Кинематика (физика) — это… Что такое Кинематика (физика)?
У этого термина существуют и другие значения, см. Кинематика.Кинема́тика (греч. κινειν — двигаться) в физике — раздел механики, изучающий математическое описание (средствами геометрии, алгебры, математического анализа…) движения идеализированных тел (материальная точка, абсолютно твердое тело, идеальная жидкость), без рассмотрения причин движения (массы, сил и т. д.). Исходные понятия кинематики — пространство и время. Например, если тело движется по окружности, то кинематика предсказывает необходимость существования центростремительного ускорения без уточнения того, какую природу имеет сила, его порождающая. Причинами возникновения механического движения занимается другой раздел механики — динамика.
Различают классическую кинематику, в которой пространственные (длины отрезков) и временные (промежутки времени) характеристики движения считаются абсолютными, то есть не зависящими от выбора системы отсчёта, и релятивистскую. В последней длины отрезков и промежутки времени между двумя событиями могут изменяться при переходе от одной системы отсчёта к другой. Относительной становится также одновременность. В релятивистской механике вместо отдельных понятий пространство и время вводится понятие пространства-времени, в котором инвариантным относительно преобразований Лоренца является величина, называемая интервалом.
История кинематики
Долгое время понятия о кинематике были основаны на работах Аристотеля, в которых утверждалось, что скорость падения пропорциональна весу тела, а движение в отсутствие сил невозможно. Только в конце XVI века этим вопросом подробно занялся Галилео Галилей. Изучая свободное падение (знаменитые опыты на Пизанской башне) и инерцию тел, он доказал неправильность идей Аристотеля. Итоги своей работы по данной теме он изложил в книге «Беседы и математические доказательства, касающиеся двух новых отраслей науки, относящихся к механике и местному движению»[1].
Рождением современной кинематики можно считать выступление Пьера Вариньона перед Французской Академией наук 20 января 1700 года. Тогда впервые были даны понятия скорости и ускорения в дифференциальном виде.
В XVIII веке Ампер первый использовал вариационное исчисление в кинематике.
После создания СТО, показывающей, что время и пространство не абсолютны и скорость имеет принципиальное ограничение, кинематика вошла в новый этап развития в рамках релятивистской механики (см. Релятивистская кинематика).
Основные понятия кинематики
Задачи кинематики
Главной задачей кинематики является математическое (уравнениями, графиками, таблицами и т. п.) определение положения и характеристик движения точек или тел во времени. Любое движение рассматривается в определённой системе отсчёта. Также кинематика занимается изучением составных движений (движений в двух взаимно перемещающихся системах отсчёта).
Положение точки (или тела) относительно заданной системы отсчёта определяется некоторым количеством взаимно независимых функций координат:
- ,
где определяется количеством степеней свободы. Так как точка не может быть в нескольких местах одновременно, все функции должны быть однозначными. Также в классической механике выдвигается требование их дифференцируемости на промежутках. Производные этих функций определяют скорость тела[2].
Скорость движения определяется как производная координат по времени:
- ,
где — единичные векторы, направленные вдоль соответствующих координат.
Ускорение определяется как производная скорости по времени:
Следовательно, характер движения можно определить, зная зависимость скорости и ускорения от времени. А если кроме этого известны ещё и значения скорости/координат в определённый момент времени, то движение полностью задано.
Деление кинематики по типам объекта исследования
В зависимости от свойств изучаемого объекта, кинематика делится на кинематику точки, кинематику твёрдого тела, кинематику деформируемого тела, кинематику газа, кинематику жидкости и т. д.
Кинематика точки
Основная статья: Кинематика точки
Кинематика точки изучает движение материальных точек — тел, размерами которых можно пренебречь по сравнению с характерными размерами изучаемого явления. Поэтому в кинематике точки скорость, ускорение, координаты всех точек тела считаются равными.
Частные случаи движения в кинематике точки:
- Если ускорение равно нулю, движение прямолинейное (траектория представляет собой прямую) и равномерное (скорость постоянна).
- ,
где — длина пути траектории за промежуток времени от до , — проекции на соответствующие оси координат.
- Если ускорение постоянно и лежит в одной прямой со скоростью, движение прямолинейное, равнопеременное (равноускоренное, если ускорение и скорость направлены в одном направлении;
- ,
где — длина пути траектории за промежуток времени от до , — проекции на соответствующие оси координат, — проекции на соответствующие оси координат.
- Если ускорение постоянно и перпендикулярно скорости, движение происходит по окружности — вращательное движение.
- ,
где — радиус окружности, по которой движется тело.
Если выбрать систему декартовых координат xyz так, чтобы центр координат был в центре окружности, по которой движется точка, оси y и x лежали в плоскости этой окружности, так чтобы движение осуществлялось против часовой стрелки, то значения координат можно вычислить по формулам:
Для перехода в другие системы координат используются преобразования Галилея для скоростей намного меньших скорости света, и преобразования Лоренца для скоростей, сравнимых со скоростью света.
- Если ускорение постоянно и не лежит на одной прямой с начальной скоростью, движение параболическое.
Если выбрать систему декартовых координат xyz так, чтобы ускорение и начальная скорость лежали в плоскости xy и ускорение было сонаправленно с осью y, то значения координат можно вычислить по формулам:
- ,
где и — проекции на соответствующие оси.
Для перехода в другие системы координат используются преобразования Галилея для скоростей намного меньших скорости света, и преобразования Лоренца для скоростей, сравнимых со скоростью света.
- Если тело выполняет разные движения в разных направлениях, то эти движения могут рассчитываться отдельно и складываться по принципу суперпозиции. Например, если в одной плоскости тело совершает вращательное движение, а по оси, перпендикулярной этой плоскости — равномерное поступательное, то вид движения — винтовая линия с постоянным шагом.
- В общем виде скорость, ускорение и координаты вычисляются по общим формулам (см. задачи кинематики), путь вычисляется по формуле:
Кинематика твёрдого тела
Кинематика твёрдого тела изучает движение абсолютно твёрдых тел (тел, расстояние между двумя любыми точками которого не может изменяться).
Так как любое тело ненулевого объёма имеет бесконечное число точек, и соответственно бесконечное число фиксированных связей между ними, тело имеет 6 степеней свободы и его положение в пространстве определяется шестью координатами (если нет дополнительных условий).
Связь скорости двух точек твердого тела выражается через формулу Эйлера:
- ,
где — вектор угловой скорости тела.
Кинематика деформируемого тела, Кинематика жидкости
Основные статьи: Кинематика деформируемого тела, Кинематика жидкости
Кинематика деформируемого тела и кинематика жидкости относятся к кинематике непрерывной среды.
Кинематика газа
Основная статья: Кинематика газа
Кинематика газа изучает деление газа на скопления при движении и описывает движение этих скоплений. В рамках кинематики газа описываются не только основные параметры движения, но и типы движения газа.
Примечания
Литература
- Алешкевич В. А., Деденко Л. Г., Караваев В. А. Механика твердого тела. Лекции. — М.: Изд-во Физического факультета МГУ, 1997.
- Матвеев. А. Н. Механика и теория относительности. — М.: Высшая школа, 1986. (3-е изд. М.: ОНИКС 21 век: Мир и Образование, 2003. — 432с.)
- Павленко Ю. Г. Лекции по теоретической механике. — М.: ФИЗМАТЛИТ, 2002. — 392 с.
- Сивухин Д. В. Общий курс физики. В 5 т. Том I. Механика. 4-е изд. — М.: ФИЗМАТЛИТ; Изд-во МФТИ, 2005. — 560с.
- Стрелков С. П. Механика. — М.: Наука, 1975.
- Яворский Б. М., Детлаф А. А.
Кинематика. Механическое движение. Система отсчета. Материальная точка. Траектория. Путь
Сегодня мы поговорим о систематическом изучении физики и первом ее разделе – механике. Физика изучает разные виды изменений или процессов, происходящих в природе, а какие процессы в первую очередь интересовали наших предков? Конечно, это процессы, связанные с движением. Им было интересно, долетит ли копье, которое они бросили, и попадет ли оно в мамонта; им было интересно, успеет ли гонец с важной вестью добежать до заката к соседней пещере. Все эти виды движения и вообще механическое движение как раз и изучает раздел, который называется механика.
Куда бы мы ни посмотрели – вокруг нас масса примеров механического движения: что-то вращается, что-то прыгает вверх-вниз, что-то движется вперед-назад, а другие тела могут находиться в состоянии покоя, которое тоже является примером механического движения, скорость которого равна нулю.
Определение
Механическим движением называется изменение положения тел в пространстве относительно других тел с течением времени (рис. 1).
Рис. 1. Механическое движение
Как физика делится на несколько разделов, так и механика имеет свои разделы. Первый из них называется кинематика. Раздел механики кинематика отвечает на вопрос, как движется тело. Прежде чем начать работать над изучением механического движения, необходимо определить и выучить основные понятия, так называемую азбуку кинематики. На уроке мы научимся:
— выбирать систему отсчета для изучения движения тела;
— упрощать задачи, мысленно заменяя тело материальной точкой;
— определять траекторию движения, находить путь;
— различать виды движений.
