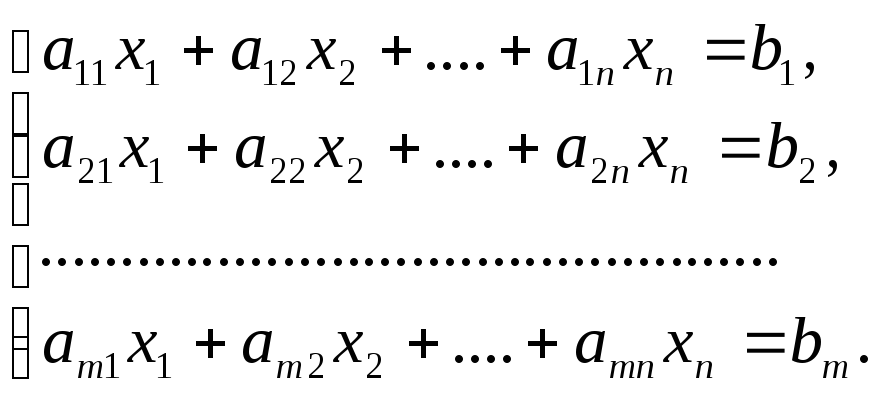
СИстеме линейных уравнений (1) соответствуют три матриц
, .
Первая матрица называется Матрицей системы, вторая — Расширенной или Присойдиненной матрицей системы, третья — Столбцом свободных членов.
Система линейных уравнений называется Системой ступенчатого вида, если расширенная матрица системы есть матрица ступенчатого вида. Неизвестные с коэффициентами неравными нулю, которые стоят первыми в уравнениях системы ступенчатого вида называются Главными неизвестными, а остальные неизвестные называются Свободными.
Линейное уравнение, в котором все коэффициенты равны нулю, а свободный член не равен нулю, т. е. уравнение вида:
,
Не имеет решений. Действительно, если — решение этого уравнения, то получим противоречие с условием. Такое уравнение называем Противоречивым.
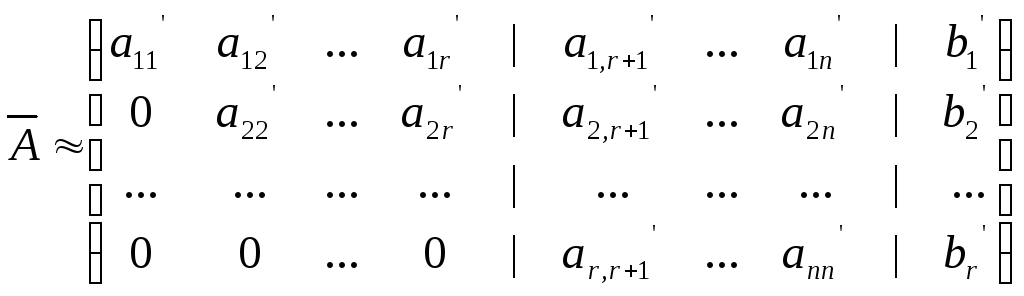
Пусть не все уравнения системы (1) нулевые. Тогда и расширенная матрица системы (1) ненулевая. По теореме 2 ее можно конечным числом элементарных преобразований и преобразований выбрасывания нулевой строки можно привести к матрице ступенчатого вида. Полученной матрице соответствует система линейных уравнений ступенчатого вида. Этим преобразованиям расширенной матрицы системы (1) соответствуют такие же преобразования системы линейных уравнений (1). По теореме 1 они переводят систему (1) в равносильную систему линейных уравнений, которая будет являются системой ступенчатого вида.
Таким образом мы доказали первую часть следующей теоремы.
Теорема 3. Любую систему линейных уравнений, содержащую ненулевое уравнение конечным числом элементарных преобразований и преобразований вычеркивания нулевого уравнения можно привести к равносильной ей системе ступенчатого вида. При этом возможны следующие три случая.
1. Если в полученной системе линейных уравнений ступенчатого вида есть противоречивое уравнение, то данная система не имеет решений
.2. Если в полученной системе линейных уравнений ступенчатого вида нет противоречивого уравнения и число уравнений в полученной системе равно числу неизвестных, то данная система имеет единственное решение.
3. Если в полученной системе линейных уравнений ступенчатого вида нет противоречивого уравнения и число уравнений в полученной системе меньше числа неизвестных, то данная система имеет бесконечно много решение.
Доказательство. Пусть дана система (1), содержащая ненулевое уравнение. По выше доказанному, она конечным числом элементарных преобразований она может быть преобразована к равносильной ей системе уравнений ступенчатого вида. Возможны случаи.
В полученной системе ступенчатого вида есть противоречивое уравнение. Тогда ни один набор чисел Не удовлетворяет системе, и система (1) не имеет решений.
В полученной системе ступенчатого вида нет противоречивого уравнения. Тогда в каждом из уравнений системы ступенчатого вида содержится главное неизвестное. Отсюда получаем, что число главных неизвестных, а тем более число всех неизвестных, не менее числа уравнений в системе ступенчатого вида. Тогда возможны под случаи:
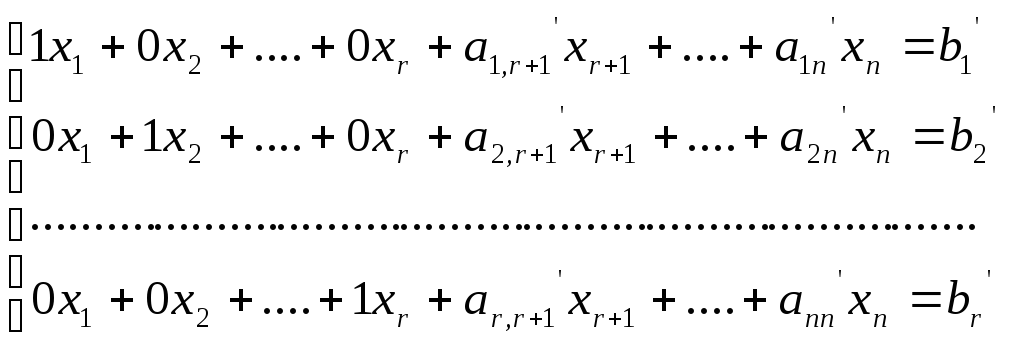
В системе ступенчатого вида число уравнений равно числу неизвестных, т. е. система имеет вид:
(12)
Где Все неизвестные в системе являются главными. Из последнего уравнения находим единственное значение для неизвестного : . Подставляя найденное значение в предпоследнее уравнение, находим для неизвестного единственное значение и т. д. Наконец из первого уравнения по найденным значениям неизвестных из первого уравнения находим единственное значение неизвестного . Таким образом, система (12), а поэтому и система (1) имеет единственное решение.
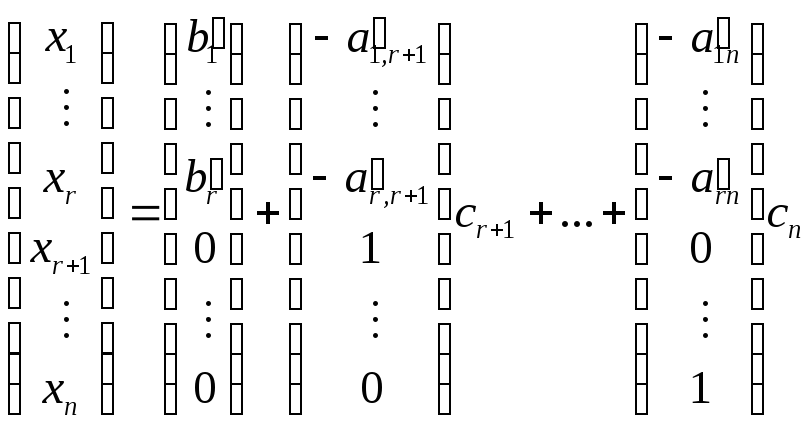
В системе ступенчатого вида число уравнений меньше числа неизвестных. В этом случае матрица полученной системы имеет вид (11), а
Систему можно записать в виде:
(13)
Где В этой системе R главных неизвестных , все остальные Свободные (в системе они обзначены точками. Возьмем для свободных неизвестных произвольные значения. Тогда значения главных неизвестных найдутся однозначно из системы (13). Так как главные неизвестные можно выбрать бесконечным числом способов, то получим, что система (13), а поэтому и система (1) имеет бесконечно много решений.
Теорема доказана.
Следствие. Если в системе однородных уравнений число неизвестных больше числа уравнений, то система имеет бесконечно много решений.
Действительно, система однородных уравнений всегда имеет нулевое решение , и при приведении ее к ступенчатому виду всегда получим систему, в которой число неизвестных больше числа уравнений.
Метод исследования и решения систем линейных уравнений, изложенный в доказательстве теорем 3 называется методом Гаусса.
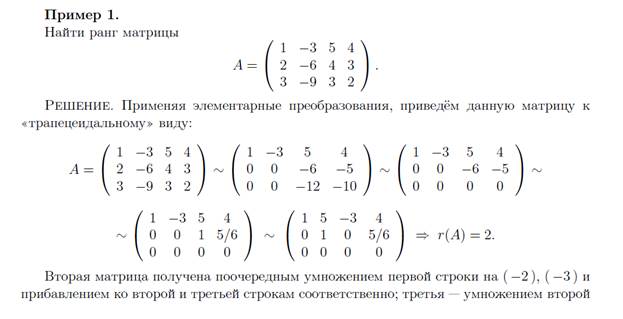
Пример 1. Решить систему
Составим расширенную матрицу системы и приведем ее к ступенчатому виду:
.
