Формула силы
Здесь – сила, – масса тела, – ускорение.
Единица измерения силы – Н (ньютон).
Сила, векторная величина, то есть формулу правильнее было бы записать следующим образом:
Вектор силы направлен туда же, куда и ускорение. Если на тело действует несколько сил, то его движение будет обусловлено их равнодействующей. Если равнодействующая всех сил равна нулю, то тело будет находиться в состоянии покоя или двигаться равномерно и прямолинейно.
Формула явно показывает, что сила зависит от ускорения тела, а не от скорости.
Примеры решения задач по теме «Сила»
| Понравился сайт? Расскажи друзьям! | |||
Формула силы в физике
Определение и формула силы
ОпределениеСилы способны изменять скорости тел и вызывать их деформации. Примером деформированного тела служит сжатая (растянутая) пружина.
Две силы считают равными по модулю и противоположными по направлению, если они приложены к одному телу, но ускорение такого тела равно нулю.
Второй закон Ньютона
Равнодействующая всех сил приложенных к телу (векторная сумма всех сил) () равна производной от импульса тела по времени:
где — импульс тела, m–масса рассматриваемого тела, — скорость. Надо отметить, что уравнение (1) строго применимо только относительно материальной точки. Если рассматривается протяженное тело, то под скоростью понимают скорость движения центра масс тела.
Если масса материальной точки (m)не изменяется во времени, то формула, определяющая результирующую силу, приложенную к ней (второй закон Ньютона) можно представить в виде:
где – ускорение, которое материальная точка приобретает в результате воздействия на нее силы. Выражение (2) показывает то, что если =0, то тело (материальная точка) движется равномерно и прямолинейно или покоится.
Если сила, приложенная к телу, является постоянной (по модулю и направлению), то формулу для нее можно представить в виде:
Единицы измерения силы
Основной единицей измерения момента силы в системе СИ является: [F]=Н=(кг•м)/с2
В СГС: [F]=дин
1Н=105 дин
Примеры решения задач
ПримерЗадание. Уравнения ( и – постоянные коэффициенты) задают движение материальной точки массы m=const. Как изменяется по модулю сила, которая действует на точку?
Решение. В качестве основы для решения задачи используем второй закон Ньютона в виде:
Зная законы изменения координат точки в зависимости от времени определим уравнения изменения составляющих ускорения. Для этого найдем производные по времени от соответствующих координат:
Законы силы, формулы
Существует ряд законов, которые характеризуют физические процессы при механических движениях тел.
Выделяют следующие основные законы сил в физике:
- закон силы тяжести;
- закон всемирного тяготения;
- законы силы трения;
- закон силы упругости;
- законы Ньютона.
Закон силы тяжести
Замечание 1
Сила тяжести является одним из случаев проявления действия гравитационных сил.
Силу тяжести представляют в виде такой силы, которая действует на тело со стороны планеты и придает ему ускорение свободного падения.
Свободное падение можно рассмотреть в виде $mg = G\frac{mM}{r^2}$, откуда получаем формулу ускорения свободного падения:
$g = G\frac{M}{r^2}$.
Формула определения силы тяжести будет выглядеть следующим образом:
${\overline{F}}_g = m\overline{g}$
Сила тяжести имеет определенный вектор распространения. Он всегда направлен вертикально вниз, то есть по направлению к центру планеты. На тело действует силы тяжести постоянно и это означает, что оно совершает свободное падение.
Траектория движения при действии силы тяжести зависит от:
- модуля начальной скорости объекта;
- направления скорости движения тела.
С этим физическим явлением человек сталкивается ежедневно.
Силу тяжести можно также представить в виде формулы $P = mg$. При ускорении свободного падения учитываются также дополнительные величины.
Если рассматривать закон всемирного тяготения, который сформулировал Исаак Ньютон, все тела обладают определенной массой. Они притягиваются друг к другу с силой. Ее назовут гравитационной силой.
$F = G\frac{m_1m_2}{r^2}$
Эта сила прямо пропорциональна произведению масс двух тел и обратно пропорциональна квадрату расстояния между ними.
$G = 6,7\cdot {10}^{-11}\ {H\cdot m^2}/{{kg}^2\ }$, где $G$ — это гравитационная постоянная и она имеет по международной системе измерений СИ постоянное значение.
Определение 1
Весом называют силу, с которой тело действует на поверхность планеты после возникновения силы тяжести.
В случаях, когда тело находится в состоянии покоя или равномерно движется по горизонтальной поверхности, тогда вес будет равен силе реакции опоры и совпадать по значению с величиной силы тяжести:
$Р = тg$
При равноускоренном движении вертикально вес будет отличаться от силы тяжести, исходя из вектора ускорения. При направлении вектора ускорения в противоположную сторону возникает состояние перегрузки. В случаях, когда тело вместе с опорой двигаются с ускорением $а = g$, тогда вес будет равен нулю. Состояние с нулевым весом называют невесомостью.
Напряженность поля тяготения высчитывается следующим образом:
$g = \frac{F}{m}$
Величина $F$ — сила тяготения, которая действует на материальную точку массой $m$.
Тело помещается в определенную точку поля.
Потенциальная энергия гравитационного взаимодействия двух материальных точек, имеющих массы $m_1$ и $m_2$, должны находиться на расстоянии $r$ друг от друга.
Потенциал поля тяготения можно найти по формуле:
$\varphi = \Pi / m$
Здесь $П$ — потенциальная энергия материальной точки с массой $m$. Она помещена в определенную точку поля.
Законы силы трения
Замечание 2
Сила трения возникает при движении и направлена против скольжения тела.
Статическая сила трения будет пропорциональна нормальной реакции. Статическая сила трения не лежит в зависимости от формы и размеров трущихся поверхностей. От материала тел, которые соприкасаются и порождают силу трения, зависит статический коэффициент трения. Однако законы трения нельзя назвать стабильными и точными, поскольку часто наблюдаются в результатах исследований различные отклонения.
Традиционное написание силы трения предполагает использование коэффициента трения ($\eta$), $N$ – сила нормального давления.
$F=\eta N$
Также выделяют внешнее трение, силу трения качения, силу трения скольжения, вязкую силу трения и другие виды трения.
Закон силы упругости
Сила упругости равна жёсткости тела, которую помножили на величину деформации:
$F = k \cdot \Delta l$
В нашей классической формуле силы по поиску силы упругости главное место занимают величины жесткости тела ($k$) и деформации тела ($\Delta l$). Единицей измерения силы является ньютон (Н).