В определении механического движения особое значение имеет выражение относительно других тел. Нам всегда необходимо выбрать так называемое тело отсчета, то есть тело, относительно которого мы будем рассматривать движение исследуемого нами объекта. Простой пример: подвигайте рукой и скажите – движется ли она? Да, конечно, по отношению к голове, но по отношению к пуговице на вашей рубашке она будет недвижима. Поэтому выбор отсчета очень важен, ведь относительно некоторых тел движение совершается, а относительно других тел движения не происходит. Чаще всего телом отсчета выбирают тело, которое всегда есть под руками, точнее под ногами, – это наша Земля, которая является телом отсчета в большинстве случаев.
Издавна ученые спорили о том, Земля ли вращается вокруг Солнца или Солнце вращается вокруг Земли. На самом деле, с точки зрения физики, с точки зрения механического движения это всего лишь спор о теле отсчета. Если телом отсчета считать Землю, то да – Солнце вращается вокруг Земли, если телом отсчета считать Солнце – то Земля вращается вокруг Солнца. Поэтому тело отсчета – это важное понятие.
Как же описывать изменение положения тела?
Чтобы точно задать положение интересующего нас тела относительно тела отсчета, надо связать с телом отсчета систему координат (рис. 2).

Рис. 2. Декартовая система координат
При движении тела координаты меняются, а для того чтобы описать их изменение, нам необходим прибор для измерения времени. Чтобы описывать движение, нужно иметь:
— тело отсчета;
— связанную с телом отсчета систему координат;
— прибор для измерения времени (часы).
Все эти объекты составляют вместе систему отсчета. До тех пор пока мы не выбрали систему отсчета, не имеет смысла описывать механическое движение – мы не будем уверены в том, как движется тело. Простой пример: чемодан, лежащий на полке в купе поезда, который движется, для пассажира просто покоится, а для человека, стоящего на перроне, движется. Как мы видим, одно и то же тело и движется, и покоится, вся проблема в том, что системы отсчета различны (рис. 3).
Рис. 3. Различные системы отчета
Зависимость траектории от выбора системы отсчета
Ответим на интересный и важный вопрос, зависит ли форма траектории и пройденный телом путь от выбора системы отсчета. Рассмотрим ситуацию, когда есть пассажир поезда, радом с которым на столе стоит стакан с водой. Какой же будет траектория стакана в системе отчета, связанной с пассажиром (телом отсчета является пассажир)?
Конечно, относительно пассажира стакан неподвижен. Это значит, что траектория является точкой, а перемещение равно  (рис. 4).
(рис. 4).

Рис. 4. Траектория стакана относительно пассажира в поезде
Какой же будет траектория стакана относительно пассажира, который ожидает поезда на перроне? Для этого пассажира будет казаться, что стакан движется по прямой линии и у него ненулевой путь (рис. 5).

Рис. 5. Траектория стакана относительно пассажира на перроне
Из вышесказанного можно сделать вывод, что траектория и путь зависят от выбора системы отсчета.
Для того чтобы описывать механическое движение, в первую очередь необходимо определиться с системой отсчета.
Движение изучается нами для того, чтобыпредсказать, где окажется тот или иной объект в необходимый момент времени. Основная задача механики – определить положение тела в любой момент времени. Что же значит описать движение тела?
Рассмотрим пример: автобус едет из Москвы в Санкт-Петербург (рис. 6). Важны ли нам размеры автобуса по сравнению с расстоянием, которое он преодолеет?
Рис. 6. Движение автобуса из Москвы в Санкт-Петербург
Конечно же, размерами автобуса в данном случае можно пренебречь. Мы можем описывать автобус как одну движущуюся точку, по-другому ее называют материальной точкой.
Определение
Тело, размерами которого в данной задаче можно пренебречь, называют материальной точкой.
Одно и то же тело, в зависимости от условий задачи, может быть или не быть материальной точкой. При перемещении автобуса из Москвы в Санкт-Петербург автобус можно считать материальной точкой, ведь его размеры несопоставимы с расстоянием между городами. Но если в салон автобуса влетела муха и мы хотим исследовать ее движение, тогда в этом случае нам важны размеры автобуса, и он уже не будет являться материальной точкой.
Чаще всего в механике мы будем изучать именно движение материальной точки. При своем перемещении материальная точка последовательно проходит положение вдоль некоторой линии.
Определение
Линия, вдоль которой движется тело (или материальная точка), называется траекторией движения тела (рис. 7).
Рис. 7. Траектория точки
Иногда мы наблюдаем траекторию (например, процесс выставления оценки за урок), но чаще всего траектория – это какая-то воображаемая линия. При наличии средств измерения мы можем замерить длину траектории, вдоль которой двигалось тело, и определим величину, которая называется путь (рис. 8).
Определение
Путь, пройденный телом за некоторое время, – это длина участка траектории.
Рис. 8. Путь
Разделяют два основных вида движения – это прямолинейное и криволинейное движение.
Если траектория тела – это прямая линия, то движение называется прямолинейным. Если тело движется по параболе или по любой другой кривой – мы говорим о криволинейном движении. При рассмотрении движения не просто материальной точки, а движения реального тела различают еще два вида движения: поступательное движение и вращательное движение.
Поступательное и вращательное движение. Пример
Какие же движения называются поступательными, а какие – вращательными? Рассмотрим этот вопрос на примере колеса обозрения. Как движется кабина колеса обозрения? Отметим две произвольные точки кабины и соединим их прямой. Колесо вращается. Через некоторое время отметим те же точки и соединим их. Полученные прямые будут лежать на параллельных прямых (рис. 9).
Рис. 9. Поступательное движение кабины колеса обозрения
Если прямая, проведенная через любые две точки тела, при движении остается параллельной сама себе, то такое движение называют поступательным.
В противном случае мы имеем дело с вращательным движением. Если бы прямая не была параллельной сама тебе, то пассажир, скорее всего, вывалился бы из кабины колеса (рис. 10).
Рис. 10. Вращательное движение кабины колеса
Вращательным называют такое движение тела, при котором его точки описывают окружности, лежащие в параллельных плоскостях. Прямая, соединяющая центры окружностей, называется осью вращения.
Очень часто нам приходится сталкиваться с комбинацией поступательного и вращательного движения, так называемым поступательно-вращательным движением. Самый простой пример такого движения – это движение прыгуна в воду (рис. 11). Он выполняет вращение (сальто), но при этом центр его масс поступательно движется в направлении воды.
Рис. 11. Поступательно-вращательное движение
Мы сегодня изучили азбуку кинематики, то есть основные, самые важные понятия, которые в дальнейшем позволят нам перейти к решению главной задачи механики – определению положения тела в любой момент времени.
Список литературы
- Тихомирова С.А., Яворский Б.М. Физика (базовый уровень) – М.: Мнемозина, 2012.
- Генденштейн Л.Э., Дик Ю.И. Физика 10 класс. – М.: Мнемозина, 2014.
- Кикоин И.К., Кикоин А.К. Физика – 9, Москва, Просвещение, 1990.
Дополнительные рекомендованные ссылки на ресурсы сети Интернет
- Интернет-портал «Av-physics.narod.ru» (Источник).
- Интернет-портал «Rushkolnik.ru» (Источник).
- Интернет-портал «Testent.ru» (Источник).
Домашнее задание
Подумайте, что является телом отсчета, когда мы говорим:
- книга неподвижно лежит на столике в купе движущегося поезда;
- стюардесса после взлета проходит по пассажирскому салону самолета;
- Земля вращается вокруг своей оси.
2.1. Кинематика. Механика. Физика. Курс лекций
2.1.1. Механическое движение. Физические модели реальных тел, используемые в механике. Система отсчета. Траектория. Виды движений
2.1.2. Кинематические уравнения движения. Длина пути и вектор перемещения
2.1.3. Кинематические характеристики. Скорость
2.1.4. Кинематические характеристики. Ускорение
2.1.5. Поступательное и вращательное движение твердого тела
2.1.6. Связь между кинематическими характеристиками при различных видах движений
2.1.1. Механическое движение. Физические модели реальных тел, используемые в механике. Система отсчета. Траектория. Виды движений
1. Механическое движение — изменение положения тела или отдельных его частей в пространстве с течением времени.
Внутреннее строение движущихся тел, их химический состав не влияет на механическое движение. Для описания движения реальных тел в зависимости от условий задачи пользуются различными моделями: материальная точка, абсолютно твердое тело, абсолютно упругое тело, абсолютно неупругое тело и т.д.
Материальной точкой называется тело, размерами и формой которого можно пренебречь в условиях данной задачи. В дальнейшем вместо термина «материальная точка» будем употреблять термин «точка». Одно и то же тело можно свести к материальной точке в одной задаче, и необходимо учитывать его размеры в условиях другой задачи. Например, расчет движения самолета, летящего над Землей, можно производить, считая его материальной точкой. А при расчете обтекания воздухом крыла того же самолета надо учитывать форму и размеры крыла.
Любое протяженное тело можно рассматривать как систему материальных точек.
Абсолютно твердое тело (а.т.т.) — тело, деформацией которого можно пренебречь в условиях данной задачи. А.т.т. можно рассматривать как систему жестко связанных между собой материальных точек, т.к. расстояние между ними не изменяются при любых взаимодействиях.
Абсолютно упругое тело — тело, деформация которого подчиняется закону Гука (см. § 2.2.2.), и после прекращения силового воздействия оно полностью восстанавливает первоначальные размеры и форму.
Абсолютно неупругое тело — тело, которое после прекращения силового воздействия на него не восстанавливается, а полностью сохраняет деформированное состояние.
2. Для определения положения тела в пространстве и во времени надо ввести понятие системы отсчета. Выбор системы отсчета произволен.
