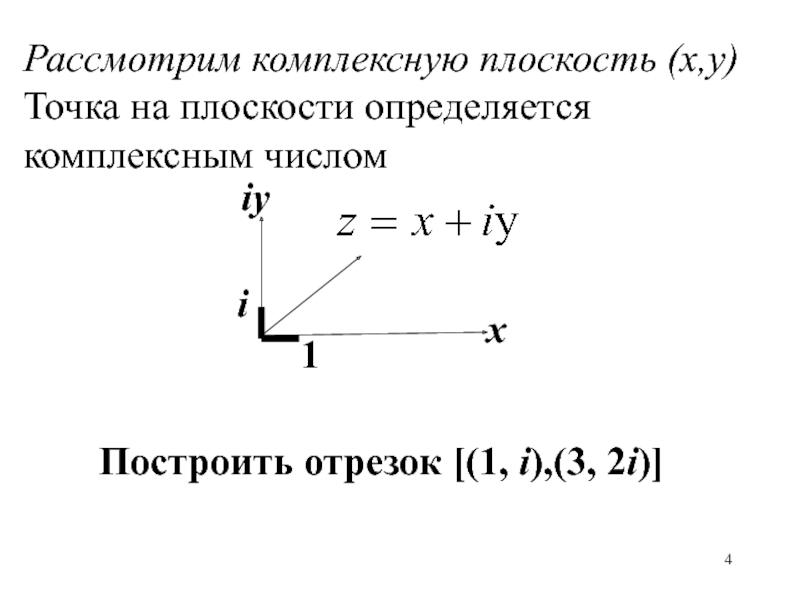 Функция автоматического измерения является альтернативой модели САПР и использует саму руку робота для измерения свойств инструмента. С помощью этой функции пользователь может зарегистрировать нагрузку на инструмент, положение центра тяжести инструмента и момент инерции в центре тяжести.
Функция автоматического измерения является альтернативой модели САПР и использует саму руку робота для измерения свойств инструмента. С помощью этой функции пользователь может зарегистрировать нагрузку на инструмент, положение центра тяжести инструмента и момент инерции в центре тяжести. Это полезно при использовании нескольких роботов или устройств, поскольку позиции, определенные в базовых координатах, будут одинаковыми для всех роботов и устройств. (см. рисунок справа)
Это полезно при использовании нескольких роботов или устройств, поскольку позиции, определенные в базовых координатах, будут одинаковыми для всех роботов и устройств. (см. рисунок справа) Система CAD позволяет создавать трехмерные чертежи основных фигур, точно определять размеры и размещение компонентов, создавать линии заданной длины, ширины или угла, а также удовлетворять различным геометрическим формам.Эта система также позволяет проектировщику тестировать моделируемую деталь при различных напряжениях, нагрузках и т. д.
Система CAD позволяет создавать трехмерные чертежи основных фигур, точно определять размеры и размещение компонентов, создавать линии заданной длины, ширины или угла, а также удовлетворять различным геометрическим формам.Эта система также позволяет проектировщику тестировать моделируемую деталь при различных напряжениях, нагрузках и т. д.Иерархическая кластеризация не требует от нас указания количества кластеров, и мы даже можем выбрать, какое количество кластеров выглядит лучше всего, поскольку мы строим дерево. Кроме того, алгоритм не чувствителен к выбору метрики расстояния; все они, как правило, работают одинаково хорошо, тогда как с другими алгоритмами кластеризации выбор метрики расстояния имеет решающее значение.