Составим по полученной матрице ступенчатого вида систему линейных уравнений ступенчатого вида:
В полученной системе число уравнений равно числу неизвестных и полученная система имеет единственное решение, которое двигаясь вверх последовательно находим:
Решение системы .
Пример 2. Решить систему
Составим расширенную матрицу системы и приведем ее к ступенчатому виду:
Соответствующая система имеет противоречивое уравнение. Поэтому данная система не имеет решений.
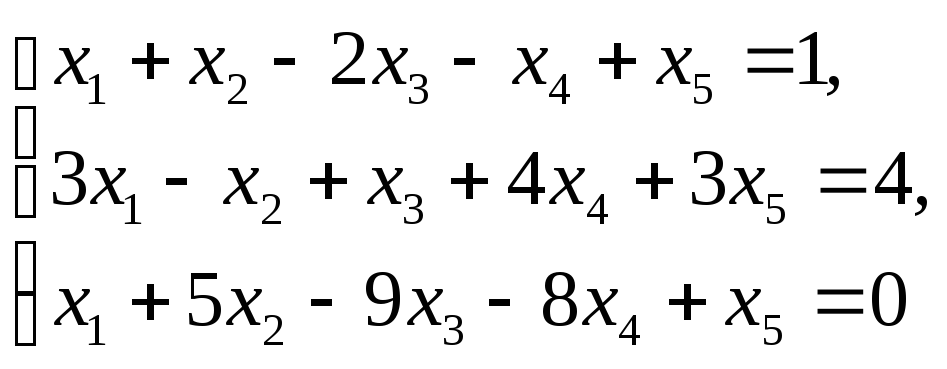
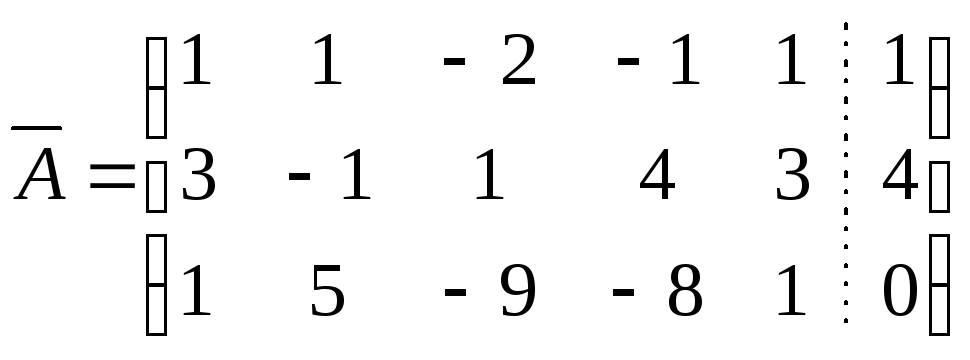
Пример 3. Решить систему
Составим расширенную матрицу системы и приведем ее к ступенчатому виду:
Составим систему ступенчатого вида:
Пусть свободная неизвестная . Тогда находим
Решение системы , где .
| < Предыдущая | Следующая > |
|---|
matica.org.ua
5 Метод Гаусса и теорема Крамера
Лекция 5
ТЕМА: Построение решений систем линейных уравнений
Пусть задана система линейных уравнений
 (4.1)
(4.1)
Если в заданной
системе  ,
то берут любой отличный от нуля минор
основной матрицы порядка
,
то берут любой отличный от нуля минор
основной матрицы порядка  и рассматривают
и рассматривают 
 главных неизвестных, а остальные члены
уравнений, содержащие
главных неизвестных, а остальные члены
уравнений, содержащие  неизвестных, переносятся в правые части
уравнений (выражаются через главные),
затем находят главные неизвестные
(например, по правилу Крамера). При этом
главные неизвестные выражаются через
свободные, каждое из которых может
принимать любое числовое значение.
неизвестных, переносятся в правые части
уравнений (выражаются через главные),
затем находят главные неизвестные
(например, по правилу Крамера). При этом
главные неизвестные выражаются через
свободные, каждое из которых может
принимать любое числовое значение. Полученные решения
новой системы с 
Придавая свободным неизвестным некоторые числовые значения, из общего решения находят соответствующие значения главных неизвестных и тем самым находят частное решение исходной системы уравнений (4.1).
Пример 4.1
Решить систему линейных уравнений:
 ,
найдем ранг матрицы методом «окаймляющих
миноров»:
,
найдем ранг матрицы методом «окаймляющих
миноров»:
 Рассмотрим
миноры третьего порядка:
Рассмотрим
миноры третьего порядка:  ;
;

 система
совместна,
система
совместна,  —
базисный минор;
—
базисный минор;
x, y – главные переменные,
z – свободная переменная.
 решим
систему по правилу Крамера.
решим
систему по правилу Крамера.
 ,
,
 .
.
Общим решением
исходной системы является бесконечное
множество наборов  вида
вида 
Частным решением
будет, например, числовой набор 
Метод Гаусса
(метод последовательного исключения переменных)
На практике чаще всего применяется метод Гаусса – построения решения систем линейных уравнений.
При исследовании
и решении систем линейных уравнений
производятся элементарные преобразования
строк расширенной матрицы  ,
в результате которых получится ступенчатая
расширенная матрица некоторой новой
системы, эквивалентной данной:
,
в результате которых получится ступенчатая
расширенная матрица некоторой новой
системы, эквивалентной данной:
 ,
,  (5.1).
(5.1).
 ненулевой минор порядка
ненулевой минор порядка  ,
т.е. базисный минор (его можно выбрать
на пересечении первых
,
т.е. базисный минор (его можно выбрать
на пересечении первых  строк и столбцов, с которых начинаются
ненулевые элементы строк). Будем считать,
что этот минор расположен в левом верхнем
углу матрицы
строк и столбцов, с которых начинаются
ненулевые элементы строк). Будем считать,
что этот минор расположен в левом верхнем
углу матрицы
Этот минор является
верхнетреугольным и равен произведению  .
.
Нулевые строки матрицы отбросим
(им соответствуют
уравнения  ).
).
 (5.2)
(5.2)
(отбросили нулевые столбцы и перенумеровали переменные).
Все элементы базисного минора выше главной диагонали можно сделать равными нулю, а элементы главной диагонали равными единице. Таким образом, исходная система (4.1) приведена к эквивалентной системе:
 (5.3),
(5.3),
или к системе 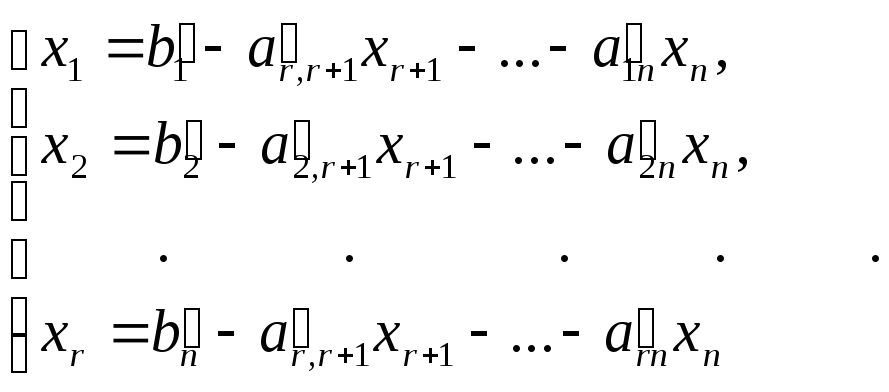 (5.4)
(5.4)
из которой видно,
что если  ,
то система (5.4) имеет единственное
решение:
,
то система (5.4) имеет единственное
решение:
 ,
…,
,
…,  .
.
Если  ,
то переменные
,
то переменные  – базисные,
– базисные,  – свободные и придавая им произвольные
значения
– свободные и придавая им произвольные
значения  ,
…,
,
…,  ,
можно записать общее решение системы
в виде:
,
можно записать общее решение системы
в виде:
 (5.5).
(5.5).
Итак, метод Гаусса состоит в следующем:
расширенную матрицу системы элементарными преобразованиями приводят к ступенчатому виду;
сравнивают ранги основной и расширенной матриц и делают вывод о совместности или несовместности системы;
в случае совместности системы в основной матрице выбирают базисный минор и дальнейшими элементарными преобразованиями строк добиваются того, чтобы в этом миноре все элементы вне главной диагонали стали равными нулю, а элементы главной диагонали стали равными единице;
выписывают систему, соответствующую полученной расширенной матрице, после чего переписывают систему, оставляя базисные неизвестные слева и переведя остальные слагаемые в правую часть;
если
 ,то
в правой части стоят только свободные
члены и получено единственное решение;
,то
в правой части стоят только свободные
члены и получено единственное решение;если
,
то в правой части есть свободные
неизвестные. Придавая им произвольные
значения, получаем общее решение по
формуле (5.5).
 ,то
в правой части стоят только свободные
члены и получено единственное решение;
,то
в правой части стоят только свободные
члены и получено единственное решение; ,
то в правой части есть свободные
неизвестные. Придавая им произвольные
значения, получаем общее решение по
формуле (5.5).
,
то в правой части есть свободные
неизвестные. Придавая им произвольные
значения, получаем общее решение по
формуле (5.5).Пример 5.2
 .
.
Теорема Крамера 5.1
Линейная система
(4.2) с квадратной матрицей  имеет решение,
притом единственное,
тогда и только тогда, когда
имеет решение,
притом единственное,
тогда и только тогда, когда  .
.
Доказательство

 Пусть система
(4.2) имеет и притом единственное решение.
Допустим, что
Пусть система
(4.2) имеет и притом единственное решение.
Допустим, что  .
Это значит, что единственный минор
.