Системой отсчета называется тело или группа тел, считающиеся условно неподвижными и снабженные устройством отсчета времени (часами, секундомером и т.д.), относительно которых рассматривается движение данного тела.
Неподвижное тело (или группу тел) называют телом отсчета и для удобства описания движения с ним связывают систему координат (декартову, полярную, цилиндрическую и т.д.).
Выберем в качестве системы координат декартову прямоугольную систему XYZ (подробно см.[8]). Положение точки С в пространстве можно определить координатами х, y, z (Рисунок 1).
Рисунок 1 — Определение положения точки в декартовой системе координат
Однако положение той же точки в пространстве можно задать с помощью одной векторной величины r = r(x, y, z), называемой радиус-вектором точки С (Рисунок 1).
3. Линия, которую тело описывает при своем движении, называется траекторией. По виду траектории движения можно разделить на прямолинейные и криволинейные. Траектория зависит от выбора системы отсчета. Так, траектория движения точек винта самолета относительно летчика — окружность, а относительно Земли — винтовая линия. Другой пример: какова траектория движения кончика иглы проигрывателя относительно пластинки? корпуса проигрывателя? корпуса звукоснимателя? Ответы таковы: спираль, дуга окружности, состояние покоя (игла неподвижна).
2.1.2. Кинематические уравнения движения. Длина пути и вектор перемещения
1. При движении тела относительно выбранной системы координат его положение изменяется с течением времени. Движение материальной точки будет полностью определено, если заданы непрерывные и однозначные функции времени t:
x = x(t), y = y(t), z = z(t).
Эти уравнения описывают изменение координат точки от времени и называются кинематическими уравнениями движения.
2. Путь — часть траектории, пройденной телом за определенный промежуток времени. Момент времени t0, от которого начинается его отсчет, называется начальным моментом времени, обычно t0=0 в силу произвольного выбора начала отсчета времени.
Длиной пути называется сумма длин всех участков траектории. Длина пути не может быть величиной отрицательной, она всегда положительна. Например, материальная точка переместилась из точки траектории С сначала в точку А, а затем в точку В (Рисунок 1). Длина ее пути равна сумме длин дуги СА и дуги АВ.
2.1.3. Кинематические характеристики. Скорость
1. Для характеристики быстроты движения тел в физике вводится понятие скорости. Скорость — вектор, а значит, характеризуется величиной, направлением, точкой приложения.
Рассмотрим движение вдоль оси Х. Положение точки будет определяться изменением со временем координаты Х.
Если за время ∆ произошло перемещение точки на ∆r, то величина  является средней скоростью движения:
является средней скоростью движения:  .
.
Средней скоростью движущегося тела называется вектор, равный отношению вектора перемещения к величине промежутка времени, за которое это перемещение произошло.
Модуль средней скорости есть физическая величина, численно равная изменению пути за единицу времени.
2. Для определения скорости в данный момент времени, мгновенной скорости, нужно рассмотреть интервал времени ∆t→0, тогда
Используя понятие производной, можно записать для скорости
Скорость тела в данный момент времени называется мгновенной скоростью (или просто скоростью).
Вектор V мгновенной скорости направлен по касательной к траектории в сторону движения тела.
2.1.4. Кинематические характеристики. Ускорение
1. Быстрота изменения вектора скорости характеризуется величиной, называемой ускорением. Ускорение может возникнуть как за счет изменения величины скорости, так и за счет изменения направления скорости.
Пусть в момент времени t скорость тела равна v1, а через промежуток времени ∆t в момент времени t + ∆t равна v2, приращение вектора скорости за ∆t равно ∆v.
Средним ускорением тела в интервале времени от t до t + ∆t называется вектор аср, равный отношению приращения вектора скорости ∆v к промежутку времени ∆t: 
Cреднее ускорение есть физическая величина, численно равная изменению скорости за единицу времени.
2. Для определения ускорения в данный момент времени, т.е. мгновенного ускорения, нужно рассмотреть малый интервал времени ∆t→0. Тогда вектор мгновенного ускорения равен пределу вектора среднего ускорения при стремлении промежутка времени ∆t к нулю:
Используя понятие производной, можно дать для ускорения следующее определение: Ускорением (или мгновенным ускорением) тела называется векторная величина а, равная первой производной по времени от скорости тела v или второй производной по времени от пути.
3. При вращении точки по окружности ее скорость может изменяться по величине и по направлению (рисунок 2)
Рисунок 2 — Изменение скорости точки при вращении по окружности
На рисунке 2 в положении 1 скорость точки v1, в положении 2 скорость точки v2. Модуль скорости v2 больше модуля скорости v1 , ∆v— вектор изменения скорости ∆v = v2 —v1
Вращающаяся точка имеет тангенциальное ускорение, равное аτ=dv/dt, оно изменяет скорость по величине и направлено по касательной к траектории; и нормальное ускорение, равное аn= v2/R, оно меняет направление скорости и направлено по радиусу окружности (R) (см. Pисунок 3)
Рисунок 3 — Полное, тангенциальное и нормальное ускорения вращающейся точки
Вектор полного ускорения равен  , т.е. он может быть представлен как сумма векторов тангенциального aτ и нормального an ускорений. Модуль полного ускорения равен:
, т.е. он может быть представлен как сумма векторов тангенциального aτ и нормального an ускорений. Модуль полного ускорения равен:
2.1.5. Поступательное и вращательное движение абсолютно твердого тела
1. До сих пор речь шла о характере движения, о траектории, о кинематических характеристиках, но не рассматривалось само движущееся тело. Пример. Движется автомобиль. Он является сложным телом. Движения его кузова и колес различны. Если тело сложное, то возникает вопрос: к движению каких частей тела относятся понятия пути, скорости, ускорения, введенные ранее?
Прежде, чем ответить на этот вопрос, надо выделить формы механического движения. Каким бы сложным не было движение тела, его можно свести к двум основным: поступательному движению и вращению вокруг неподвижной оси. Колебательное движение будет рассмотрено отдельно. В примере с автомобилем поступательно движется кузов автомобиля. Сам автомобиль является телом, которое может быть рассмотрено с помощью модели абсолютно твердого тела (а.т.т.). Для краткости мы будем называть абсолютно твердое тело просто твердое тело.
Поступательным движением твердого тела называется движение, при котором любая прямая, проведенная между его двумя точками, остается при движении параллельна самой себе.
Поступательное движение может быть и не прямолинейным движением.
Примеры. 1) В аттракционе «Колесо обозрения» кабинки — люльки, в которых сидят люди, двигаются поступательно. 2) Если стакан с водой перемещать по траектории, представленной на рисунке 5 так, чтобы поверхность воды и направляющая стакана составляли бы прямой угол, то движение стакана является не прямолинейным, но поступательным. Прямая АВ остается при движении стакана параллельна самой себе.
Рисунок 4 — Пример поступательного движения твердого тела.
Особенностью поступательного движения твердого тела является то, что все точки тела описывают одинаковую траекторию, проходят за определенные промежутки времени ∆t одинаковые пути и в любой момент времени имеют одинаковые скорости. Поэтому кинематическое рассмотрение поступательного движения твердого тела сводится к изучению движения любой из его точек. Поступательное движение тела может быть сведено к движению материальной точки. В динамике обычно за такую точку принимают центр масс тела. Кинематические характеристики и кинематические уравнения, вводимые для материальной точки, описывают и поступательное движение твердого тела.
2. Движение колес автомобиля отличается от движения кузова. Точки колеса, находящиеся на разных расстояниях от его оси, описывают разные траектории, проходят различные пути и имеют разные скорости. Чем дальше точка находится от оси колеса, тем больше ее скорость, тем больший путь она проходит за определенный промежуток времени. Движение, в котором участвуют колеса автомобиля, называется вращательным. Ясно, что модель материальной точки для описания вращения реального тело не подходит. Но и здесь вместо реального тела (например, колеса автомобиля с деформируемыми шинами и т.д.) используют физическую модель — абсолютно твердое тело.
Вращательным движением твердого тела называется движение, когда все точки тела описывают окружности, центры которых лежат на прямой, называемой осью вращения и перпендикулярной к плоскостям, в которых вращаются точки тела (Рисунок 5).
Так как для разных точек вращающегося тела траектории, пути, скорости различны, то встает вопрос: можно ли найти физические величины, которые имели бы одинаковые значения для всех точек вращающегося тела, Да, оказывается, есть такие величины, они называются угловыми.
Рисунок 5 — Вращение твердого тела
Твердое тело, вращающееся вокруг неподвижной оси, имеет одну степень свободы, его положение в пространстве полностью определяется значением угла поворота ∆φ из некоторого начального положения (Рисунок 5). Все точки твердого тела повернутся за промежуток времени ∆ на угол ∆φ.
При малых промежутках времени, когда углы поворота невелики, их можно рассматривать как векторы, хотя и не совсем обычные. Вектор элементарного (бесконечно малого) угла поворота ∆φ направлен вдоль оси вращения по правилу правого буравчика, его модуль равен углу поворота (Рисунок 5). Вектор ∆φ называется угловым перемещением.
Правило правого буравчика заключается в следующем:
Если рукоятка правого буравчика вращается вместе с телом (точкой), то поступательное движение буравчика совпадает с направлением ∆φ.
Другая формулировка правила: Из конца вектора ∆φ видно, что движение точки (тела) происходит против часовой стрелки.
Положение тела в любой момент времени t определяется кинематическим уравнением вращательного движения ∆φ = ∆φ(t).