Подобная формула может описать самый простой случай деформации. Его принято называть законом Гука. Он гласит, что при попытке любым доступным способом деформировать тело, сила упругости будет стремиться вернуть форму объекта в первоначальный вид.
Для понимания и точного процесса описания физического явления вводят дополнительные понятия. Коэффициент упругости показывает зависимость от:
- свойств материала;
- размеров стержня.
В частности, выделяют зависимость от размеров стержня или площади поперечного сечения и длины. Тогда коэффициент упругости тела записывают в виде:
$k = \frac{ES}{L}$
В такой формуле величина $E$ является модулем упругости первого рода. Также ее называют модулем Юнга. Она отражает механические характеристики определенного материала.
При проведении расчётов прямых стержней применяется запись закона Гука в относительной форме:
$\Delta l = \frac{FL}{ES}$
Отмечается, что применение закона Гука будет носить эффективный характер только при относительно небольших деформациях. Если идет превышение уровня предела пропорциональности, то связь между деформациями и напряжениями становится нелинейной. Для некоторых сред закон Гука нельзя применять даже при небольших деформациях.
Сила тяжести — Википедия
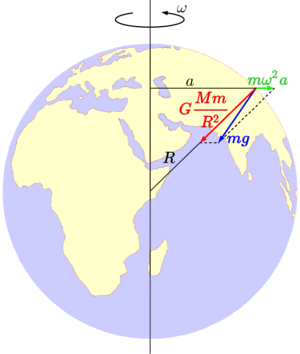 Cила тяжести mg складывается из гравитационного притяжения планеты GMm/r2 и центробежной силы инерции mω2a.
Cила тяжести mg складывается из гравитационного притяжения планеты GMm/r2 и центробежной силы инерции mω2a.Си́ла тя́жести — сила, действующая на любое физическое тело, находящееся вблизи поверхности Земли или другого астрономического тела.
По определению, сила тяжести на поверхности планеты складывается из гравитационного притяжения планеты и центробежной силы инерции, вызванной суточным вращением планеты[1][2].
Остальные силы (например, притяжение Луны и Солнца) ввиду их малости не учитывают или изучают отдельно как временные изменения гравитационного поля Земли[3][4][5].
Сила тяжести сообщает всем телам, независимо от их массы, одно и то же ускорение[6] и является консервативной силой[7].
Сила тяжести P→{\displaystyle {\vec {P}}}, действующая на материальную точку массой m{\displaystyle m}, вычисляется по формуле[6]: P→=mg→{\displaystyle {\vec {P}}=m{\vec {g}}}, где g→{\displaystyle {\vec {g}}} — ускорение, сообщаемое телу силой тяжести, которое называется ускорением свободного падения
Если в пределах протяжённого тела поле сил тяжести однородно, то равнодействующая сил тяжести, действующих на элементы этого тела, приложена к центру масс тела[9].
На тела, движущиеся относительно поверхности Земли, кроме силы тяжести, также действует сила Кориолиса[10][11][12].
Аристотель объяснял силу тяжести движением тяжёлых физических стихий (земля, вода) к своему естественному месту (центру Вселенной внутри Земли), причём скорость тем больше, чем ближе тяжёлое тело к нему[13].
Архимед рассмотрел вопрос о центре тяжести параллелограмма, треугольника, трапеции и параболического сегмента. В сочинении «О плавающих телах» Архимед доказал закон гидростатики, носящий его имя[13].
Иордан Неморарий в сочинении «О тяжестях» при рассмотрении грузов на наклонной плоскости разлагал их силы тяжести на нормальную и параллельную наклонной плоскости составляющие, был близок к определению статического момента [14].
Стевин экспериментально определил, что тела разных масс падают с одинаковым ускорением, установил теоремы о давлении жидкости в сосудах (давление зависит только от глубины и не зависит от величины, формы и объёма сосуда) и о равновесии грузов на наклонной плоскости (на наклонных плоскостях равной высоты силы, действующие со стороны уравновешивающихся грузов вдоль наклонных плоскостей, обратно пропорциональны длинам этих плоскостей). Доказал теорему, согласно которой в случае равновесия центр тяжести однородного плавающего тела должен находиться выше центра тяжести вытесненной жидкости[15].
Галилей экспериментально исследовал законы падения тел (ускорение не зависит от веса тела), колебаний маятников (период колебаний не зависит от веса маятника) и движения по наклонной плоскости
Гюйгенс создал классическую теорию движения маятника, оказавшую значительное влияние на теорию тяготения[16].
Декарт разработал кинетическую теорию тяготения, объяснявшую силу тяжести взаимодействием тел с небесным флюидом, выдвинул гипотезу о зависимости силы тяжести от расстояния между тяжёлым телом и центром Земли[16].
Ньютон из равенства ускорений падающих тел и второго закона Ньютона сделал вывод о пропорциональности силы тяжести массам тел и установил, что сила тяжести является одним из проявлений силы всемирного тяготения[17][18]. Для проверки этой идеи он сравнил ускорение свободного падения тел у поверхности Земли с ускорением Луны на орбите, по которой она движется относительно Земли.[19]
Эйнштейн объяснил факт равенства ускорений падающих тел независимо от их массы (эквивалентность инертной и тяжёлой массы) как следствие принципа эквивалентности равномерно ускоренной системы отсчёта и системы отсчёта, находящейся в гравитационном поле [20].
В соответствии с законом всемирного тяготения, сила гравитационного притяжения, действующая на материальную точку массой m{\displaystyle m} на поверхности сферически симметричного астрономического тела, имеющего массу M{\displaystyle M}, определяется соотношением:
- F=G⋅M⋅mR2,{\displaystyle F=G\cdot {M\cdot m \over R^{2}},}
где G{\displaystyle G} — гравитационная постоянная, равная 6,67384(80)·10−11м3·с−2·кг−1, а R{\displaystyle R} — радиус тела. Данное соотношение справедливо в предположении, что распределение массы по объёму тела сферически симметрично. В этом случае сила гравитационного притяжения направлена к центру тела.
Модуль центробежной силы инерции Q{\displaystyle Q}, действующей на материальную частицу, выражается формулой:
- Q=maω2,{\displaystyle Q=ma\omega ^{2},}
где a{\displaystyle a} — расстояние между частицей и осью вращения рассматриваемого астрономического тела, а ω{\displaystyle \omega } — угловая скорость его вращения. Центробежная сила инерции перпендикулярна оси вращения и направлена в сторону от неё.