Это значит, что единственный минор  -го
порядка в основной матрице (который
является ее определителем), равен нулю,
и потому
-го
порядка в основной матрице (который
является ее определителем), равен нулю,
и потому  (т.е. ранг матрицы меньше числа неизвестных).
Но согласно следствию (2) теоремы (4.1) в
этом случае система имеет бесконечное
множество решений, что противоречит
условию. Значит допущенное
(т.е. ранг матрицы меньше числа неизвестных).
Но согласно следствию (2) теоремы (4.1) в
этом случае система имеет бесконечное
множество решений, что противоречит
условию. Значит допущенное  неверно, и потому
неверно, и потому  .
.
 Пусть
Пусть  .
Тогда
.
Тогда  ,
а так как
,
а так как  ,
то и
,
то и  .
Но по теореме (4.1) это означает, что СЛУ
(4.2) имеет решение, а так как ранг основной
матрицы системы равен числу неизвестных,
то в силу следствия (1) теоремы (4.1) это
решение единственное.
.
Но по теореме (4.1) это означает, что СЛУ
(4.2) имеет решение, а так как ранг основной
матрицы системы равен числу неизвестных,
то в силу следствия (1) теоремы (4.1) это
решение единственное.
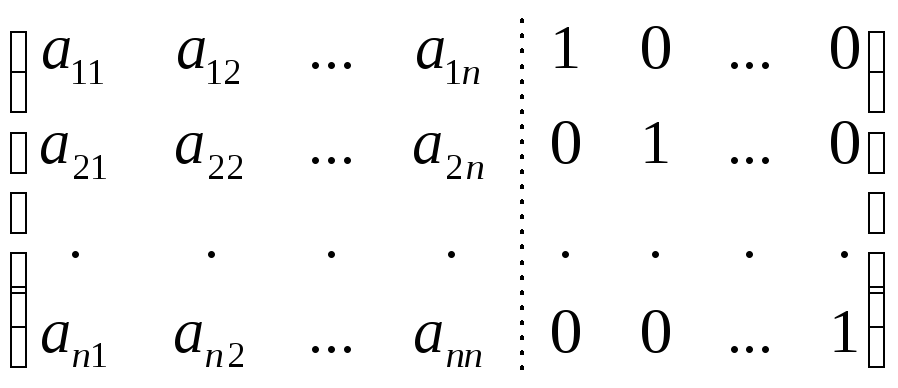
Нахождение обратной матрицы методом Гаусса
Напомним, что
матрица  называется обратной к
называется обратной к  ,
если
,
если  .
Обратные матрицы существуют лишь для
невырожденных матриц, т.е.
.
Обратные матрицы существуют лишь для
невырожденных матриц, т.е.  .
Было показано, что
.
Было показано, что  ,
где
,
где  – присоединенная матрица, полученная
из алгебраических дополнений, т. е.
вычислением определителей
– присоединенная матрица, полученная
из алгебраических дополнений, т. е.
вычислением определителей  -ого
порядка. Вместе с тем, операция вычисления
определителя, запрограммированная в
ЭВМ, требует больших машинных ресурсов.
Поэтому более предпочтительным выглядит
вычисление обратной матрицы с помощью
метода Гаусса.
-ого
порядка. Вместе с тем, операция вычисления
определителя, запрограммированная в
ЭВМ, требует больших машинных ресурсов.
Поэтому более предпочтительным выглядит
вычисление обратной матрицы с помощью
метода Гаусса.
Для этого
воспользуемся определением обратной
матрицы 

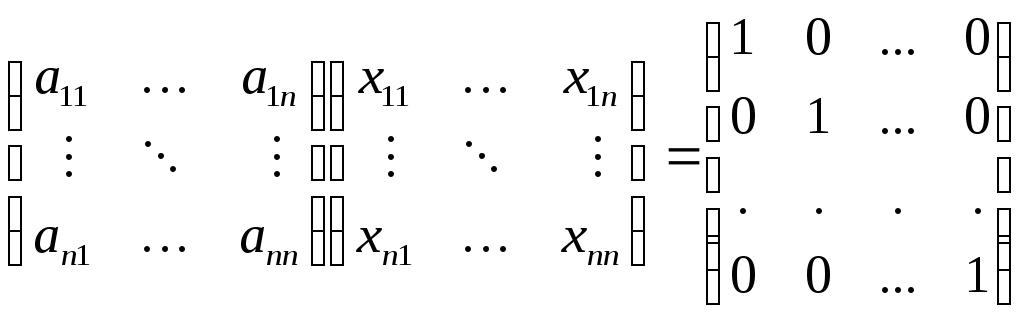

…
 .
.
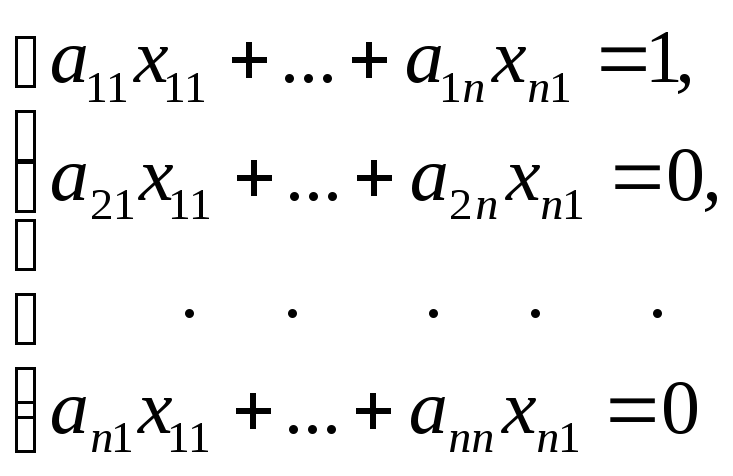
Таким образом,
матричное уравнение  эквивалентно системе линейных уравнений,
состоящей из
эквивалентно системе линейных уравнений,
состоящей из  систем, каждая из которых является
системой из
систем, каждая из которых является
системой из  переменных и все они имеют одну и ту же
основную матрицу системы:
переменных и все они имеют одну и ту же
основную матрицу системы:
 ;
;  ;
…;
;
…; 
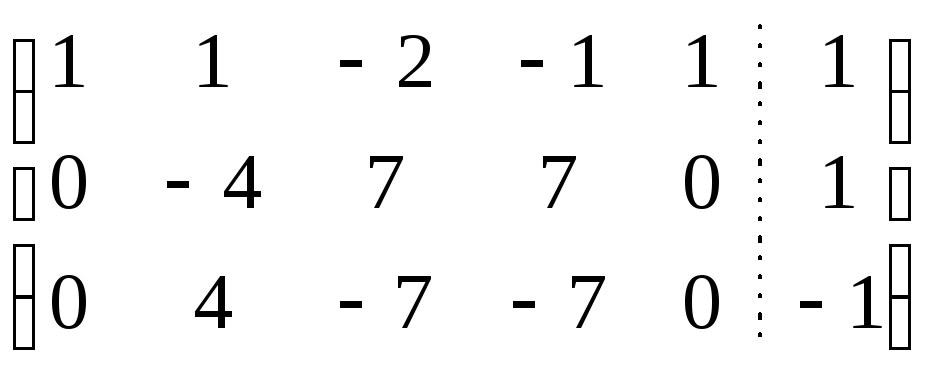
Все эти системы объединим в одной расширенной матрице:
 .
.
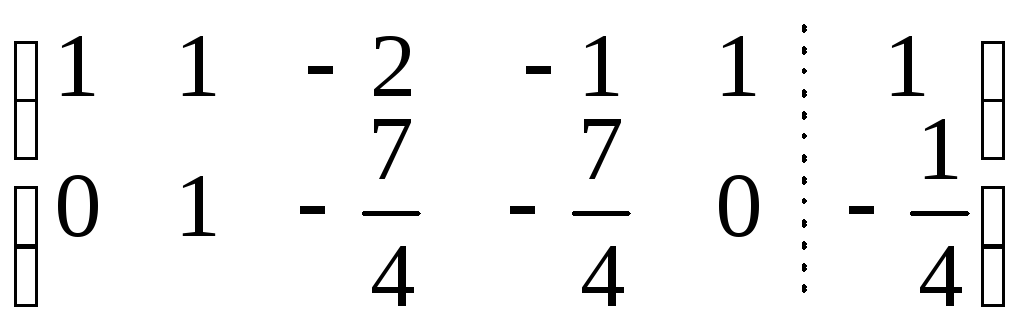
Приведение этой
матрицы к ступенчатому виду должно
обозначать приведение к ступенчатому
виду всех расширенных матриц подсистем.