3. Для характеристики быстроты вращения служит угловая скорость.
Средней угловой скоростью называется физическая величина, равная отношению углового перемещения к промежутку времени, за которое это перемещение произошло

Предел, к которому стремится средняя угловая скорость при ∆→0, называется мгновенной угловой скоростью тела в данный момент времени или просто угловой скоростью вращения твердого тела (точки).
Угловая скорость равна первой производной от углового перемещения по времени. Направление мгновенной угловой скорости определяется по правилу правого буравчика и совпадает с направлением ∆φ (Рисунок 6). Кинематическое уравнение движения для угловой скорости имеет вид ω = ω (t).
Рисунок 6 — Направление векторов угловых характеристик при вращательном движении.
4. Для характеристики быстроты изменения угловой скорости тела при неравномерном вращении вводится вектор углового ускорения β, равный первой производной от его угловой скорости ω по времени t.

Среднее угловое ускорение есть величина отношения изменения угловой скорости ∆ω к промежутку времени ∆t, за которое это изменение произошло β ср = ∆ω/∆t
Вектор углового ускорения направлен вдоль оси вращения и совпадает с направлением угловой скорости, если движение ускоренное, и противоположен ему, если вращение замедленное (Рисунок 6).
5. При вращательном движении твердого тела все его точки двигаются так, что вращательные характеристики (угловое перемещение, угловая скорость, угловое ускорение) для них одинаковы. А линейные характеристики движения зависят от расстояния точки до оси вращения.
Связь между этими величинами v, ω, r задается следующим соотношением:
v = [ω∙r],
т.е. линейная скорость v любой точки С твердого тела, вращающегося вокруг неподвижной оси с угловой скоростью ω, равна векторному произведению ω на радиус-вектор r точки С относительно произвольной точки О на оси вращения.
Подобное соотношение существует между линейным и угловым ускорениями вращающейся точки твердого тела:
а = [β∙r].
2.1.6. Связь между кинематическими характеристиками при различных видах движений
По зависимости скорости и ускорения от времени все механические движения делятся на равномерное, равнопеременное (равноускоренное и равнозамедленное) и неравномерное.
Рассмотрим кинематические характеристики и кинематические уравнения, введенные в предыдущих параграфах, для разных видов движений.
1. Прямолинейное движение
Прямолинейное равномерное движение.
Направление движения задается осью ОХ.
Ускорение а = 0 (аn = 0, аτ = 0), скорость v = const, путь s = v∙t, координата x = x0 v∙t, где x0 — начальная координата тела на оси ОХ.
v∙t, где x0 — начальная координата тела на оси ОХ.
Путь — величина всегда положительная. Координата может быть и положительной и отрицательной, поэтому в уравнении, задающем зависимость координаты от времени, перед величиной v∙t в уравнении стоит знак плюс, если направление оси ОХ и направление скорости совпадают, и знак минус, если они противоположно направлены.
Прямолинейное равнопеременное движение.
Ускорение а = аτ = const, аn = 0, скорость  , путь
, путь  , координата
, координата  .
.
Перед величиной (at) в кинематическом уравнении для скорости знак плюс соответствует равноускоренному движению, а знак минус — равнозамедленному движению. Это замечание верно и для кинематического уравнения пути, разные знаки перед величинами (at2/2) соответствуют разным видам равнопеременного движения.
В уравнении для координаты знак перед (v0t) может быть и плюс, если направления v0 и оси ОХ совпадают, и минус, если они направлены в разные стороны.
Разные знаки перед величинами  соответствуют равноускоренному или равнозамедленному движениям.
соответствуют равноускоренному или равнозамедленному движениям. 
Прямолинейное неравномерное движение.
Ускорение а = аτ>≠ const, аn = 0,
скорость  , путь
, путь  .
.
2. Поступательное движение
Для описания поступательного движения можно использовать законы, приведенные в §2.1.6. (пункт 2) или §2.1.4. (пункт3). Использование тех или иных законов для описания поступательного движения зависит от его траектории. Для прямолинейной траектории используются формулы из §2.1.6. (пункт 2), для криволинейной — §2.1.4. (пункт3).
3. Вращательное движение
Отметим, что решение всех задач на вращательное движение твердого тела вокруг неподвижной оси аналогично по форме задачам на прямолинейное движение точки. Достаточно заменить линейные величины s, vх, aх на соответствующие угловые величины φ, ω, β, и мы получим все закономерности и соотношения для вращающегося тела.
Равномерное вращение по окружности
(R — радиус окружности).
Ускорение: полное а = аn, нормальное  , тангенциальное аτ = 0, угловое β = 0.
, тангенциальное аτ = 0, угловое β = 0.
Скорость: угловая ω = const, линейная v = ωR = const.
Угол поворота ∆φ = ∆ φ0 + ωt, ∆φ0 — начальное значение угла. Угол поворота величина положительная (аналог пути).
Периодом вращения называется промежуток времени T, в течении которого тело, равномерно вращаясь с угловой скоростью ω, совершает один оборот вокруг оси вращения. При этом тело поворачивается на угол 2π.
 .
.
Частота вращения показывает число оборотов, совершаемых телом за единицу времени при равномерном вращении с угловой скоростью ω:
 .
.
Равнопеременное вращение по окружности
Ускорение: угловое β = const, тангенциальное аτ = βR=const, нормальное аn = ω 2R ≠ const, полное 
Скорость: угловая ω = ω0 ( βt), линейная 
Угловое перемещение  .
.
Все сказанное ранее относительно знаков в кинематических уравнениях для прямолинейного равнопеременного движения остается верным и для кинематических уравнений вращательного движения: плюс в формулах относится к равноускоренному вращению, минус — к равнозамедленному.
Неравномерное вращение
Ускорение: аτ = аτ (t), аn = а n(t), β ≠ const,
Скорость:
Угловая ω = dφ/dt, линейная  .
.
КИНЕМАТИКА • Большая российская энциклопедия
КИНЕМА́ТИКА (от греч. ϰίνημα, род. п. ϰινήματος – движение), раздел механики, в котором описываются геометрич. характеристики движения механического – движения материальных точек и их систем, абсолютно твёрдых тел и т. д. Соответственно выделяют разделы К.: К. материальной точки, К. системы точек, К. твёрдого тела и т. д.
Осн. понятия К. (мгновенная скорость и мгновенное ускорение материальной точки) были введены Г. Галилеем в фундам. труде «Беседы и математич. доказательства, касающиеся двух новых отраслей науки, относящихся к механике и местному движению» (1638). Галилей получил строгие математич. законы К. на основе обобщения эксперим. данных, установил принцип относительности (см. Галилея принцип относительности). Х. Гюйгенс (1672) конкретизировал принципы и понятия К., введённые Галилеем. Работы Гюйгенса послужили базой для создания механики И. Ньютона (1687). В 1765 Л. Эйлер заложил основы К. твёрдого тела. В нач. 19 в. Г. Кориолис дал окончательную формулировку теории относительного движения. С сер. 19 в. К. начала активно использоваться для описания преобразования движения в механизмах и выделилась в самостоятельный раздел теоретич. механики.
Кинематика материальной точки
Движение материальной точки описывается по отношению к выбранной системе координат $Oxyz$. Кинематич. характеристиками движения точки служат векторы $\boldsymbol r$, $\boldsymbol v$ и $\boldsymbol w$, задающие в момент времени $t$ соответственно мгновенное положение, мгновенную скорость и мгновенное ускорение точки: $\boldsymbol r(t)=\{x(t),y(t),z(t)\}, \boldsymbol v(t)=d \boldsymbol r/dt=\{dx/dt, dy/dt, dz/dt \}$ и $\boldsymbol w(t)=d^2 \boldsymbol r/dt^2=\{d^2x/dt^2, d^2y/dt^2, d^2z/dt^2\}$. Кроме прямоугольных координат ($x,y,z$) в К. для описания движения точки используются также и криволинейные координаты (цилиндрические, полярные, сферические и т. п.).
Геометрич. место последовательных положений точки в процессе её движения называется траекторией. Соотношение $\boldsymbol r=\boldsymbol r(t)$ представляет собой параметрич. форму уравнения траектории как некоторой кривой в пространстве. Закон движения материальной точки может быть также определён формой траектории, её положением в пространстве, положением начальной точки $O$ на траектории и положительным направлением отсчёта дуговой координаты $s$ от начальной точки до её текущего значения.
Уравнение $s=s(t)$ определяет закон движения точки по траектории. Скорость материальной точки равна $\boldsymbol v=\boldsymbol \tau ds/dt$, где $\boldsymbol \tau$ – единичный вектор касательной к траектории в некоторой точке $M$. В дифференциальной геометрии вводятся три взаимно ортогональных единичных вектора: $\boldsymbol \tau$, $\boldsymbol n$ (вектор главной нормали к кривой) и вектор бинормали $\boldsymbol \beta=[\boldsymbol \tau, \boldsymbol n]$. Векторы $\boldsymbol \tau$ и $\boldsymbol n$ определяют соприкасающуюся плоскость в точке $M$ траектории.
Ускорение точки выражается формулой $\boldsymbol w(t)=d \boldsymbol v/dt=d^2 \boldsymbol r/dt^2=\boldsymbol \tau dv/dt+\boldsymbol n v^2/R$. Здесь полное ускорение точки представлено в виде суммы двух взаимно ортогональных векторов – касательного ускорения $\boldsymbol w_\tau$ (первое слагаемое) и центростремительного ускорения $\boldsymbol w_n$ (второе слагаемое), направленного вдоль главной нормали к траектории в сторону центра кривизны, отстоящего от точки $M$ на расстояние $R$. Проекция вектора ускорения на бинормаль всегда равна нулю.