Поправки, вносимые общей теорией относительности в закон всемирного тяготения Ньютона, в условиях Земли и других планет крайне малы (модуль гравитационного потенциала на поверхности Земли, равный половине квадрата второй космической скорости vII{\displaystyle v_{II}}, крайне мал по сравнению с квадратом скорости света c{\displaystyle c}: vII22c2∼10−10{\displaystyle {\frac {v_{II}^{2}}{2c^{2}}}\sim 10^{-10}})[21].
Форма Земли (геоид) отличается от шарообразной и близка к сплюснутому эллипсоиду. В этом случае сила гравитационного притяжения, действующая на материальную точку массой m{\displaystyle m}, определяется более сложным выражением, чем ранее:
F→=Gm∫MdMR2R→R.{\displaystyle {\vec {F}}=Gm\int \limits _{M}{{dM} \over {R^{2}}}{{\vec {R}} \over R}.}
Здесь dM{\displaystyle dM} — элемент массы Земли, R→=r→−r→′,{\displaystyle {\vec {R}}={\vec {r}}-{\vec {r}}’,} а r→{\displaystyle {\vec {r}}} и r→′{\displaystyle {{\vec {r}}’}} — радиус-векторы точки измерения и элемента Земли соответственно. Интегрирование при этом выполняется по всей массе Земли.
В векторной форме выражение для центробежной силы инерции можно записать в виде
- Q→=mω2R→0,{\displaystyle {\vec {Q}}=m\omega ^{2}{{\vec {R}}_{0}},}
где R→0{\displaystyle {{\vec {R}}_{0}}} — вектор, перпендикулярный оси вращения и проведённый от неё к данной материальной точке, находящейся вблизи поверхности Земли.
При этом сила тяжести P→{\displaystyle {\vec {P}}}, как и раньше, равна сумме F→{\displaystyle {\vec {F}}} и Q→{\displaystyle {\vec {Q}}}:
- P→=F→+Q→.{\displaystyle {\vec {P}}={\vec {F}}+{\vec {Q}}.}
Сила тяжести, действующая вблизи поверхности Земли, зависит от широты места φ{\displaystyle \varphi } и высоты его H{\displaystyle H} над уровнем моря. Приблизительное выражение для абсолютной величины силы тяжести в системе СИ имеет вид[8]:
- P=9,780318(1+0,005302sinφ−0,000006sin22φ)m−0,000003086Hm.{\displaystyle P=9{,}780318(1+0{,}005302\sin \varphi -0{,}000006\sin ^{2}2\varphi )m-0{,}000003086Hm.}
Угол α{\displaystyle \alpha } между силой тяжести P→{\displaystyle {\vec {P}}} и силой гравитационного притяжения к Земле F→{\displaystyle {\vec {F}}} равен[22]:
- α≈0,0018sin2φ{\displaystyle \alpha \approx 0{,}0018\sin {2\varphi }}.
Он изменяется в пределах от нуля (на экваторе, где φ=0∘{\displaystyle \varphi =0^{\circ }} и на полюсах, где φ=90∘{\displaystyle \varphi =90^{\circ }}) до 0,0018{\displaystyle 0{,}0018} рад или 6′{\displaystyle 6′} (на широте 45∘{\displaystyle 45^{\circ }}).
Движение тел под действием силы тяжести[править | править код]
В том случае, когда модуль перемещения тела много меньше расстояния до центра Земли, то можно считать силу тяжести постоянной, а движение тела равноускоренным. Если начальная скорость тела отлична от нуля и её вектор направлен не по вертикали, то под действием силы тяжести тело движется по параболической траектории.
При бросании тела с некоторой высоты параллельно поверхности Земли дальность полёта увеличивается с ростом начальной скорости. При больших значениях начальной скорости для вычисления траектории тела необходимо учитывать шарообразную форму Земли и изменение направления силы тяжести в разных точках траектории.
При некотором значении скорости, называемом первой космической скоростью, тело, брошенное по касательной к поверхности Земли, под действием силы тяжести при отсутствии сопротивления со стороны атмосферы может двигаться вокруг Земли по окружности, не падая на Землю. При скорости, превышающую вторую космическую скорость, тело уходит от поверхности Земли в бесконечность по гиперболической траектории. При скоростях, промежуточных между первой и второй космическими, тело движется вокруг Земли по эллиптической траектории[23].
Потенциальная энергия поднятого над Землей тела[править | править код]
Потенциальной энергией поднятого над Землей тела называется взятая с обратным знаком работа силы тяжести, совершаемая при перемещении тела с поверхности Земли в это положение. Она равна Ep=γMm(1Rz−1R){\displaystyle E_{p}=\gamma Mm({\frac {1}{R_{z}}}-{\frac {1}{R}})}, где γ{\displaystyle \gamma } — гравитационная постоянная, M{\displaystyle M} — масса земли, m{\displaystyle m} — масса тела, Rz{\displaystyle R_{z}} — радиус Земли, R{\displaystyle R} — расстояние до центра Земли тела.
При удалении тела не небольшие по сравнению с радиусом Земли расстояния от поверхности Земли поле тяготения можно считать однородным, то есть ускорение свободного падения постоянно. В этом случае при подъеме тела массой m{\displaystyle m} на высоту h{\displaystyle h} от поверхности Земли сила тяжести совершает работу A=−mgh{\displaystyle A=-mgh}. Поэтому потенциальная энергия тела: Ep=mgh{\displaystyle E_{p}=mgh}. Потенциальная энергия тела может иметь как положительные, так и отрицательные значения. Тело, находящееся на глубине h{\displaystyle h} от поверхности Земли обладает отрицательным значением потенциальной энергии Ep=−mgh{\displaystyle E_{p}=-mgh}[24].
При испарении воды с поверхности Земли солнечная радиация трансформируется в потенциальную энергию водяного пара в атмосфере. Затем при выпадении атмосферных осадков на сушу она переходит при стоке в кинетическую энергию и совершает эрозионную работу в процессе переноса денудационного материала всей суши и делает возможным жизнь органического мира на Земле[25].
Потенциальная энергия перемещаемых тектоническими процессами масс горных пород в основном тратится на перемещение продуктов разрушения горных пород с повышенных участков поверхности на нижерасположенные[26].
Сила тяжести играет важную роль в процессах эволюции звёзд. Для звёзд, находящихся на этапе главной последовательности своей эволюции, сила тяжести является одним из важных факторов, обеспечивающих условия, необходимые для термоядерного синтеза. На заключительных этапах эволюции звёзд, в процессе их коллапса, благодаря силе тяжести, не скомпенсированной силами внутреннего давления, звёзды превращаются в нейтронные звёзды или чёрные дыры.