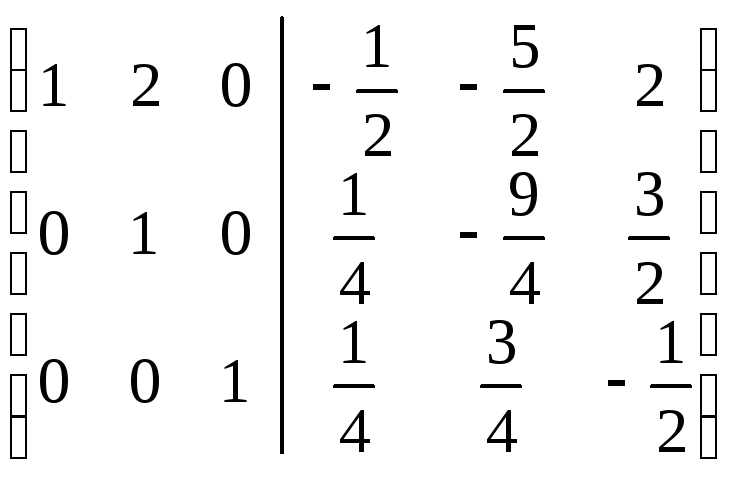
Так как 

 она может быть приведена к следующему
виду:
она может быть приведена к следующему
виду:
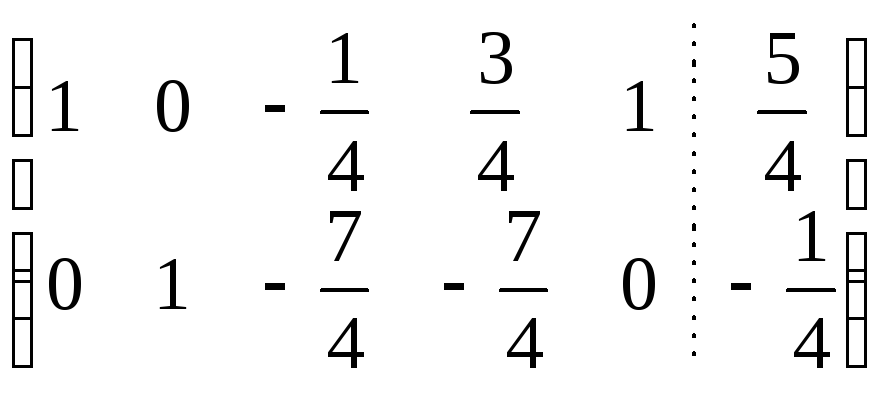
 .
.
Решение каждой из подсистем имеет вид:
 ,
,  ,
…,
,
…, 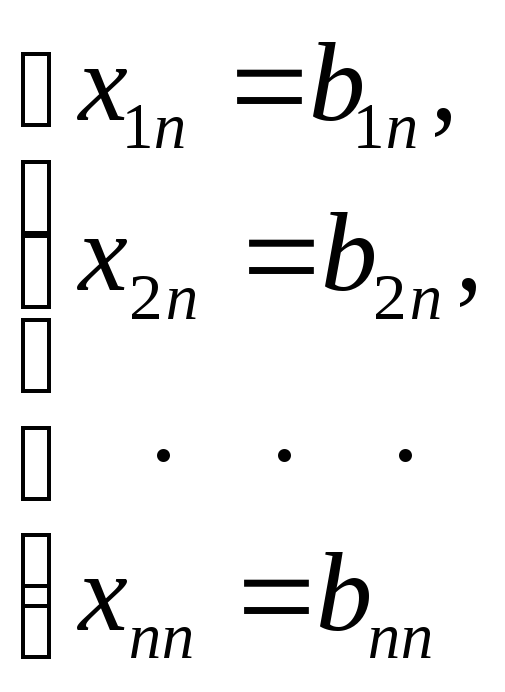

матрица  ,
стоящая за вертикальной чертой, является
обратной матрицей
,
стоящая за вертикальной чертой, является
обратной матрицей  .
.
Пример 5.3



 .
.
7
studfile.net
6.А. Метод Гаусса
Исторически первым, наиболее распространенным методом решения систем линейных уравнений является метод Гаусса, или метод последовательного исключения неизвестных. Сущность этого метода состоит в том, что посредством последовательных исключений неизвестных, данная система превращается в ступенчатую (в частности, треугольную) систему, равносильную данной. При практическом решении системы линейных уравнений методом Гаусса удобнее приводить к ступенчатому виду не саму систему уравнений, а расширенную матрицу этой системы, выполняя элементарные преобразования над ее строками. Последовательно получающиеся в ходе преобразования матрицы обычно соединяют знаком эквивалентности.
Пример 18. Решить систему уравнений методом Гаусса:

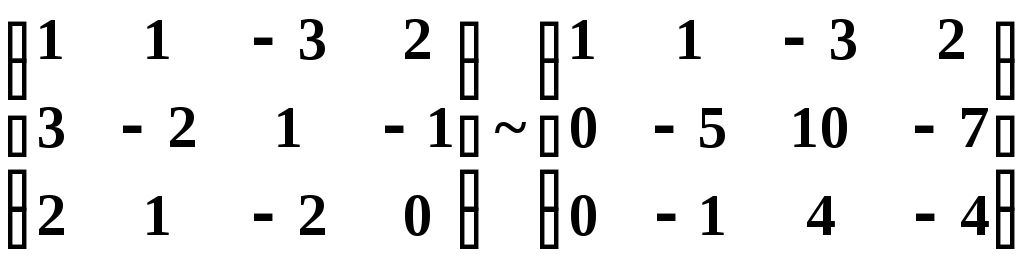
Решение. Выпишем расширенную матрицу данной системы

и произведем следующие элементарные преобразования над ее строками:
а) из ее второй и третьей строк вычтем первую, умноженную соответственно на 3 и 2:
 ;
;
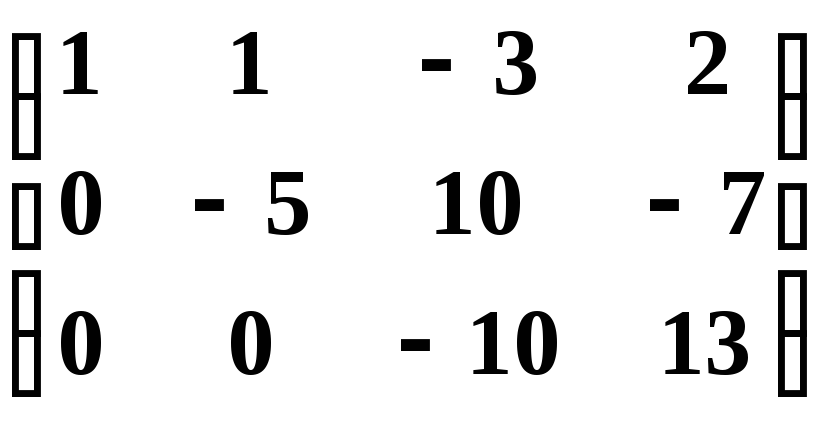
б) третью строку умножим на (- 5) и прибавим к ней вторую:
 .
.
В результате всех этих преобразований данная система приводится к треугольному виду:
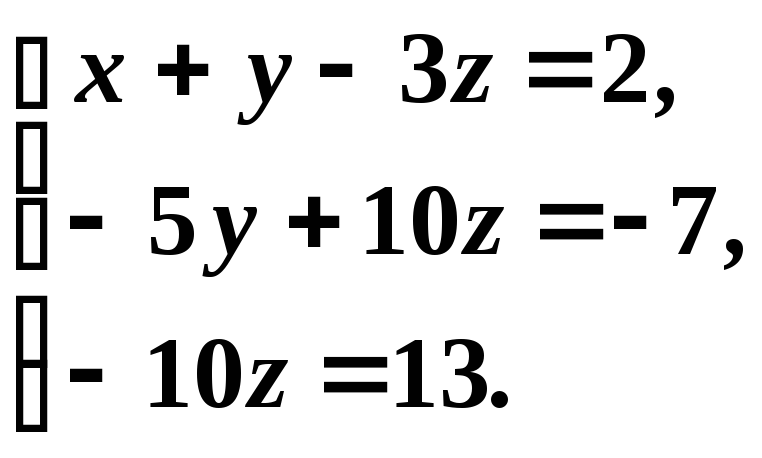
Из
последнего уравнения находим  .
Подставляя это значение во второе
уравнение, имеем
.
Подставляя это значение во второе
уравнение, имеем .
Далее из первого уравнения получим
.
Далее из первого уравнения получим .
.
6.Б. Формулы Крамера
Назовем
столбцы матрицы  следующим образом: первый столбец —
следующим образом: первый столбец — ,
второй столбец —
,
второй столбец — ,
и т.д., последний столбец —
,
и т.д., последний столбец — .
Тогда матрицу
.
Тогда матрицу можно записать в виде
можно записать в виде .
.
Составим  дополнительных матриц:
дополнительных матриц:
 ,
,  ,
…,
,
…, ,
,
и вычислим их определители и определитель исходной матрицы:
 ,
,  ,
, ,
…,
,
…, .
.
Тогда значения неизвестных вычисляются по формулам Крамера:
 ,
,  ,
…,
,
…, .
.
Правило Крамера дает исчерпывающий ответ на вопрос о совместности системы: если главный определитель системы отличен от нуля, то система имеет единственное решение, определяемое по вышеприведенным формулам.
Если
главный определитель системы  и все вспомогательные определители
и все вспомогательные определители равны нулю, то система имеет бесчисленное
множество решений.
равны нулю, то система имеет бесчисленное
множество решений.
Если
главный определитель системы  ,
а хотя бы один вспомогательный определитель
отличен от нуля, то система несовместна.
,
а хотя бы один вспомогательный определитель
отличен от нуля, то система несовместна.
Пример 19. Решить систему уравнений методом Крамера.
 ,
, .
.