Для траектории, представляющей собой прямую, в любой её точке расстояние $R= \infty$; такое движение материальной точки называется прямолинейным. Если величина скорости материальной точки остаётся постоянной $[v(t)=\text {const} \neq0]$, то такое её движение называется равномерным. Если касательное ускорение точки постоянно $(dv(dt)=\text {const} \neq0)$, то такое движение называется равноускоренным.
Путь, пройденный точкой в её движении вдоль траектории, определяется как интеграл по времени от модуля скорости. Величина пути монотонно возрастает, в то время как координата точки может то возрастать, то уменьшаться. Напр., при незатухающих колебаниях математич. маятника путь колеблющейся материальной точки непрерывно возрастает, а её дуговая координата принимает значения, ограниченные амплитудой $A$ колебаний (от $-A$ до $+A$).
Кинематика относительного движения
Система координат $Oxyz$, относительно которой рассматривается движение материальной точки $M$, может быть связана с некоторым телом, которое само движется относительно неподвижной системы $Ox_1y_1z_1$. В этом случае скорость и ускорение точки $M$ относительно системы $Oxyz$ называют относительными и обозначают соответственно $\boldsymbol v_{отн}$ и $\boldsymbol w_{отн}$. Движение той же материальной точки относительно системы $Ox_1y_1z_1$ называют абсолютным, его скорость и ускорение обозначают $\boldsymbol v_{абс}$ и $\boldsymbol w_{абс}$. При отсутствии относительного движения $(v_{отн}=0)$ точка $M$ переносится движущимся телом, с которым связана система $Oxyz$, и её скорость совпадает со скоростью $\boldsymbol v_{пер}$ той точки $N$ тела, в которой в данный момент находится точка $M$: $\boldsymbol r_N(t)=\boldsymbol r_M(t)$, но не тождественно (т. к. речь идёт о независимых точках). Вектор $\boldsymbol v_{пер}=d \boldsymbol r_N/dt$ называется переносной скоростью или скоростью переносного движения. Формула $\boldsymbol v_{абс}=\boldsymbol v_{отн}+ \boldsymbol v_{пер}$ выражает т. н. теорему сложения скоростей. Ускорение точки $N$ называют переносным и обозначают $\boldsymbol w_{пер}$. Сложение ускорений описывается теоремой Кориолиса: $\boldsymbol w_{абс}=\boldsymbol w_{отн}+ \boldsymbol w_{пер}+ \boldsymbol w_{Кор}$. Здесь дополнительное слагаемое $\boldsymbol w_{Кор}$ (Кориолиса ускорение) возникает в том случае, если система $Oxyz$ вращается относительно системы $O_1x_1y_1z_1$: $\boldsymbol w_{Кор}=2[\boldsymbol \omega, \boldsymbol v_{отн}]$, где $\boldsymbol \omega$ – вектор угловой скорости подвижной системы координат.
Кинематика систем связанных точек и тел
Машины, механизмы и др. объекты техники часто моделируют системой связанных материальных точек и тел (см. Связи механические). В системе со связями положения и скорости разл. точек системы не могут быть заданы произвольно. Первой задачей К. таких систем является формализация связей, которые записывают в виде уравнений связей – полного набора независимых соотношений между координатами точек системы. Вторая задача К. систем связанных точек и тел сводится к сокращению числа величин, необходимых для полного описания движения объекта. Для этого из общего числа величин исключают те, которые выражаются через другие величины при помощи уравнений связей. Последняя задача нередко решается с помощью подходящего выбора обобщённых координат.
Обе задачи К. допускают неоднозначные решения. Из всех решений выбираются такие, которые позволяют придать системе дифференциальных уравнений движения объекта наиболее удобную форму. В теории машин и механизмов, кроме того, необходимо связать входные и выходные характеристики движения (cм. Кинематика механизмов).
Кинематика твёрдого тела
В этом разделе К. рассматриваются разл. типы движений абсолютно твёрдого тела. Под абсолютно твёрдым телом понимают систему материальных точек, взаимное положение которых не изменяется. Осн. задача К. твёрдого тела – определение скоростей и ускорений всех его точек.
С геометрич. точки зрения движение абсолютно твёрдого тела относительно неподвижной системы координат $O_1x_1y_1z_1$ с началом в точке $O_1$ эквивалентно движению связанной с этим телом системы $Oxyz$ с началом в произвольно выбранной точке $O$ тела. Положение тела однозначно определяется положением трёх его точек, не лежащих на одной прямой. Положение трёх точек в системе $O_1x_1y_1z_1$ задаётся с помощью девяти координат, на которые наложены три условия постоянства взаимных расстояний между точками. Это сокращает число независимых величин (определяющих макс. число степеней свободы тела) до шести. Дополнит. ограничения на движение тела уменьшают число степеней свободы и определяют тип движения тела. Так, при фиксированных координатах указанных точек тело находится в состоянии покоя относительно системы $O_1x_1y_1z_1$.
Поступательное движение тела. Движение твёрдого тела называют поступательным, если каждый прямолинейный отрезок, состоящий из точек тела, перемещается параллельно самому себе. В этом случае оси системы координат, связанной с телом, можно расположить сонаправленно осям неподвижной системы. Скорость и ускорение любой точки тела равны соответственно скорости и ускорению точки $O$ (начала системы координат, связанной с телом). Точка $O$ может двигаться как по прямой, так и по плоской или пространственной кривой. Напр., вагон поезда на прямом участке пути движется поступательно и прямолинейно. Кабина колеса обозрения тоже движется поступательно, но её точки описывают окружности.
Тело, движущееся поступательно, имеет три степени свободы (столько же, сколько у материальной точки), для описания его движения достаточно задать три независимые координаты.
Вращение тела вокруг оси. При вращательном движении тела связанная с ним система координат изменяет свою ориентацию относительно неподвижной системы, т. е. совершает поворот. Наиболее простой случай вращательного движения – вращения тела вокруг неподвижной оси. Для описания такого движения три точки тела выбирают следующим образом: две точки – на оси вращения, а третью – вне этой оси. При движении тела две первые точки не изменяют своего положения относительно неподвижной системы координат, а третья точка описывает окружность с центром на оси вращения. Т. о., тело имеет одну степень свободы, его положение определяется одной координатой – углом $\phi$ между текущим положением плоскости трёх выбранных точек и плоскостью $Ox_1z$, определяющей положение неподвижной системы координат. Уравнение $\phi=\phi(t)$ задаёт закон вращения тела вокруг неподвижной оси. Кинематич. характеристиками этого движения служат угловая скорость $\omega(t)=d \phi/dt$ и угловое ускорение $\varepsilon=d\omega/dt=d^2 \phi/dt^2$.
Скорость $\boldsymbol v_N$ произвольной точки $N$ тела, не принадлежащей оси вращения, направлена по касательной к соответствующей окружности и равна $v_N=\omega R_N$, где $R_N$ – расстояние от точки $N$ до оси вращения. Вектор ускорения $\boldsymbol w_N$ точки может быть представлен в виде суммы векторов касательного ускорения $\boldsymbol w_\tau$ и центростремительного ускорения $\boldsymbol w_n$, причём $w_\tau=\varepsilon R_N=dv_N/dt$, $w_n=\omega^2R_N=v^2_N/R_N$.
Данный раздел К. твёрдого тела используют для описания разл. механизмов, содержащих вращающиеся элементы (роторы, турбины, колёса).
При более сложных вращательных движениях учитывается прецессия оси вращения. В этом случае вращательное движение тела может быть представлено суперпозицией двух простых вращений: тело вращается вокруг своей оси $Oz$, которая в свою очередь вращается вокруг неподвижной оси $Oz_1$. Тогда ориентация тела в пространстве определяется тремя координатами – т. н. Эйлера углами [$\psi(t)$ – угол прецессии, $\phi(t)$ – угол собственного вращения, $\theta$ – постоянный угол нутации].
Вращение тела вокруг неподвижной точки. При произвольном вращении тела вокруг неподвижной точки $O$ все три угла Эйлера зависят от времени, причём движение тела нельзя свести к двум простым вращениям. Как показал Л. Эйлер, для описания данного движения можно найти такой вектор $\omega$ (называемый мгновенной угловой скоростью тела), что скорость $\boldsymbol v_N$ точки $N$ тела определяется формулой $\boldsymbol v_N=\boldsymbol [\omega, \boldsymbol r_N]$. Те точки тела, для которых векторы $\boldsymbol r_N$ и $\boldsymbol \omega$ коллинеарны, образуют мгновенную ось вращения тела (мгновенная скорость этих точек равна нулю). Вектор $\boldsymbol \omega=\{\omega_x, \omega_y, \omega_z \}$ представляет собой геометрич. сумму трёх векторов: $\boldsymbol e_1d\psi/dt$ – угловая скорость прецессии (орт $\boldsymbol e_1$ неизменен в неподвижной системе координат), $\boldsymbol e_2d\phi/dt$ – угловая скорость собственного вращения (орт $\boldsymbol e_2$ неизменен относительно тела), $\boldsymbol e_3d\theta/dt$ – угловая скорость нутации (орт $\boldsymbol e_3$ вращается вокруг $\boldsymbol e_1$). Движение твёрдого тела относительно неподвижной точки описывается следующими кинематическими Эйлера уравнениями: $$\omega_x=(d\theta/dt)\cos \phi — (d \psi /dt)\sin \theta \sin \phi;\\ \omega_y=(d\theta/dt)\sin \phi — (d \psi /dt)\sin \theta \cos \phi;\\ \omega_z=d\phi/dt+(d\psi/dt)\cos \theta.$$
Кроме углов Эйлера для описания вращательного движения тела могут быть использованы и др. параметры: углы Крылова, параметры Родрига – Гамильтона и т. п. Ускорение $\boldsymbol w_N$ точки $N$ тела вычисляется по формуле Ривальса: $\boldsymbol w_N=[d\boldsymbol\omega/dt, \boldsymbol r_N]+[\boldsymbol\omega,[\boldsymbol\omega,\boldsymbol r_N]]$.