Сила тяжести очень важна для формирования структуры внутреннего строения Земли и других планет и тектонической эволюции её поверхности[27]. Чем больше сила тяжести, тем большая масса метеоритного материала выпадает на единицу её поверхности[28]. За время существования Земли её масса существенно увеличилась благодаря силе тяжести: ежегодно на Землю оседает 30-40 млн. тонн метеоритного вещества, в основном в виде пыли, что значительно превышает рассеяние лёгких компонентов верхней атмосферы Земли в космосе[29].
Без потенциальной энергии силы тяжести, непрерывно переходящей в кинетическую, круговорот вещества и энергии на Земле был бы невозможен[30].
Сила тяжести играет очень важную роль для жизни на Земле[31]. Только благодаря ей у Земли есть атмосфера. Вследствие силы тяжести, действующей на воздух, существует атмосферное давление[32].
У всех живых организмов с нервной системой есть рецепторы, определяющие величину и направление силы тяжести и служащие для ориентировки в пространстве. У позвоночных организмов, в том числе человека, величину и направление силы тяжести определяет вестибулярный аппарат[33].
Наличие силы тяжести привело к возникновению у всех многоклеточных наземных организмов прочных скелетов, необходимых для её преодоления. У водных живых организмов силу тяжести уравновешивает гидростатическая сила[34].
Роль силы тяжести в процессах жизнедеятельности организмов изучает гравитационная биология[35].
Сила тяжести и принцип эквивалентности инертной и гравитационной массы используются для определения масс предметов путём их взвешивания на весах. Сила тяжести используется при отстойной сепарации газовых и жидких смесей, в некоторых типах часов, в отвесах и противовесах, машине Атвуда, машине Обербека и жидкостных барометрах. Сила тяжести используется на железнодорожном транспорте для скатывания вагонов с уклона на сортировочных горках, на заводах строительных изделий для транспортировки материалов в спускных лотках и спускных трубах.[36]
Точные измерения силы тяжести и её градиента (гравиметрия) используются при исследовании внутреннего строения Земли и при гравиразведке различных полезных ископаемых[37].
Устойчивость тела в поле силы тяжести[править | править код]
Для тела в поле силы тяжести, опирающегося на одну точку (например при подвешивании тела за одну точку или помещении шара на плоскость) для устойчивого равновесия необходимо, что бы центр тяжести тела занимал наинизшее положение по сравнению со всеми возможными соседними положениями[38].
Для тела в поле силы тяжести, опирающегося на несколько точек (например, стол) или на целую площадку (например, ящик на горизонтальной плоскости) для устойчивого равновесия необходимо, чтобы вертикаль, проведённая через центр тяжести, проходила внутри площади опоры тела. Площадью опоры тела называется контур, соединяющий точки опоры или внутри площадки, на которое опирается тело[38].
Основной источник: [39]Силу тяжести измеряют динамическими и статическими методами. Динамические методы используют наблюдение за движением тела под действием силы тяжести и измеряют время перехода тела из одного заранее определённого положения в другое. Они используют: колебания маятника, свободное падение тела, колебания струны с грузом. Статические методы используют наблюдение за изменением положения равновесия тела под действием силы тяжести и некоторой уравновешивающей её силы и измеряют линейное или угловое смещение тела.
Измерения силы тяжести бывают абсолютными и относительными. Абсолютные измерения определяют полное значение силы тяжести в заданной точке. Относительные измерения определяют разность силы тяжести в заданной точке и некоторого другого, заранее известного значения. Приборы, предназначенные для относительных измерений силы тяжести, называются гравиметрами.
Динамические методы определения силы тяжести могут быть как относительными, так и абсолютными, статические — только относительными.
| Земля | 1,00 | Солнце | 27,85 |
| Луна | 0,165 | Меркурий | 0,375—0,381 |
| Венера | 0,906 | Марс | 0,394 |
| Юпитер | 2,442 | Сатурн | 1,065 |
| Уран | 0,903 | Нептун | 1,131 |
- ↑ Сивухин Д. В. Общий курс физики. — М.: Физматлит, 2005. — Т. I. Механика. — С. 372. — 560 с. — ISBN 5-9221-0225-7.
- ↑ Тарг С. М. Сила тяжести // Физическая энциклопедия / Гл. ред. А. М. Прохоров. — М.: Большая Российская энциклопедия, 1994. — Т. 4. — С. 496. — 704 с. — 40 000 экз. — ISBN 5-85270-087-8.
- ↑ Миронов, 1980, с. 49.
- ↑ Максимальное изменение силы тяжести, обусловленное притяжением Луны, составляет примерно 0,25⋅10−5{\displaystyle 0{,}25\cdot 10^{-5}} м/с2, Солнца 0,1⋅10−5{\displaystyle 0{,}1\cdot 10^{-5}} м/с2
- ↑ Миронов, 1980, с. 71.
- ↑ 1 2 Савельев, 1987, с. 70.
- ↑ Савельев, 1987, с. 82-83.
- ↑ 1 2 Ускорение свободного падения // Физическая энциклопедия / Гл. ред. А. М. Прохоров. — М.: Большая Российская энциклопедия, 1998. — Т. 5. — С. 245—246. — 760 с. — ISBN 5-85270-101-7.
- ↑ Савельев, 1987, с. 156.
- ↑ Тарасов, 2012, с. 200, 270.
- ↑ Савельев, 1987, с. 128.
- ↑ Бутенин, 1971, с. 253-259.
- ↑ 1 2 Зубов В. П. Физические идеи древности // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 38, 54-55;
- ↑ Зубов В. П. Физические идеи средневековья // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 114;
- ↑ Зубов В. П. Физические идеи ренессанса // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 151;
- ↑ 1 2 3 Кузнецов Б. Г. Генезис механического объяснения физических явлений и идеи картезианской физики // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 160-161, 169-170, 177;
- ↑ Ньютон, 1989, с. 7.
- ↑ Кузнецов Б. Г. Основные принципы физики Ньютона // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 189-191;
- ↑ Сивухин Д. В. Общий курс физики. Механика. — М., Наука, 1979. — Тираж 50 000 экз. — с. 323
- ↑ Иваненко Д. Д. Основные идеи общей теории относительности // отв. ред. Григорьян А. Т., Полак Л. С. Очерки развития основных физических идей. — М., АН СССР, 1959. — С. 300;
- ↑ Грищук Л. П., Зельдович Я. Б. Тяготение // Физика космоса. Маленькая энциклопедия. — М., Советская энциклопедия, 1986. — С. 676
- ↑ Савельев, 1987, с. 122.