Тогда
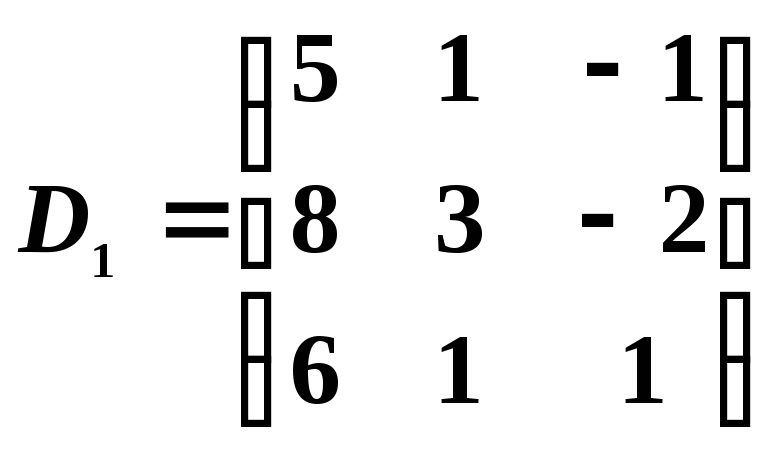 ,
,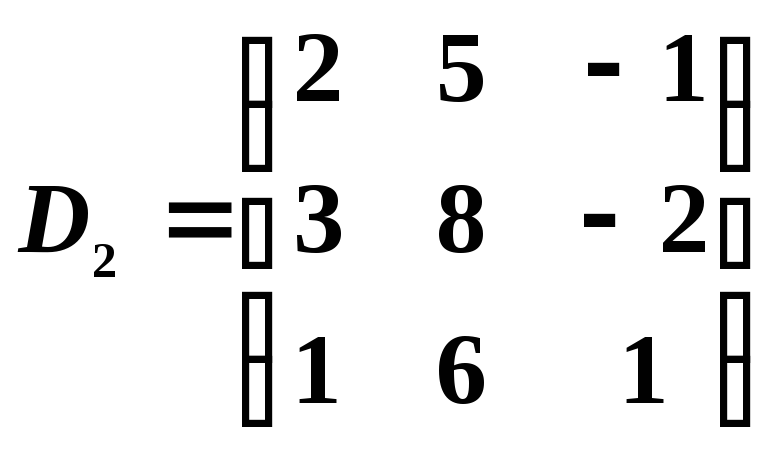 ,
, .
.
Вычисляя определители этих
матриц, получаем  ,
, ,
, ,
, .
.
И по формулам Крамера
находим:  ,
, ,
, .
.
6.В. Матричный метод
Теперь,
рассмотрим матричное уравнение  .
Если у матрицы
.
Если у матрицы существует обратная матрица
существует обратная матрица ,
то, умножая матричное уравнение на
,
то, умножая матричное уравнение на слева, получим:
слева, получим:
 .
.
По
определению обратимости матрицы  и по свойству единичной
и по свойству единичной ,
получаем:
,
получаем:
 .
.
Пример 20. Решить систему уравнений с помощью обратной матрицы.

Имеем:
 ,
, .
.
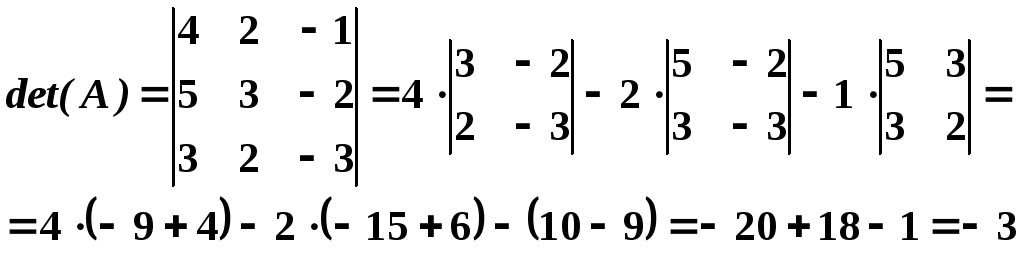
Вычислим определитель
матрицы  ,
разлагая по первой строке:
,
разлагая по первой строке:
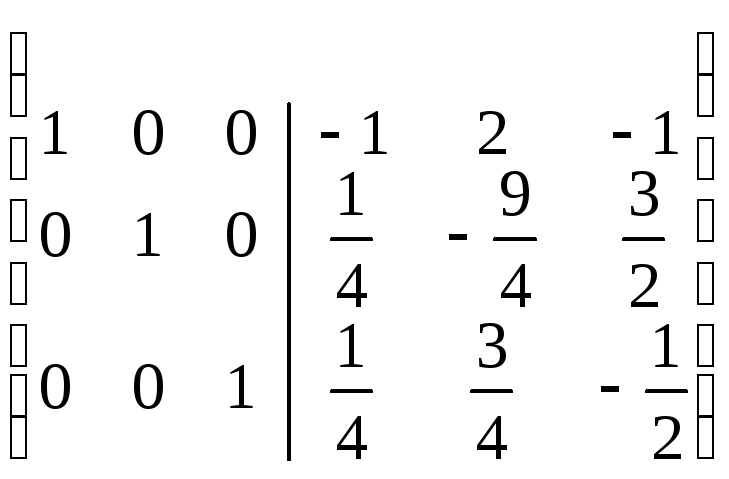
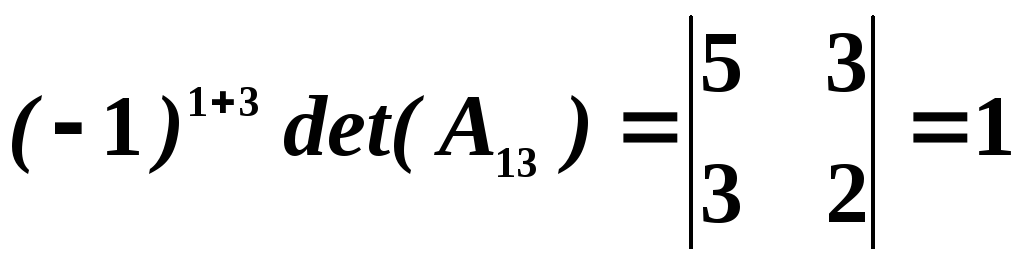
Значит, обратная матрица существует. Вычислим алгебраические дополнения элементов матрицы:
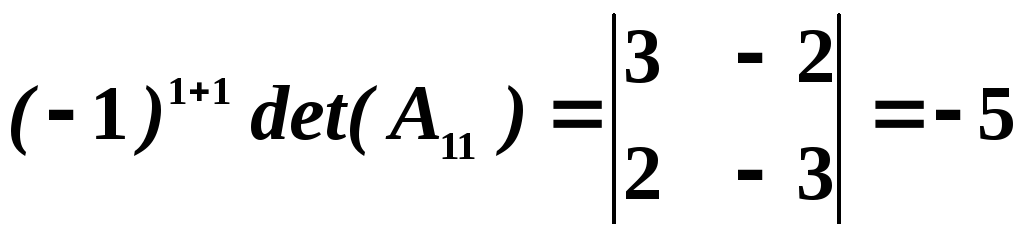 ,
, ,
,
 ,
, ,
,
 ,
, ,
,
 ,
, ,
,
 .
.
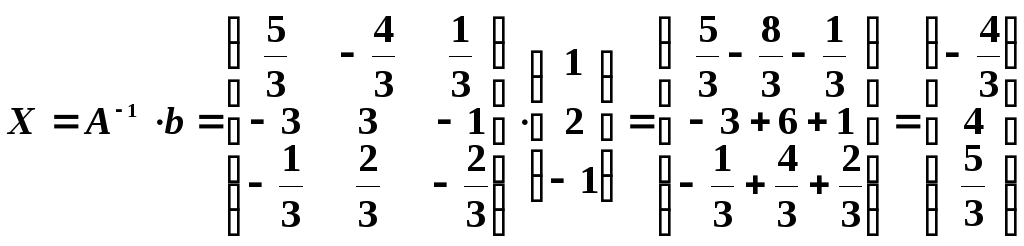
Тогда решение системы получается умножением обратной матрицы на столбец свободных членов
7. Системы линейных уравнений общего вида
Если
система уравнений оказалась совместной,
т. е. матрицы  и
и имеют один и тот же ранг, то могут
представиться две возможности ‑ a)
имеют один и тот же ранг, то могут
представиться две возможности ‑ a) ,
б)
,
б) .
.
а)
Если  ,
то имеем
,
то имеем независимых уравнений с
независимых уравнений с неизвестными, причем определитель
неизвестными, причем определитель этой системы отличен от нуля. Такая
система имеет единственное решение,
получаемое, например, по формулам
Крамера.
этой системы отличен от нуля. Такая
система имеет единственное решение,
получаемое, например, по формулам
Крамера.
б)
Если  ,
то число независимых уравнений меньше
числа неизвестных.
,
то число независимых уравнений меньше
числа неизвестных.
Перенесем
лишние неизвестные  ,
которые принято называть свободными,
в правые части; наша система линейных
уравнений примет вид:
,
которые принято называть свободными,
в правые части; наша система линейных
уравнений примет вид:
Ее
можно решить относительно  ,
так как определитель этой системы (
,
так как определитель этой системы ( порядка) отличен от нуля. Придавая
свободным неизвестным произвольные
числовые значения, получим по формулам
Крамера соответствующие числовые
значения для
порядка) отличен от нуля. Придавая
свободным неизвестным произвольные
числовые значения, получим по формулам
Крамера соответствующие числовые
значения для .
Таким образом, при
.
Таким образом, при имеем бесчисленное множество решений.
имеем бесчисленное множество решений.
Система
уравнений называется однородной,
если все  ,
т. е. она имеет вид:
,
т. е. она имеет вид:
Из
теоремы Кронекера-Капелли следует, что
она всегда совместна, так как добавление
столбца из нулей не может повысить ранга
матрицы. Это, впрочем, видно и непосредственно
— система заведомо обладает нулевым,
или тривиальным, решением  .
Пусть матрица
.
Пусть матрица системы имеет ранг
системы имеет ранг .
.
Если  ,
то нулевое решение будет единственным
решением системы; при
,
то нулевое решение будет единственным
решением системы; при система обладает решениями, отличными
от нулевого, и для их разыскания применяют
тот же прием, как и в случае произвольной
системы уравнений.
система обладает решениями, отличными
от нулевого, и для их разыскания применяют
тот же прием, как и в случае произвольной
системы уравнений.