Произвольное движение тела. Произвольное движение твёрдого тела можно разложить на две составляющие: поступательное движение со скоростью $\boldsymbol v_O$ некоторой точки $O$ тела и вращение вокруг этой точки с угловой скоростью $\boldsymbol \omega$. Замена точки $O$ на др. точку, напр. точку $N$, вносит изменение в описание этого же движения. Вообще говоря, изменяется направление и величина скорости $\boldsymbol v_N$ поступательного движения, но не изменяется угловая скорость $\boldsymbol \omega$ вращения, совершаемого теперь вокруг точки $N$. Если $\omega \neq 0$ и $(\boldsymbol v_O, \boldsymbol \omega) \neq 0$, в теле существует множество точек, для которых векторы $\boldsymbol v$ и $\boldsymbol \omega$ коллинеарны. Эти точки образуют мгновенную винтовую ось движения тела (см. Винтовое движение).
Плоскопараллельное движение тела. Тело совершает плоскопараллельное движение, если скорости всех его точек в любой момент времени параллельны некоторой неподвижной плоскости. Спроектировав тело на эту плоскость, получим плоскую фигуру, движение которой по плоскости эквивалентно движению тела. Если в этом движении $w(t) \neq0$, то вектор $\boldsymbol \omega$ ортогонален указанной плоскости, $(\boldsymbol v_O, \boldsymbol \omega) \neq 0$ и ось мгновенного винта пересекает фигуру в мгновенном центре вращения. Если $\omega=0$, но $v_O \neq 0$, то тело находится в состоянии мгновенно поступательного движения.
К. сплошных сред (деформируемого тела, несжимаемой и сжимаемой жидкости) требует более сложных процедур описания: рассматривается общая теория деформаций, определяются т. н. уравнения неразрывности и т. д. (см. Механика сплошной среды, Механика жидкости и газа).
Кинематика точки и твердого тела. Базовый уровень. Видеоурок. Физика 10 Класс
Грузовик едет со средней скоростью 70 км/час. Сколько времени он потратит на дорогу из одного города в другой, если расстояние между городами 350 км?
Вы решите эту задачу в одно действие, получится 5 часов. Но для водителя может быть важнее ответ на другой вопрос: сколько времени займёт обгон другого такого же грузовика, который движется со скоростью 60 км/ч, а длина каждого грузовика – 7 м? Попробуйте решить задачу самостоятельно, ответ получится около 5 с.
Задачи простые, но вот что интересно: в первой нам было вообще всё равно, совершал ли обгоны грузовик, важно было только общее время движения. Мы рассмотрели его как материальную точку, которая движется с постоянной скоростью. А вторую задачу мы бы не решили, не зная длин грузовиков, здесь модель материальной точки уже неприменима.
У нас есть в запасе различные модели – это инструменты. Которые мы можем с той или иной степенью точности использовать для решения различных практических задач. Если эта точность нас не устраивает, то мы используем другую модель или разрабатываем новую, например, уточняя текущую.
Так, для описания движения в кузове пустого баллона или вибрации двигателя грузовика описанные выше модели не подойдут, понадобятся новые. При этом рассмотренные модели не имеют отношения к грузовику – они могут применяться к автобусу, поезду, бильярдному шару или любому другому объекту. Задачи могут быть самыми разными, но то немногое, что для нас в них является самым важным, может быть описано одной и той же моделью.
Обратите внимание, что в рассмотренных задачах про грузовик нас интересовали только время, скорость и расстояние, которое он проехал. Нам было не важно, как работал двигатель, сколько бензина понадобилось, почему вообще грузовик двигался и тяжелый ли вёз груз.
Решением таких задач занимается кинематика — раздел физики, посвященный моделям движения, которые не учитывают причины движения, а только описывают его. О задачах кинематики и моделях, которые используются для их решения, мы сегодня и будем говорить.
Рассмотрим такую задачу: с горки известной высоты и известного наклона соскальзывает шайба и скатывается шар. На одинаковом ли расстоянии от горки они остановятся?

Рис. 1. Задача на скатывание тел с наклонной поверхности
Может оказаться, что не на одинаковом, даже при одинаковом трении с поверхностью. Если использовать модель материальной точки и для шайбы, и для шара, то этот результат необъясним.

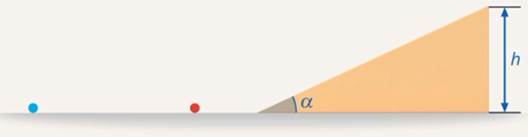
Рис. 2. В модели материальной точки тела неразличимы
Действительно, потенциальная энергия перешла в кинетическую – можем вычислить скорость тела внизу горки, а по ней рассчитать расстояние, на котором они оба остановятся. Чтобы объяснить разные расстояния, нам придётся учесть вращение шара – тогда потенциальная энергия будет расходоваться не только на увеличение кинетической энергии, но и на увеличение энергии вращения шара. В данном случае для шара мы можем применить модель твёрдого тела, в которой различаются поступательное и вращательное движения.
Поступательное и вращательное движение
Поступательное движение – это такое движение, при котором все точки тела движутся одинаково: с одинаковой скоростью, совершая одинаковое перемещение.
Рис. 3. Поступательное движение
А как еще может быть? Взмахните рукой и проследите: понятно, что ладонь и плечо двигались по-разному. Посмотрите на колесо обозрения: точки вблизи оси почти не движутся, а кабинки движутся с другой скоростью и по другим траекториям.
Рис. 4. Вращательное движение
Посмотрите на прямолинейно движущийся автомобиль: если не учитывать вращение колес и движение частей мотора, все точки автомобиля движутся одинаково, движение автомобиля считаем поступательным. Тогда нет смысла описывать движение каждой точки, можно описать движение одной. Автомобиль считаем материальной точкой. Обратите внимание, что при поступательном движении линия, соединяющая любые две точки тела при движении, остается параллельной сама себе.
Второй вид движения по этой классификации – вращательное движение. При вращательном движении все точки тела движутся по окружности вокруг какой-то одной оси. Эта ось может пересекать тело, как в случае с колесом обозрения, а может не пересекать, как в случае с автомобилем на повороте (рисунок).
Но не любое движение можно отнести к какому-то одному из двух видов. Как описать движение педалей велосипеда относительно земли – это какой-то третий тип? Наша модель удобна тем, что можно рассматривать движение как комбинацию поступательного и вращательного движений: относительно своей оси педали вращаются, а ось вместе со всем велосипедом движется поступательно относительно Земли.
Возьмем другой пример: фигуристка вращается на месте, и, когда она прижимает руки к груди, она начинает вращаться значительно быстрее.

Рис. 5. Вращение фигуристки
Момент инерции
Как узнать, варёное перед нами яйцо или сырое? Можно это определить по вращению. Раскрутить яйцо на столе: варёное будет долго вращаться, а сырое остановится быстрее. Как это объяснить? Для описания вращательного движения ввели понятие момента инерции. Можно провести аналогию с массой.
Масса – это мера инертности при поступательном движении: чтобы разогнать или остановить более тяжелое тело, потребуется бóльшая сила, чем для более легкого тела. Для момента инерции справедливо то же, только описывается вращательное движение и угловая скорость. Кинетическая энергия вращательного движения определяется моментом инерции и угловой скоростью.
Возвращаемся к вращению яйца. У сырого яйца во вращении участвует по сути только скорлупа, её момент инерции меньше, чем момент инерции вареного яйца – сплошного твердого тела. Поэтому и энергия вращения, а значит и время вращения меньше. Мы не учли, что жидкость внутри сырого яйца вязкая и тоже как-то движется, но мы и не делаем точных расчетов, а для сравнения такого предположения достаточно.
Рассмотрим в рамках нашей модели вращение фигуристки. Момент инерции зависит от распределения массы – чем она ближе к оси вращения, тем меньше момент инерции. Прижимая руки к груди, фигуристка меняет распределение массы, и момент инерции уменьшается. И из закона сохранения энергии понятно: если уменьшился момент инерции, увеличилась скорость.
Мы иногда и не замечаем, как используются модели: фигуристка умеет управлять моментом инерции, даже не зная о нём. Задача физики – создать модель, чтобы можно было управлять осознанно. Тогда можно посчитать, как управлять, поставить задачу компьютеру, чтобы он всё рассчитал.
В целом ясно, что энергия одного вида движения превращается в энергию другого, и это нельзя описать, считая фигуристку материальной точкой. Как материальная точка она вообще неподвижна.
Как это вращение описать? Удобно использовать то, что уже хорошо разобрали. Обычно, чтобы описать движение тела, достаточно описать движение нескольких его точек, а для описания движения у нас есть готовые инструменты. Например, для катящегося с горки шара можно рассматривать движение одной из точек поверхности относительно центра шара, и движение центра шара относительно горки.