- ↑ Жирнов Н. И. Классическая механика. — М., Просвещение, 1980. — Тираж 28000 экз. — с. 121
- ↑ Кабардин О.Ф., Орлов В.А., Пономарева А.В. Факультативный курс физики. 8 класс. — М.: Просвещение, 1985. — Тираж 143 500 экз. — С. 151 — 152
- ↑ Криволуцкий, 1985, с. 307.
- ↑ Криволуцкий, 1985, с. 70, 234.
- ↑ Криволуцкий, 1985, с. 208.
- ↑ Криволуцкий, 1985, с. 77.
- ↑ Криволуцкий, 1985, с. 48, 237-238.
- ↑ Криволуцкий, 1985, с. 289.
- ↑ Зельманов А. Л. Многообразие материального мира и проблема бесконечности Вселенной // Бесконечность и Вселенная. — М., Мысль, 1969. — Тираж 12000 экз. — С. 283
- ↑ Хромов С. П., Петросянц М. А. Метеорология и климатология. — М., МГУ, 2006. — ISBN 5-211-05207-2. — C. 67
- ↑ Юрий Фролов. https://www.nkj.ru/archive/articles/21172/ Наш гравитационный компас] // Наука и жизнь. — 2012. — № 10.
- ↑ П. Кемп, К. Армс Введение в биологию. — М.: Мир, 1988. — ISBN 5-03-001286-9. — Тираж 125000 экз. — С. 75
- ↑ Лозовская Е. Жизнь с гравитацией и без нее // Наука и жизнь. — 2004. — № 9.
- ↑ Фиделев А. С. Подъемно-транспортные машины и механизмы. — Киев, Будивельник, 1967. — 187-188
- ↑ Миронов, 1980, с. 1-543.
- ↑ 1 2 Ландсберг Г. С. Элементарный учебник физики. Том 1. Механика, теплота, молекулярная физика. — М., Наука, 1975. — Тираж 350 000 экз. — С. 189-190
- ↑ Миронов, 1980, с. 94-262.
- ↑ У газовых гигантов «поверхность» понимается как область высот в атмосфере, где давление равно атмосферному давлению на Земле на уровне моря (1,013×105Па).
- ↑ Данные взяты из статьи Википедии Ускорение свободного падения
- Ньютон И. Математические начала натуральной философии. — М.: Наука, 1989. — 688 с. — ISBN 5-02-000747-1.
- Савельев И. В. Курс общей физики. Т. 1. Механика. Молекулярная физика. — М.: Наука, 1987. — 688 с.
- Криволуцкий А. Е. Голубая планета. Земля среди планет. Географический аспект.. — М.: Мысль, 1985. — 335 с.
- Миронов В. С. Курс гравиразведки. — Л.: Недра, 1980. — 543 с.
- Тарасов В. Н., Бояркина И. В., Коваленко М. В., Федорченко Н. П., Фисенко Н. И. Теоретическая механика. — М.: ТрансЛит, 2012. — 560 с.
- Бутенин Н. В. Введение в аналитическую механику. — М.: Наука, 1971. — 264 с. — 25 000 экз.
Закон Архимеда — Википедия
Видеоурок: закон АрхимедаЗако́н Архиме́да — один из законов статики жидкостей (гидростатики) и газов (аэростатики): на тело, погружённое в жидкость или газ, действует выталкивающая или подъёмная сила, равная весу объёма жидкости или газа, вытесненного частью тела, погружённой в жидкость или газ. Закон открыт Архимедом в III веке до н. э. Выталкивающая сила также называется архимедовой или гидростатической подъёмной силой[1][2].
Так как сила Архимеда обусловлена силой тяжести, то в невесомости она не действует.
В соответствии с законом Архимеда для выталкивающей силы выполняется[3]:
- FA=ρgV,{\displaystyle F_{A}=\rho gV,}
где:
Выталкивающая или подъёмная сила по направлению противоположна силе тяжести, прикладывается к центру тяжести объёма, вытесняемого телом из жидкости или газа.
Если тело плавает (см. плавание тел) или равномерно движется вверх или вниз, то выталкивающая или подъёмная сила по модулю равна силе тяжести, действующей на вытесненный телом объём жидкости или газа.
 Плавание тела. Сила Архимеда (FA{\displaystyle F_{A}}) уравновешивает вес тела (Fp{\displaystyle F_{p}}):
Плавание тела. Сила Архимеда (FA{\displaystyle F_{A}}) уравновешивает вес тела (Fp{\displaystyle F_{p}}): FA=Fp;{\displaystyle F_{A}=F_{p};}
ρж g Vж = ρт g Vт
Например, воздушный шарик объёмом V{\displaystyle V}, наполненный гелием, летит вверх из-за того, что плотность гелия (ρH{\displaystyle \rho _{H}}) меньше плотности воздуха (ρO{\displaystyle \rho _{O}}):
FA>Fp;{\displaystyle F_{A}>F_{p};}
ρOgV>ρHgV.{\displaystyle \rho _{O}gV>\rho _{H}gV.}
Закон Архимеда можно объяснить при помощи разности гидростатических давлений на примере прямоугольного тела, погруженного в жидкость или газ. В силу симметрии прямоугольного тела, силы давления, действующие на боковые грани тела, уравновешиваются. Давление (PA{\displaystyle P_{A}}) и сила давления (FA{\displaystyle F_{A}}), действующие на верхнюю грань тела, равны:
- PA=ρghA;{\displaystyle P_{A}=\rho gh_{A};}
- FA=ρghAS,{\displaystyle F_{A}=\rho gh_{A}S,}
где:
Давление (PB{\displaystyle P_{B}}) и сила давления (FB{\displaystyle F_{B}}), действующие на нижнюю грань тела, равны:
- PB=ρghB;{\displaystyle P_{B}=\rho gh_{B};}
- FB=ρghBS,{\displaystyle F_{B}=\rho gh_{B}S,}
где:
- PB{\displaystyle P_{B}} — давление, оказываемое жидкостью или газом на нижнюю грань тела, Па;
- FB{\displaystyle F_{B}} — сила давления, действующая на нижнюю грань тела и направленная вверх, Н;
- hB{\displaystyle h_{B}} — расстояние между поверхностью жидкости или газа и нижней гранью тела, м.