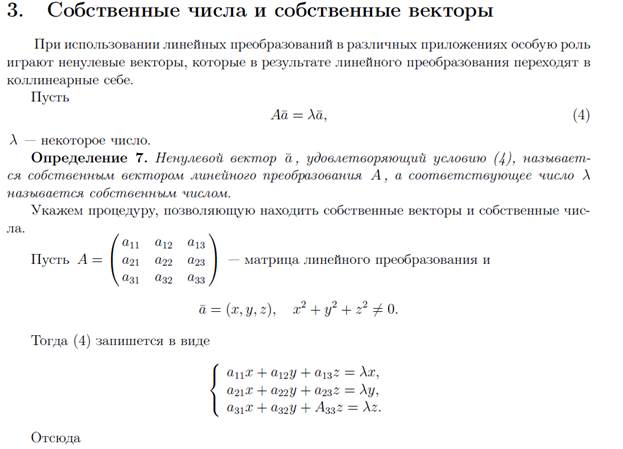
Всякий
ненулевой вектор ‑ столбец  называетсясобственным
вектором линейного преобразования (квадратной
матрицы
называетсясобственным
вектором линейного преобразования (квадратной
матрицы  ), если
найдется такое число
), если
найдется такое число  ,
что будет выполняться равенство
,
что будет выполняться равенство .
.
Число  называетсясобственным
значением линейного преобразования (матрицы
называетсясобственным
значением линейного преобразования (матрицы  ), соответствующим вектору
), соответствующим вектору  .
Матрица
.
Матрица имеет порядок
имеет порядок .
.
В
математической экономике большую роль
играют так называемые продуктивные
матрицы.
Доказано, что матрица  является продуктивной тогда и только
тогда, когда все собственные значения
матрицы
является продуктивной тогда и только
тогда, когда все собственные значения
матрицы по модулю меньше единицы.
по модулю меньше единицы.
Для
нахождения собственных значений матрицы  перепишем равенство
перепишем равенство в виде
в виде ,
где
,
где —
единичная матрица
—
единичная матрица  порядка или в координатной форме:
порядка или в координатной форме:

Получили систему линейных однородных уравнений, которая имеет ненулевые решения тогда и только тогда, когда определитель этой системы равен нулю, т.е.
 .
.
Получили
уравнение  степени относительно неизвестной
степени относительно неизвестной ,
которое называетсяхарактеристическим
уравнением матрицы
,
которое называетсяхарактеристическим
уравнением матрицы  ,
многочлен
,
многочлен называетсяхарактеристическим
многочленом матрицы
называетсяхарактеристическим
многочленом матрицы  ,
а его корни —характеристическими
числами, или собственными значениями,
матрицы
,
а его корни —характеристическими
числами, или собственными значениями,
матрицы  .
.
Для
нахождения собственных векторов матрицы  в векторное уравнение
в векторное уравнение или в соответствующую систему однородных
уравнений нужно подставить найденные
значения
или в соответствующую систему однородных
уравнений нужно подставить найденные
значения и решать обычным образом.
и решать обычным образом.
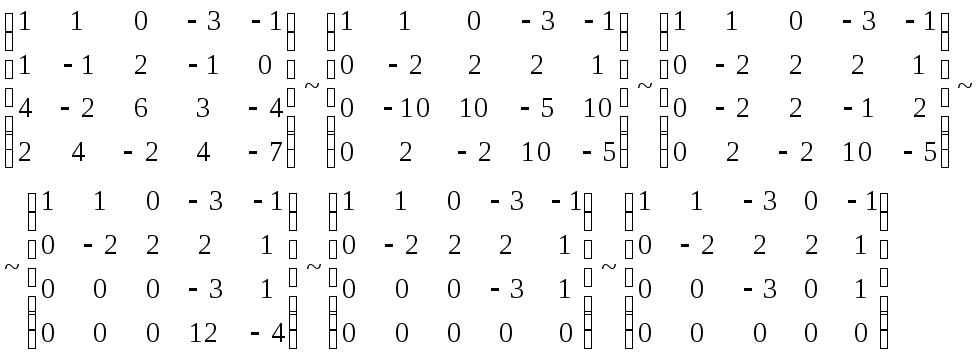
Пример 18. Исследовать систему уравнений и решить ее, если она совместна.
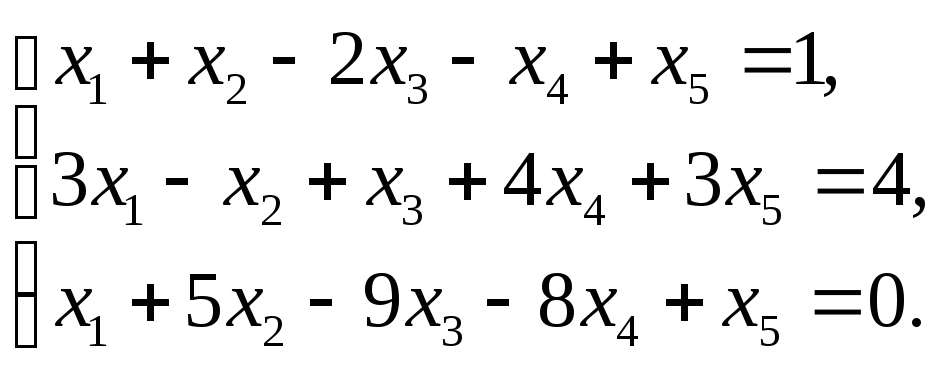
Решение. Будем
находить ранги матриц  и
и методом элементарных преобразований,
приводя одновременно систему к
ступенчатому виду:
методом элементарных преобразований,
приводя одновременно систему к
ступенчатому виду:
 .
.
Очевидно,
что  .
Исходная система равносильна следующей
системе, приведенной к ступенчатому
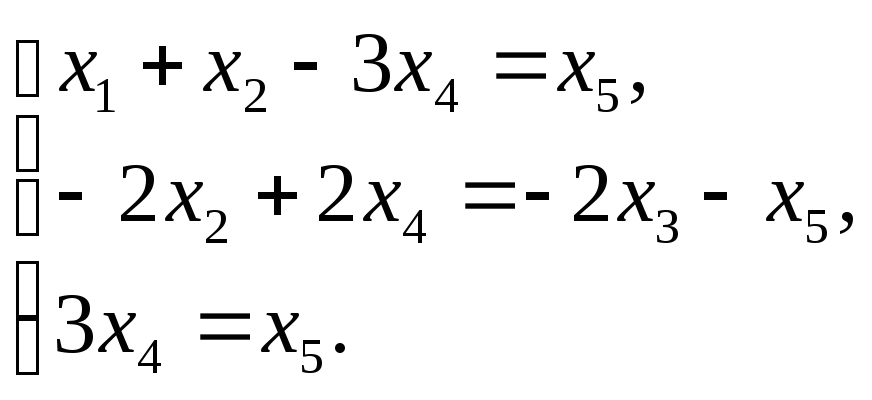
виду:
.
Исходная система равносильна следующей
системе, приведенной к ступенчатому
виду:
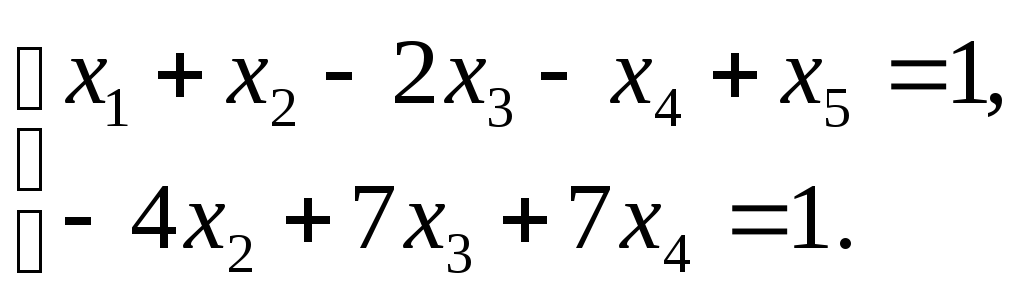
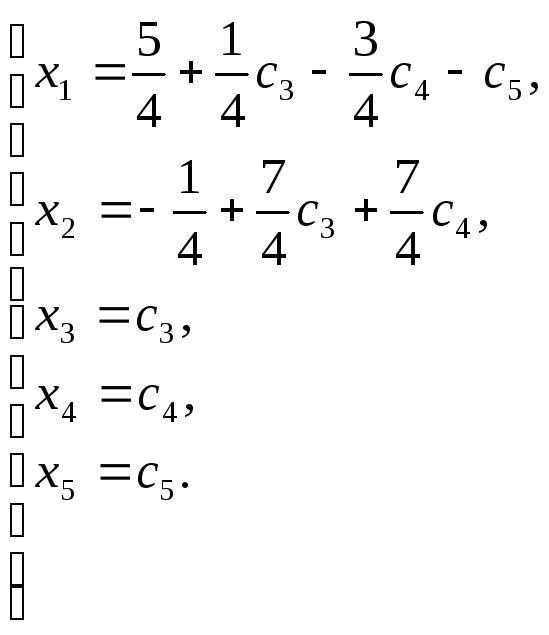
Поскольку определитель при неизвестных x1 и x2отличен от нуля, то их можно принять в качестве главных и переписать систему в виде:
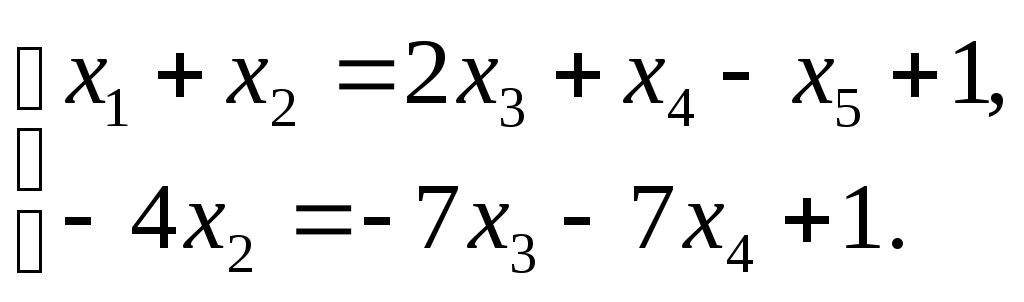
откуда 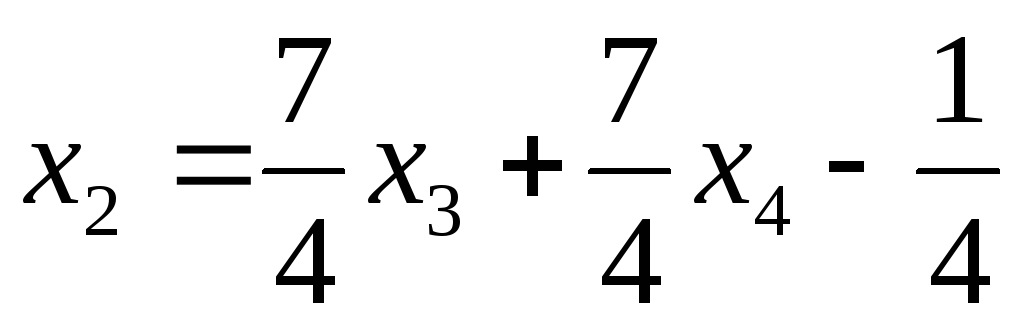 ,
, ‑ общее решение системы, имеющей
бесчисленное множество решений. Придавая
свободным неизвестнымx3,
x4,
x5конкретные
числовые значения, будем получать
частные решения. Например, при
‑ общее решение системы, имеющей
бесчисленное множество решений. Придавая
свободным неизвестнымx3,
x4,
x5конкретные
числовые значения, будем получать
частные решения. Например, при  ,
, ,
, .