Итак, несколько моделей в нашем наборе инструментов уже есть: это равномерное и равноускоренное прямолинейное движение материальной точки и равномерное движение по окружности. И некоторые задачи мы уже умеем решать.
На уроках математики мы успели овладеть новыми математическими инструментами, такими, как вектор и система координат, с помощью которых мы можем создать более удобные физические модели и решать с их помощью больше задач. Давайте упорядочим информацию о тех инструментах кинематики, которые у нас уже есть, и заодно научимся пользоваться новыми.

Рис. 6. Определение материальной точки
Здесь мы под точкой понимаем то же, что и в геометрии: дать определение точке нельзя, это базовое понятие, но мы можем сформулировать, что мы с её помощью будем описывать – объект, на размеры которого мы при решении данной задачи можем не обращать внимания, но на положение которого мы можем указать. Только в отличие от точки в геометрии, в физике мы ей приписываем еще и массу.
Обратите внимание, что само по себе выражение «материальная точка» — оксюморон (как, например, «живой труп»). Действительно, сама по себе точка не может быть материальной, у неё нет длины, ширины, мы, в принципе, не можем на неё указать. Но в этом и заключается смысл модели – не существовать в реальности, а приближать с достаточной точностью множество реальных ситуаций и помогать их описывать.
Мы говорим о движении, то есть об изменении положения точки со временем. Но изменение положения может быть только относительно других объектов. В жизни, чтобы обозначить положение чего-либо, мы говорим: возле окна, в десяти километрах от города. Можем указать адрес: улица Пушкина, и номер дома и квартиры. Можем указать место в театре: ряд 7, место 15. В зависимости от задачи, которую мы решаем, мы выбираем точку отсчёта и систему координат.
Воспользуемся уже готовым математическим инструментом – декартовой (прямоугольной) системой координат. Но система координат позволяет задать положение точки относительно какого-то объекта, то есть нужно еще задать этот объект – тело отсчета.
Добавим к системе координат и телу отсчета часы, чтобы рассматривать процессы с течением времени, и получим систему отсчета. Раздел физики, механика, занимается решением следующей задачи, которая так и называется:
Основная задача механики – точно определять положение тела в пространстве в любой момент времени.
В этой стандартной формулировке все слова следует пояснить.
- Абсолютно точно мы в реальном мире ничего не определяем. Точность всегда конечна: иногда нас устраивает определить положение чего-то с точностью до метра, иногда – до миллиметра, а ведь можно и до десятой, и до тысячной доли миллиметра – на чём-то всё равно остановимся. И, как мы уже много раз говорили, точность определяется конкретной задачей, которую мы сейчас решаем.
- Для тела можно использовать разные модели, мы договорились изучать модель материальной точки.
- Нас не интересует любой момент времени, нас интересует конкретный период в рамках решаемой задачи. Если автомобиль едет с постоянной скоростью 70 км/ч, то через 5 часов он будет в 350 километрах от начала пути. В решение мы действительно можем подставить любое время и получить ответ: за 10 часов проедет 700 км, а за месяц обогнёт земной шар. Только эти результаты лишены смысла, автомобиль не будет ехать дальше пункта назначения, и уж тем более плыть во время кругосветного путешествия по океану.
На математическом языке основная задача механики звучит так: определить положение точки в п
Кинематика (физика) — это… Что такое Кинематика (физика)?
У этого термина существуют и другие значения, см. Кинематика.Кинема́тика (греч. κινειν — двигаться) в физике — раздел механики, изучающий математическое описание (средствами геометрии, алгебры, математического анализа…) движения идеализированных тел (материальная точка, абсолютно твердое тело, идеальная жидкость), без рассмотрения причин движения (массы, сил и т. д.). Исходные понятия кинематики — пространство и время. Например, если тело движется по окружности, то кинематика предсказывает необходимость существования центростремительного ускорения без уточнения того, какую природу имеет сила, его порождающая. Причинами возникновения механического движения занимается другой раздел механики — динамика.
Различают классическую кинематику, в которой пространственные (длины отрезков) и временные (промежутки времени) характеристики движения считаются абсолютными, то есть не зависящими от выбора системы отсчёта, и релятивистскую. В последней длины отрезков и промежутки времени между двумя событиями могут изменяться при переходе от одной системы отсчёта к другой. Относительной становится также одновременность. В релятивистской механике вместо отдельных понятий пространство и время вводится понятие пространства-времени, в котором инвариантным относительно преобразований Лоренца является величина, называемая интервалом.
История кинематики
Долгое время понятия о кинематике были основаны на работах Аристотеля, в которых утверждалось, что скорость падения пропорциональна весу тела, а движение в отсутствие сил невозможно. Только в конце XVI века этим вопросом подробно занялся Галилео Галилей. Изучая свободное падение (знаменитые опыты на Пизанской башне) и инерцию тел, он доказал неправильность идей Аристотеля. Итоги своей работы по данной теме он изложил в книге «Беседы и математические доказательства, касающиеся двух новых отраслей науки, относящихся к механике и местному движению»[1].
Рождением современной кинематики можно считать выступление Пьера Вариньона перед Французской Академией наук 20 января 1700 года. Тогда впервые были даны понятия скорости и ускорения в дифференциальном виде.
В XVIII веке Ампер первый использовал вариационное исчисление в кинематике.
После создания СТО, показывающей, что время и пространство не абсолютны и скорость имеет принципиальное ограничение, кинематика вошла в новый этап развития в рамках релятивистской механики (см. Релятивистская кинематика).
Основные понятия кинематики
Задачи кинематики
Главной задачей кинематики является математическое (уравнениями, графиками, таблицами и т. п.) определение положения и характеристик движения точек или тел во времени. Любое движение рассматривается в определённой системе отсчёта. Также кинематика занимается изучением составных движений (движений в двух взаимно перемещающихся системах отсчёта).
Положение точки (или тела) относительно заданной системы отсчёта определяется некоторым количеством взаимно независимых функций координат:
- ,
где определяется количеством степеней свободы. Так как точка не может быть в нескольких местах одновременно, все функции должны быть однозначными. Также в классической механике выдвигается требование их дифференцируемости на промежутках. Производные этих функций определяют скорость тела[2].
Скорость движения определяется как производная координат по времени:
- ,
где — единичные векторы, направленные вдоль соответствующих координат.
Ускорение определяется как производная скорости по времени:
Следовательно, характер движения можно определить, зная зависимость скорости и ускорения от времени. А если кроме этого известны ещё и значения скорости/координат в определённый момент времени, то движение полностью задано.
Деление кинематики по типам объекта исследования
В зависимости от свойств изучаемого объекта, кинематика делится на кинематику точки, кинематику твёрдого тела, кинематику деформируемого тела, кинематику газа, кинематику жидкости и т. д.
Кинематика точки
Основная статья: Кинематика точки
Кинематика точки изучает движение материальных точек — тел, размерами которых можно пренебречь по сравнению с характерными размерами изучаемого явления. Поэтому в кинематике точки скорость, ускорение, координаты всех точек тела считаются равными.
Частные случаи движения в кинематике точки:
- Если ускорение равно нулю, движение прямолинейное (траектория представляет собой прямую) и равномерное (скорость постоянна).
- ,
где — длина пути траектории за промежуток времени от до , — проекции на соответствующие оси координат.
- Если ускорение постоянно и лежит в одной прямой со скоростью, движение прямолинейное, равнопеременное (равноускоренное, если ускорение и скорость направлены в одном направлении; равнозамедленное — если в разные).
- ,
где — длина пути траектории за промежуток времени от до , — проекции на соответствующие оси координат, — проекции на соответствующие оси координат.
- Если ускорение постоянно и перпендикулярно скорости, движение происходит по окружности — вращательное движение.
- ,
где — радиус окружности, по которой движется тело.
Если выбрать систему декартовых координат xyz так, чтобы центр координат был в центре окружности, по которой движется точка, оси y и x лежали в плоскости этой окружности, так чтобы движение осуществлялось против часовой стрелки, то значения координат можно вычислить по формулам:
Для перехода в другие системы координат используются преобразования Галилея для скоростей намного меньших скорости света, и преобразования Лоренца для скоростей, сравнимых со скоростью света.
- Если ускорение постоянно и не лежит на одной прямой с начальной скоростью, движение параболическое.
Если выбрать систему декартовых координат xyz так, чтобы ускорение и начальная скорость лежали в плоскости xy и ускорение было сонаправленно с осью y, то значения координат можно вычислить по формулам:
- ,
где и — проекции на соответствующие оси.
Для перехода в другие системы координат используются преобразования Галилея для скоростей намного меньших скорости света, и преобразования Лоренца для скоростей, сравнимых со скоростью света.
- Если тело выполняет разные движения в разных направлениях, то эти движения могут рассчитываться отдельно и складываться по принципу суперпозиции. Например, если в одной плоскости тело совершает вращательное движение, а по оси, перпендикулярной этой плоскости — равномерное поступательное, то вид движения — винтовая линия с постоянным шагом.
- В общем виде скорость, ускорение и координаты вычисляются по общим формулам (см. задачи кинематики), путь вычисляется по формуле:
Кинематика твёрдого тела
Кинематика твёрдого тела изучает движение абсолютно твёрдых тел (тел, расстояние между двумя любыми точками которого не может изменяться).