Сила давления жидкости или газа на тело определяется разностью сил FB{\displaystyle F_{B}} и FA{\displaystyle F_{A}}:
- FB−FA=ρghBS−ρghAS=ρg(hB−hA)S=ρghS=ρgV,{\displaystyle F_{B}-F_{A}=\rho gh_{B}S-\rho gh_{A}S=\rho g\left(h_{B}-h_{A}\right)S=\rho ghS=\rho gV,}
где:
- h=hB−hA{\displaystyle h=h_{B}-h_{A}} — расстояние между верхней и нижней гранями тела (в случае частичного погружения высота части тела, погружённой в жидкость или газ), м;
- V{\displaystyle V} — объём тела, погружённого в жидкость или газ (в случае частичного погружения объём части тела, погружённой в жидкость или газ), м3.
Разница давлений:
- PB−PA=ρghB−ρghA=ρgh.{\displaystyle P_{B}-P_{A}=\rho gh_{B}-\rho gh_{A}=\rho gh.}
В отсутствие гравитационного поля, то есть, в состоянии невесомости, закон Архимеда не работает. Космонавты с этим явлением знакомы достаточно хорошо. В частности, в невесомости отсутствует явление (естественной) конвекции, поэтому, например, воздушное охлаждение и вентиляция жилых отсеков космических аппаратов необходимо производить принудительно вентиляторами.
Некий аналог закона Архимеда справедлив также в любом поле сил, которое по-разному действуют на тело и на жидкость (газ), либо в неоднородном поле. Например, это относится к полю сил инерции (например, к полю центробежной силы) — на этом основано центрифугирование. Пример для поля немеханической природы: диамагнетик в вакууме вытесняется из области магнитного поля большей интенсивности в область с меньшей.
Вывод закона Архимеда для тела произвольной формы[править | править код]
Гидростатическое давление p{\displaystyle p} на глубине h{\displaystyle h}, оказываемое жидкостью плотностью ρ{\displaystyle \rho } на тело, есть p=ρgh{\displaystyle p=\rho gh}. Пусть плотность жидкости (ρ{\displaystyle \rho }) и напряжённость гравитационного поля (g{\displaystyle g}) — постоянные величины, а h{\displaystyle h} — параметр. Возьмём тело произвольной формы, имеющее ненулевой объём. Введём правую ортонормированную систему координат Oxyz{\displaystyle Oxyz}, причём выберем направление оси z совпадающим с направлением вектора g→{\displaystyle {\vec {g}}}. Ноль по оси z установим на поверхности жидкости. Выделим на поверхности тела элементарную площадку dS{\displaystyle dS}. На неё будет действовать сила давления жидкости, направленная внутрь тела, dF→A=−pdS→{\displaystyle d{\vec {F}}_{A}=-pd{\vec {S}}}. Чтобы получить силу, которая будет действовать на тело, возьмём интеграл по поверхности:
- F→A=−∫SpdS→=−∫SρghdS→=−ρg∫ShdS→=∗−ρg∫Vgrad(h)dV=∗∗−ρg∫Ve→zdV=−ρge→z∫VdV=(ρgV)(−e→z).{\displaystyle {\vec {F}}_{A}=-\int \limits _{S}{p\,d{\vec {S}}}=-\int \limits _{S}{\rho gh\,d{\vec {S}}}=-\rho g\int \limits _{S}{h\,d{\vec {S}}}=^{*}-\rho g\int \limits _{V}{grad(h)\,dV}=^{**}-\rho g\int \limits _{V}{{\vec {e}}_{z}dV}=-\rho g{\vec {e}}_{z}\int \limits _{V}{dV}=(\rho gV)(-{\vec {e}}_{z}).}
При переходе от интеграла по поверхности к интегралу по объёму пользуемся обобщённой теоремой Остроградского-Гаусса.
- ∗h(x,y,z)=z;{\displaystyle {}^{*}h(x,y,z)=z;}
- ∗∗grad(h)=∇h=e→z.{\displaystyle ^{**}grad(h)=\nabla h={\vec {e}}_{z}.}
Получаем, что модуль силы Архимеда равен ρgV{\displaystyle \rho gV}, и направлена сила Архимеда в сторону, противоположную направлению вектора напряжённости гравитационного поля.
Замечание. Закон Архимеда можно также вывести из закона сохранения энергии. Работа силы, действующей со стороны погружённого тела на жидкость, приводит к изменению её потенциальной энергии:
A=−F∗(h2−h3)=−ΔEp=−mжgΔh{\displaystyle \ A=-F*(h2-h3)=-\Delta E_{p}=-m_{\text{ж}}g\Delta h},
где mж−{\displaystyle m_{\text{ж}}-}масса вытесненной части жидкости, Δh{\displaystyle \Delta h} — перемещение её центра масс. Отсюда модуль вытесняющей силы:
F=mжg{\displaystyle \ F=m_{\text{ж}}g}
По третьему закону Ньютона эта сила, равна по модулю и противоположна по направлению силе Архимеда, действующей со стороны жидкости на тело. Объём вытесненной жидкости равен объёму погруженной части тела, поэтому массу вытесненной жидкости можно записать как:
mж=ρжVт,{\displaystyle \ m_{\text{ж}}=\rho _{\text{ж}}V_{\text{т}},} где Vт−{\displaystyle V_{\text{т}}-}объем погружённой части тела.
Таким образом для силы Архимеда имеем:
FA= F=mжg=ρжgVт.{\displaystyle \ F_{A}=\ F=m_{\text{ж}}g=\rho _{\text{ж}}gV_{\text{т}}.}
Поведение тела, находящегося в жидкости или газе, зависит от соотношения между модулями силы тяжести FT{\displaystyle F_{T}} и силы Архимеда FA{\displaystyle F_{A}}, которые действуют на это тело. Возможны следующие три случая:
- FT>FA{\displaystyle F_{T}>F_{A}} — тело тонет;
- FT=FA{\displaystyle F_{T}=F_{A}} — тело плавает в жидкости или газе;
- FT<FA{\displaystyle F_{T}<F_{A}} — тело всплывает до тех пор, пока не начнёт плавать.
Другая формулировка (где ρt{\displaystyle \rho _{t}} — плотность тела, ρs{\displaystyle \rho _{s}} — плотность среды, в которую тело погружено):
- ρt>ρs{\displaystyle \rho _{t}>\rho _{s}} — тело тонет;
- ρt=ρs{\displaystyle \rho _{t}=\rho _{s}} — тело плавает в жидкости или газе;
- ρt<ρs{\displaystyle \rho _{t}<\rho _{s}} — тело всплывает до тех пор, пока не начнёт плавать.
Сила нормальной реакции — Википедия
Материал из Википедии — свободной энциклопедии
Си́ла норма́льной реа́кции (иногда нормальная реакция опоры) — сила, действующая на тело со стороны опоры и направленная перпендикулярно («по нормали», «нормально») к поверхности соприкосновения. Распределена по площади зоны соприкосновения. Подлежит учёту при анализе динамики движения тела. Фигурирует в законе Амонтона — Кулона.