Вектор
.
Вектор  является частным решением данной
системы.
является частным решением данной
системы.
Пример
19. Исследовать систему уравнений и найти
общее решение в зависимости от значения
параметра  .
.
Решение. Данной системе соответствует матрица
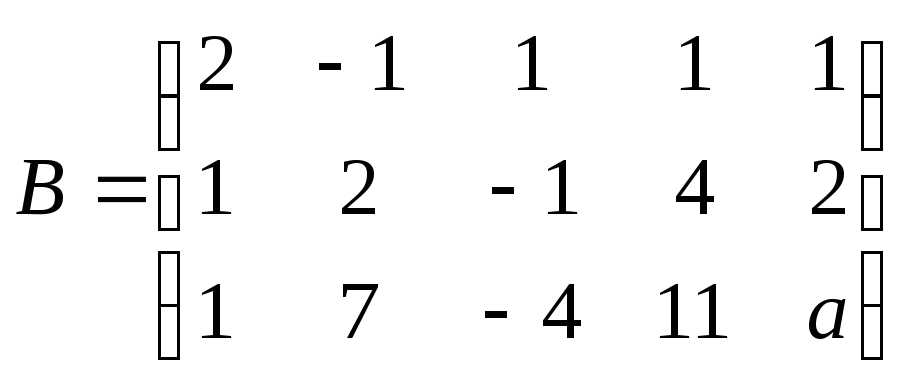 .
.
Имеем
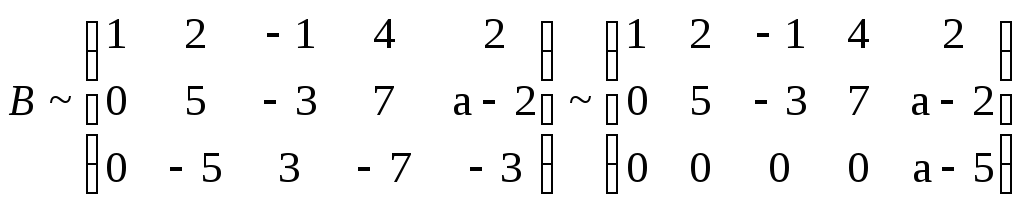
следовательно, исходная система равносильна такой:
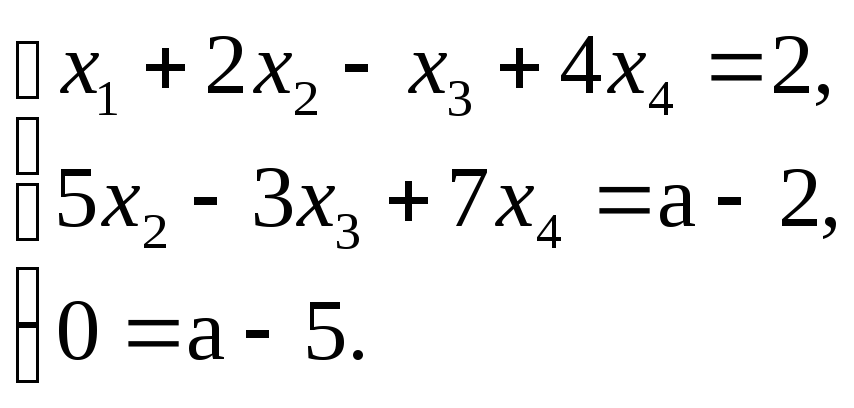
Отсюда
видно, что система совместна только при  .
Общее решение в этом случае имеет вид:
.
Общее решение в этом случае имеет вид:
 ,
,  .
.
Пример 20. Выяснить, будет ли линейно зависимой система векторов:
Решение. Система векторов является линейно зависимой, если найдутся такие числа x1, x2, x3, x4, x5, из которых хотя бы одно отлично от нуля, что выполняется векторное равенство:
 .
.
В координатной записи оно равносильно системе уравнений:
Итак, получили систему линейных однородных уравнений. Решаем ее методом исключения неизвестных:
Система
приведена к ступенчатому виду. Ранг
матрицы равен  ,
значит однородная система уравнений
имеет решения, отличные от нулевого
(
,
значит однородная система уравнений
имеет решения, отличные от нулевого
( ).
Определитель при неизвестныхx1,
x2,
x4 отличен от нуля, поэтому их можно выбрать
в качестве главных и переписать систему
в виде:
).
Определитель при неизвестныхx1,
x2,
x4 отличен от нуля, поэтому их можно выбрать
в качестве главных и переписать систему
в виде:
Имеем:
 ,
,  ,
, .
.
Система имеет бесчисленное множество решений; если свободные неизвестные x3и x5не равны нулю одновременно, то и главные неизвестные отличны от нуля. Следовательно, векторное уравнение

имеет
коэффициенты, не равные нулю одновременно;
пусть например,  ,
, .
Тогда
.
Тогда ,
, ,
, и мы получим соотношение
и мы получим соотношение
 ,
,
т.е. данная система векторов линейно независима.
Пример 21. Найти собственные значения и собственные векторы матрицы
 .
.
Решение. Вычислим
определитель матрицы  :
:

Итак,  .
Корни характеристического уравнения
.
Корни характеристического уравнения ‑ это числа
‑ это числа и
и .
Другими словами, мы нашли собственные
значения матрицы
.
Другими словами, мы нашли собственные
значения матрицы .
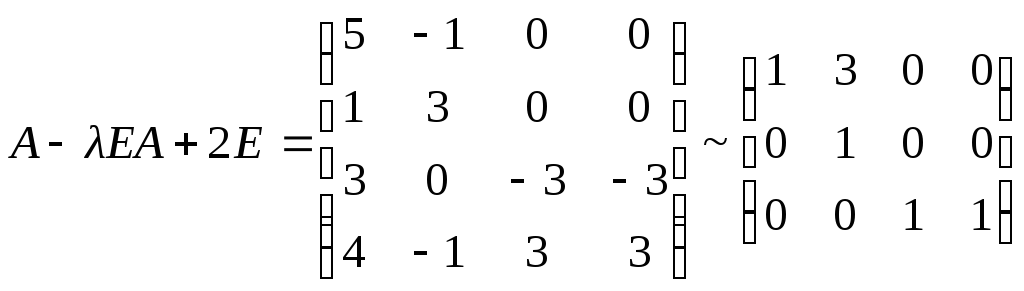
Для нахождения собственных векторов
матрицы
.
Для нахождения собственных векторов
матрицы подставим найденные значения
подставим найденные значения в систему: при
в систему: при имеем систему линейных однородных
уравнений
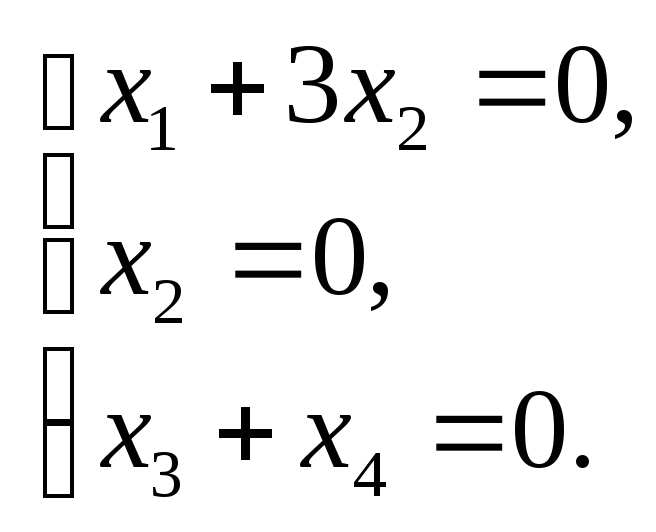
имеем систему линейных однородных
уравнений
Следовательно,
собственному значению  отвечают собственные векторы вида
отвечают собственные векторы вида (8, 8, -3, 15), где
(8, 8, -3, 15), где — любое отличное от нуля действительное
число. При
— любое отличное от нуля действительное
число. При имеем:
имеем:
 ,
,
и поэтому координаты собственных векторов должны удовлетворять системе уравнений
Поэтому
собственному значению  отвечают собственные векторы вида
отвечают собственные векторы вида (0, 0,-1, 1), где
(0, 0,-1, 1), где — любое отличное от нуля действительное
число.