Так как любое тело ненулевого объёма имеет бесконечное число точек, и соответственно бесконечное число фиксированных связей между ними, тело имеет 6 степеней свободы и его положение в пространстве определяется шестью координатами (если нет дополнительных условий).
Связь скорости двух точек твердого тела выражается через формулу Эйлера:
- ,
где — вектор угловой скорости тела.
Кинематика деформируемого тела, Кинематика жидкости
Основные статьи: Кинематика деформируемого тела, Кинематика жидкости
Кинематика деформируемого тела и кинематика жидкости относятся к кинематике непрерывной среды.
Кинематика газа
Основная статья: Кинематика газа
Кинематика газа изучает деление газа на скопления при движении и описывает движение этих скоплений. В рамках кинематики газа описываются не только основные параметры движения, но и типы движения газа.
Примечания
Литература
- Алешкевич В. А., Деденко Л. Г., Караваев В. А. Механика твердого тела. Лекции. — М.: Изд-во Физического факультета МГУ, 1997.
- Матвеев. А. Н. Механика и теория относительности. — М.: Высшая школа, 1986. (3-е изд. М.: ОНИКС 21 век: Мир и Образование, 2003. — 432с.)
- Павленко Ю. Г. Лекции по теоретической механике. — М.: ФИЗМАТЛИТ, 2002. — 392 с.
- Сивухин Д. В. Общий курс физики. В 5 т. Том I. Механика. 4-е изд. — М.: ФИЗМАТЛИТ; Изд-во МФТИ, 2005. — 560с.
- Стрелков С. П. Механика. — М.: Наука, 1975.
- Яворский Б. М., Детлаф А. А. Справочник по физике для инженеров и студентов вузов (4-е изд.). — М.: Наука, 1968.
Кинематика (физика) — это… Что такое Кинематика (физика)?
У этого термина существуют и другие значения, см. Кинематика.Кинема́тика (греч. κινειν — двигаться) в физике — раздел механики, изучающий математическое описание (средствами геометрии, алгебры, математического анализа…) движения идеализированных тел (материальная точка, абсолютно твердое тело, идеальная жидкость), без рассмотрения причин движения (массы, сил и т. д.). Исходные понятия кинематики — пространство и время. Например, если тело движется по окружности, то кинематика предсказывает необходимость существования центростремительного ускорения без уточнения того, какую природу имеет сила, его порождающая. Причинами возникновения механического движения занимается другой раздел механики — динамика.
Различают классическую кинематику, в которой пространственные (длины отрезков) и временные (промежутки времени) характеристики движения считаются абсолютными, то есть не зависящими от выбора системы отсчёта, и релятивистскую. В последней длины отрезков и промежутки времени между двумя событиями могут изменяться при переходе от одной системы отсчёта к другой. Относительной становится также одновременность. В релятивистской механике вместо отдельных понятий пространство и время вводится понятие пространства-времени, в котором инвариантным относительно преобразований Лоренца является величина, называемая интервалом.
История кинематики
Долгое время понятия о кинематике были основаны на работах Аристотеля, в которых утверждалось, что скорость падения пропорциональна весу тела, а движение в отсутствие сил невозможно. Только в конце XVI века этим вопросом подробно занялся Галилео Галилей. Изучая свободное падение (знаменитые опыты на Пизанской башне) и инерцию тел, он доказал неправильность идей Аристотеля. Итоги своей работы по данной теме он изложил в книге «Беседы и математические доказательства, касающиеся двух новых отраслей науки, относящихся к механике и местному движению»[1].
Рождением современной кинематики можно считать выступление Пьера Вариньона перед Французской Академией наук 20 января 1700 года. Тогда впервые были даны понятия скорости и ускорения в дифференциальном виде.
В XVIII веке Ампер первый использовал вариационное исчисление в кинематике.
После создания СТО, показывающей, что время и пространство не абсолютны и скорость имеет принципиальное ограничение, кинематика вошла в новый этап развития в рамках релятивистской механики (см. Релятивистская кинематика).
Основные понятия кинематики
Задачи кинематики
Главной задачей кинематики является математическое (уравнениями, графиками, таблицами и т. п.) определение положения и характеристик движения точек или тел во времени. Любое движение рассматривается в определённой системе отсчёта. Также кинематика занимается изучением составных движений (движений в двух взаимно перемещающихся системах отсчёта).
Положение точки (или тела) относительно заданной системы отсчёта определяется некоторым количеством взаимно независимых функций координат:
- ,
где определяется количеством степеней свободы. Так как точка не может быть в нескольких местах одновременно, все функции должны быть однозначными. Также в классической механике выдвигается требование их дифференцируемости на промежутках. Производные этих функций определяют скорость тела[2].
Скорость движения определяется как производная координат по времени:
- ,
где — единичные векторы, направленные вдоль соответствующих координат.
Ускорение определяется как производная скорости по времени:
Следовательно, характер движения можно определить, зная зависимость скорости и ускорения от времени. А если кроме этого известны ещё и значения скорости/координат в определённый момент времени, то движение полностью задано.
Деление кинематики по типам объекта исследования
В зависимости от свойств изучаемого объекта, кинематика делится на кинематику точки, кинематику твёрдого тела, кинематику деформируемого тела, кинематику газа, кинематику жидкости и т. д.
Кинематика точки
Основная статья: Кинематика точки
Кинематика точки изучает движение материальных точек — тел, размерами которых можно пренебречь по сравнению с характерными размерами изучаемого явления. Поэтому в кинематике точки скорость, ускорение, координаты всех точек тела считаются равными.
Частные случаи движения в кинематике точки:
- Если ускорение равно нулю, движение прямолинейное (траектория представляет собой прямую) и равномерное (скорость постоянна).
- ,
где — длина пути траектории за промежуток времени от до , — проекции на соответствующие оси координат.
- Если ускорение постоянно и лежит в одной прямой со скоростью, движение прямолинейное, равнопеременное (равноускоренное, если ускорение и скорость направлены в одном направлении; равнозамедленное — если в разные).
- ,
где — длина пути траектории за промежуток времени от до , — проекции на соответствующие оси координат, — проекции на соответствующие оси координат.
- Если ускорение постоянно и перпендикулярно скорости, движение происходит по окружности — вращательное движение.
- ,
где — радиус окружности, по которой движется тело.
Если выбрать систему декартовых координат xyz так, чтобы центр координат был в центре окружности, по которой движется точка, оси y и x лежали в плоскости этой окружности, так чтобы движение осуществлялось против часовой стрелки, то значения координат можно вычислить по формулам:
Для перехода в другие системы координат используются преобразования Галилея для скоростей намного меньших скорости света, и преобразования Лоренца для скоростей, сравнимых со скоростью света.
- Если ускорение постоянно и не лежит на одной прямой с начальной скоростью, движение параболическое.
Если выбрать систему декартовых координат xyz так, чтобы ускорение и начальная скорость лежали в плоскости xy и ускорение было сонаправленно с осью y, то значения координат можно вычислить по формулам:
- ,
где и — проекции на соответствующие оси.
Для перехода в другие системы координат используются преобразования Галилея для скоростей намного меньших скорости света, и преобразования Лоренца для скоростей, сравнимых со скоростью света.
- Если тело выполняет разные движения в разных направлениях, то эти движения могут рассчитываться отдельно и складываться по принципу суперпозиции. Например, если в одной плоскости тело совершает вращательное движение, а по оси, перпендикулярной этой плоскости — равномерное поступательное, то вид движения — винтовая линия с постоянным шагом.
- В общем виде скорость, ускорение и координаты вычисляются по общим формулам (см. задачи кинематики), путь вычисляется по формуле:
Кинематика твёрдого тела
Кинематика твёрдого тела изучает движение абсолютно твёрдых тел (тел, расстояние между двумя любыми точками которого не может изменяться).
Так как любое тело ненулевого объёма имеет бесконечное число точек, и соответственно бесконечное число фиксированных связей между ними, тело имеет 6 степеней свободы и его положение в пространстве определяется шестью координатами (если нет дополнительных условий).
Связь скорости двух точек твердого тела выражается через формулу Эйлера:
- ,
где — вектор угловой скорости тела.
Кинематика деформируемого тела, Кинематика жидкости
Основные статьи: Кинематика деформируемого тела, Кинематика жидкости
Кинематика деформируемого тела и кинематика жидкости относятся к кинематике непрерывной среды.
Кинематика газа
Основная статья: Кинематика газа
Кинематика газа изучает деление газа на скопления при движении и описывает движение этих скоплений. В рамках кинематики газа описываются не только основные параметры движения, но и типы движения газа.
Примечания
Литература
- Алешкевич В. А., Деденко Л. Г., Караваев В. А. Механика твердого тела. Лекции. — М.: Изд-во Физического факультета МГУ, 1997.
- Матвеев. А. Н. Механика и теория относительности. — М.: Высшая школа, 1986. (3-е изд. М.: ОНИКС 21 век: Мир и Образование, 2003. — 432с.)
- Павленко Ю. Г. Лекции по теоретической механике. — М.: ФИЗМАТЛИТ, 2002. — 392 с.
- Сивухин Д. В. Общий курс физики. В 5 т. Том I. Механика. 4-е изд. — М.: ФИЗМАТЛИТ; Изд-во МФТИ, 2005. — 560с.
- Стрелков С. П. Механика. — М.: Наука, 1975.
- Яворский Б. М., Детлаф А. А. Справочник по физике для инженеров и студентов вузов (4-е изд.). — М.: Наука, 1968.