Одним из часто обсуждаемых примеров для иллюстрации силы нормальной реакции является случай нахождения небольшого тела на наклонной плоскости. При этом для простоты считается, что сила реакции приложена в одной точке соприкосновения.
Для расчёта в этом случае используется формула
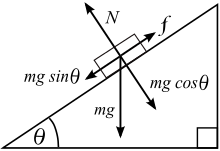 N — сила нормальной реакции, f — сила трения покоя
N — сила нормальной реакции, f — сила трения покоя- |N→|=mgcosθ{\displaystyle |{\vec {N}}|=mg\cos \theta },
где |N→|{\displaystyle |{\vec {N}}|} — модуль вектора силы нормальной реакции, m{\displaystyle m} — масса тела, g{\displaystyle g} — ускорение свободного падения, θ{\displaystyle \theta } — угол между плоскостью опоры и горизонтальной плоскостью.
Выписанной формулой отражается тот факт, что вдоль направления, перпендикулярного наклонной плоскости, движения нет. Это значит, что величина силы нормальной реакции равна проекции силы тяжести mg{\displaystyle mg} на указанное направление.
Из закона Амонтона — Кулона следует, что для модуля вектора силы нормальной реакции справедливо соотношение:
- |N→|=|F→|μ,{\displaystyle |{\vec {N}}|={\frac {|{\vec {F}}|}{\mu }},}
где F→{\displaystyle {\vec {F}}} — сила трения скольжения, а μ{\displaystyle \mu } — коэффициент трения.
Поскольку сила трения покоя вычисляется по формуле
- |f→|=mgsinθ,{\displaystyle |{\vec {f}}|=mg\sin \theta ,}
можно экспериментальным путём найти такое значение угла θ{\displaystyle \theta }, при котором сила трения покоя будет равна силе трения скольжения:
- mgsinθ=μmgcosθ.{\displaystyle mg\sin \theta =\mu mg\cos \theta .}
Отсюда выражается коэффициент трения:
- μ=tg θ.{\displaystyle \mu =\mathrm {tg} \ \theta .}
Формула силы. Сила — формула (физика)
Слово «сила» настолько всеобъемлюще, что дать ему четкое понятие – задача практически невыполнимая. Разнообразие от силы мышц до силы разума не охватывает весь спектр вложенных в него понятий. Сила, рассмотренная как физическая величина, имеет четко определенное значение и определение. Формула силы задает математическую модель: зависимость силы от основных параметров.
История исследования сил включает определение зависимости от параметров и экспериментальное доказательство зависимости.
Сила в физике
Сила – мера взаимодействия тел. Взаимное действие тел друг на друга полностью описывает процессы, связанные с изменением скорости или деформацией тел.
 Как физическая величина сила имеет единицу измерения (в системе СИ – Ньютон) и прибор для ее измерения – динамометр. Принцип действия силомера основан на сравнении силы, действующей на тело, с силой упругости пружины динамометра.
Как физическая величина сила имеет единицу измерения (в системе СИ – Ньютон) и прибор для ее измерения – динамометр. Принцип действия силомера основан на сравнении силы, действующей на тело, с силой упругости пружины динамометра.За силу в 1 ньютон принята сила, под действием которой тело массой 1 кг изменяет свою скорость на 1 м за 1 секунду.
Сила как векторная величина определяется:
- направлением действия;
- точкой приложения;
- модулем, абсолютной величиной.
Описывая взаимодействие, обязательно указывают эти параметры.
Виды природных взаимодействий: гравитационные, электромагнитные, сильные, слабые. Гравитационные силы (сила всемирного тяготения с ее разновидностью – силой тяжести) существуют благодаря влиянию гравитационных полей, окружающих любое тело, имеющее массу. Исследование полей гравитации не закончено до сих пор. Найти источник поля пока не представляется возможным.
Больший ряд сил возникает вследствие электромагнитного взаимодействия атомов, из которых состоит вещество.
Сила давления
При взаимодействии тела с Землей оно оказывает давление на поверхность. Сила давления, формула которой имеет вид: P = mg, определяется массой тела (m). Ускорение свободного падения (g) имеет различные значения на разных широтах Земли.
Сила вертикального давления равна по модулю и противоположна по направлению силе упругости, возникающей в опоре. Формула силы при этом меняется в зависимости от движения тела.
Изменение веса тела
Действие тела на опору вследствие взаимодействия с Землей чаще именуют весом тела. Интересно, что величина веса тела зависит от ускорения движения в вертикальном направлении. В том случае, когда направление ускорения противоположно ускорению свободного падения, наблюдается увеличение веса. Если ускорение тела совпадает с направлением свободного падения, то вес тела уменьшается. К примеру, находясь в поднимающемся лифте, в начале подъема человек чувствует увеличение веса некоторое время. Утверждать, что его масса меняется, не приходится. При этом разделяем понятия «вес тела» и его «масса».
Сила упругости
При изменении формы тела (его деформации) появляется сила, которая стремится вернуть телу его первоначальную форму. Этой силе дали название «сила упругости». Возникает она вследствие электрического взаимодействия частиц, из которых состоит тело.
Рассмотрим простейшую деформацию: растяжение и сжатие. Растяжение сопровождается увеличением линейных размеров тел, сжатие – их уменьшением. Величину, характеризующую эти процессы, называют удлинением тела. Обозначим ее «x». Формула силы упругости напрямую связана с удлинением. Каждое тело, подвергающееся деформации, имеет собственные геометрические и физические параметры. Зависимость упругого сопротивления деформации от свойств тела и материала, из которого оно изготовлено, определяется коэффициентом упругости, назовем его жесткостью (k).
Математическая модель упругого взаимодействия описывается законом Гука.
Сила, возникающая при деформации тела, направлена против направления смещения отдельных частей тела, прямо пропорциональна его удлинению:
- Fy = -kx (в векторной записи).
Знак «-» говорит о противоположности направления деформации и силы.
В скалярной форме отрицательный знак отсутствует. Сила упругости, формула которой имеет следующий вид Fy = kx, используется только при упругих деформациях.
Взаимодействие магнитного поля с током
Влияние магнитного поля на постоянный ток описывается законом Ампера. При этом сила, с которой магнитное поле действует на проводник с током, помещенный в него, называется силой Ампера.
Взаимодействие магнитного поля с движущимся электрическим зарядом вызывает силовое проявление. Сила Ампера, формула которой имеет вид F = IBlsinα, зависит от магнитной индукции поля (В), длины активной части проводника (l), силы тока (I) в проводнике и угла между направлением тока и магнитной индукцией.
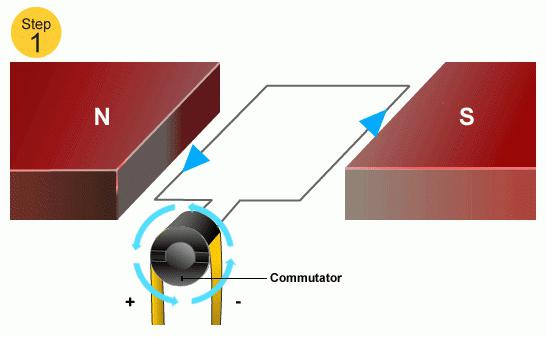
Благодаря последней зависимости можно утверждать, что вектор действия магнитного поля может измениться при повороте проводника или изменении направления тока. Правило левой руки позволяет установить направление действия. Если левую руку расположить таким образом, чтобы вектор магнитной индукции входил в ладонь, четыре пальца были направлены по току в проводнике, то отогнутый на 90° большой палец покажет направление действия магнитного поля.
Применение этому воздействию человечеством найдено, к примеру, в электродвигателях. Вращение ротора вызывается магнитным полем, созданным мощным электромагнитом. Формула силы позволяет судить о возможности изменения мощности двигателя. С увеличением силы тока или величины поля вращательный момент возрастает, что приводит к увеличению мощности двигателя.
Траектории частиц
Взаимодействие магнитного поля с зарядом широко используется в масс-спектрографах при исследовании элементарных частиц.
Действие поля при этом вызывает появление силы, названной силой Лоренца. При попадании в магнитное поле движущейся с некоторой скоростью заряженной частицы сила Лоренца, формула которой имеет вид F = vBqsinα, вызывает движение частицы по окружности.
В этой математической модели v – модуль скорости частицы, электрический заряд которой – q, В – магнитная индукция поля, α – угол между направлениями скорости и магнитной индукции.
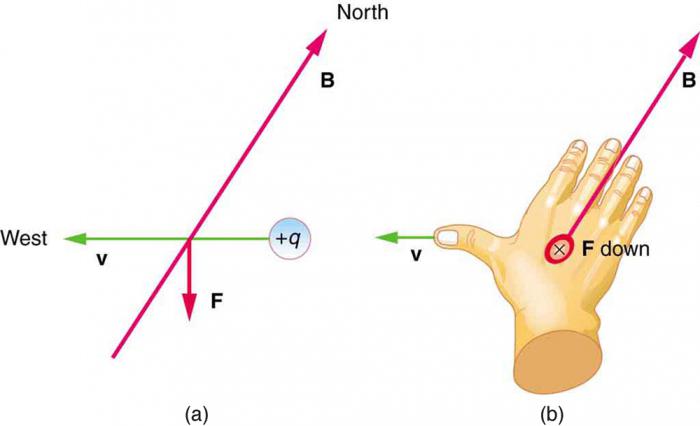
Частица движется по окружности (либо дуге окружности), так как сила и скорость направлены под углом 90° друг к другу. Изменение направления линейной скорости вызывает появление ускорения.
Правило левой руки, рассмотренное выше, имеет место и при изучении силы Лоренца: если левую руку расположить таким образом, чтобы вектор магнитной индукции входил в ладонь, четыре пальца, вытянутых в линию, были направлены по скорости положительно заряженной частицы, то отогнутый на 90° большой палец покажет направление действия силы.
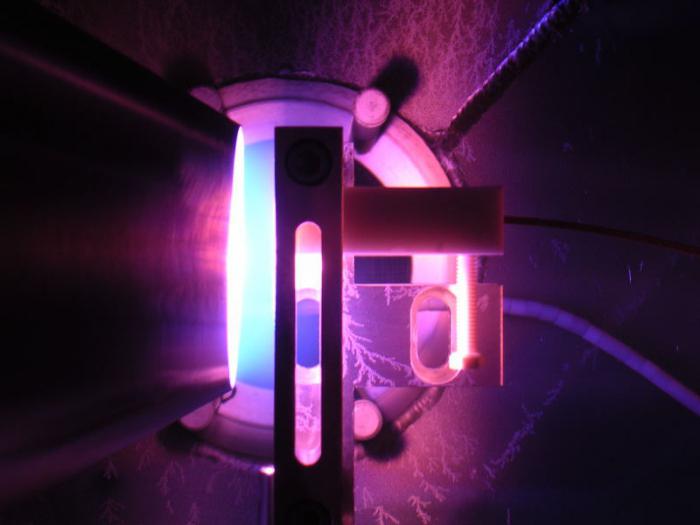
Проблемы плазмы
Взаимодействие магнитного поля и вещества используется в циклотронах. Проблемы, связанные с лабораторным изучением плазмы, не позволяют содержать ее в замкнутых сосудах. Высоко ионизированный газ может существовать только при высоких температурах. Удержать плазму в одном месте пространства можно посредством магнитных полей, закручивая газ в виде кольца. Управляемые термоядерные реакции можно изучать, также закручивая высокотемпературную плазму в шнур при помощи магнитных полей.
Пример действия магнитного поля в естественных условиях на ионизированный газ – Полярное сияние. Это величественное зрелище наблюдается за полярным кругом на высоте 100 км над поверхностью земли. Загадочное красочное свечение газа пояснить смогли лишь в ХХ веке. Магнитное поле земли вблизи полюсов не может препятствовать проникновению солнечного ветра в атмосферу. Наиболее активное излучение, направленное вдоль линий магнитной индукции, вызывает ионизацию атмосферы.

Явления, связанные с движением заряда
Исторически сложилось так, что основной величиной, характеризующей протекание тока в проводнике, называют силу тока. Интересно, что это понятие ничего общего с силой в физике не имеет. Сила тока, формула которой включает заряд, протекающий за единицу времени через поперечное сечение проводника, имеет вид:
- I = q/t, где t – время протекания заряда q.
Фактически, сила тока – величина заряда. Единицей ее измерения является Ампер (А), в отличие от Н.
Определение работы силы
Силовое воздействие на вещество сопровождается совершением работы. Работа силы – физическая величина, численно равная произведению силы на перемещение, пройденное под ее действием, и косинус угла между направлениями силы и перемещения.
Искомая работа силы, формула которой имеет вид A = FScosα, включает величину силы.
Действие тела сопровождается изменением скорости тела или деформацией, что говорит об одновременных изменениях энергии. Работа силы напрямую зависит от величины.