— любое отличное от нуля действительное
число.
FVB
studfile.net
Системы линейных уравнений. Метод Гаусса
Рассмотрим систему линейных уравнений:
С этой системой связываются две матрицы: матрица коэффициентов
и расширенная матрица — с присоединенными свободными членами:
Элементарными преобразованиями системы линейных уравнений называются:
1. умножение уравнения на отличное от нуля число;
2. прибавление к одному уравнению любого другого, умноженного на любое число;
3. перестановка уравнений местами.
Теорема. Любая система линейных уравнений с помощью элементарных преобразований и, может быть, изменением нумерации неизвестных, может быть приведена к системе с трапециевидной матрицей.
Доказательство. Проводим элементарные преобразования только над строками матрицы , как в доказательстве теоремы о ранге матрицы. Возможно, при этом придется изменить нумерацию неизвестных. Приводим систему уравнений к виду
Если хотя бы одно из чисел отлично от нуля, то данная система уравнений решений не имеет (несовместна). Если же все они равны нулю, то последние равенств не несут никакой информации и могут быть отброшены. Тогда, если , то неизвестным можно придавать произвольные значения, а неизвестные находим из решения системы с треугольной матрицей
Эту систему удобно решать, определив из -го уравнения , затем из -го и т.д. Таким образом, можно выразить переменные через и получить общее решение системы. Если , то система (в случае совместности) имеет единственное решение.
Преобразование системы уравнений к системе с трапециевидной матрицей называется прямым ходом метода Гаусса. Последовательное вычисление неизвестных в порядке называется обратным ходом.
Пример. Решить систему линейных уравнений
Решение. Составим расширенную матрицу системы:
Первую строку умножим на 3 и вычтем из второй. Затем первую строку умножим на 2 и вычтем из третьей. Получим
Далее вторую строку прибавим к третьей и отбросим нулевую строку, получим
Запишем полученные уравнения:
Из второго уравнения выразим :
Полученное выражение подставляем в первое уравнение и выражаем из него :
Ответ. Общее решение данной системы:
Задачи.
1. Решите систему линейных уравнений
2. Решите систему линейных уравнений
3. Решите систему линейных уравнений
hijos.ru
§ 12.2 Теорема Гаусса. Применение теоремы Гаусса к расчёту электростатических полей.
Когда зарядов много, при расчётах полей возникают некоторые трудности.
 Преодолеть
их помогает теорема Гаусса. Суть теоремы
Гаусса сводится к следующему: если произвольное
количество зарядов мысленно окружить
замкнутой поверхностью S,
то поток напряжённости электрического
поля через элементарную площадку dS
можно записать как dФ
= Есоsα۰dS
где α
— угол между нормалью к плоскости и
вектором напряжённости
Преодолеть
их помогает теорема Гаусса. Суть теоремы
Гаусса сводится к следующему: если произвольное
количество зарядов мысленно окружить
замкнутой поверхностью S,
то поток напряжённости электрического
поля через элементарную площадку dS
можно записать как dФ
= Есоsα۰dS
где α
— угол между нормалью к плоскости и
вектором напряжённости  .
(рис.12.7)
.
(рис.12.7)
Полный же поток через всю поверхность будет равен сумме потоков от всех зарядов, произвольным образом распределённых внутри её и пропорционально величине этого заряда
 (12.9)
(12.9)
 Определим
поток вектора напряжённости сквозь
сферическую поверхность радиуса r,
в центре которой расположен точечный
заряд +q
(рис.12.8). Линии напряжённости перпендикулярны
поверхности сферы, α =0, следовательно
соsα
= 1. Тогда
Определим
поток вектора напряжённости сквозь
сферическую поверхность радиуса r,
в центре которой расположен точечный
заряд +q
(рис.12.8). Линии напряжённости перпендикулярны
поверхности сферы, α =0, следовательно
соsα
= 1. Тогда
 или
или 
Если поле образовано системой зарядов, то
Теорема Гаусса: поток вектора напряжённости электростатического поля в вакууме сквозь любую замкнутую поверхность равен алгебраической сумме зарядов, заключенных внутри этой поверхности, делённой на электрическую постоянную.
 (12.10)
(12.10)
Если внутри сферы зарядов нет, то Ф = 0.
Теорема Гаусса позволяет сравнительно просто рассчитать электрические поля при симметрично распределённых зарядов.
Введём понятие о плотности распределенных зарядов.
Линейная плотность обозначается τ и характеризует заряд q, приходящийся на единицу длины ℓ. В общем виде может быть рассчитана по формуле
 (12.11)
(12.11)
При
равномерном распределении зарядов
линейная плотность равна 
Поверхностная плотность обозначается σ и характеризует заряд q, приходящийся на единицу площади S. В общем виде определяется по формуле
 (12.12)
(12.12)
При
равномерном распределении зарядов по
поверхности поверхностная плотность
равна 
Объёмная плотность обозначается ρ, характеризует заряд q, приходящийся на единицу объёма V. В общем виде определяется по формуле
 (12.13)
(12.13)
При
равномерном распределении зарядов она
равна  .
.
Н
апряжённость
электростатического поля равномерно
заряженной сферы (рис.12.9),
имеющей радиус r0.
Найдём модуль вектора в какой-либо точке А, находящейся на
расстоянии r1 от центра
этой сферы.
 апряжённость
электростатического поля равномерно
заряженной сферы (рис.12.9),
имеющей радиус r0.
Найдём модуль вектора
апряжённость
электростатического поля равномерно
заряженной сферы (рис.12.9),
имеющей радиус r0.
Найдём модуль вектора  в какой-либо точке А, находящейся на
расстоянии r1 от центра
этой сферы.
в какой-либо точке А, находящейся на
расстоянии r1 от центра
этой сферы.Так как заряд q располагается на сфере равномерно, то
σ
= const.
Применим теорему Гаусса. Проведём сферу
радиусом через точку А. Поток вектора
напряжённости рис.12.9 сквозь
сферическую поверхность радиуса равен  соsα
= 1, так как α
= 0. По теореме Гаусса,
соsα
= 1, так как α
= 0. По теореме Гаусса,  .
.
 или
или 
 (12.14)
(12.14)
Из
выражения (12.14) следует, что напряжённость
поля вне заряженной сферы такая же, как
напряжённость поля точечного заряда,
помещённого в центре сферы. На поверхности
сферы, т.е. r1 = r0 , напряжённость  .
.
Внутри сферы r1 < r0 (рис.12.9) напряжённость Е = 0, так как сфера радиусом r2 внутри никаких зарядов не содержит и, по теореме Гаусса, поток вектора сквозь такую сферу равен нулю.
Цилиндр радиусом r0 равномерно заряжен с поверхностной плотностью σ (рис.12.10). Определим напряжённость поля в произвольно выбранной точке А. Проведём через точку А воображаемую цилиндрическую поверхность радиусом R и длиной ℓ. Вследствие симметрии поток будет выходить только через боковые поверхности цилиндра, так как заряды на цилиндре радиуса r0 распределены по его поверхности равномерно, т.е. линии напряжённости будут радиальными прямыми, перпендикулярными боковым поверхностям обоих цилиндров. Так как поток через основание цилиндров равен нулю (cos α = 0), а боковая поверхность цилиндра перпендикулярна силовым линиям (cos α = 1), то
 или
или
 (12.15)
(12.15)
Выразим величину Е через σ — поверхностную плотность. По определению,
 следовательно,
следовательно, 
Подставим значение q в формулу (12.15)
 (12.16)
(12.16)
По
определению линейной плотности,  , откуда
, откуда  ;
подставляем это выражение в формулу
(12.16):
;
подставляем это выражение в формулу
(12.16):
 (12.17)
(12.17)
т.е. напряжённость поля, создаваемого бесконечно длинным заряженным цилиндром, пропорциональна линейной плотности заряда и обратно пропорциональна расстоянию.
 Определим
напряжённость поля, создаваемого
бесконечной равномерно заряженной
плоскостью в точке А. Пусть поверхностная
плотность заряда плоскости равна σ. В
качестве замкнутой поверхности удобно
выбрать цилиндр, ось которого
перпендикулярна плоскости, а правое
основание содержит точку А. Плоскость
делит цилиндр пополам. Очевидно, что
силовые линии перпендикулярны плоскости
и параллельны боковой поверхности
цилиндра, поэтому весь поток проходит
только через основания цилиндра. На
обоих основаниях напряжённость поля
одинакова, т.к. точки А и В симметричны
относительно плоскости. Тогда поток,
через основания цилиндра равен
Определим
напряжённость поля, создаваемого
бесконечной равномерно заряженной
плоскостью в точке А. Пусть поверхностная
плотность заряда плоскости равна σ. В
качестве замкнутой поверхности удобно
выбрать цилиндр, ось которого
перпендикулярна плоскости, а правое
основание содержит точку А. Плоскость
делит цилиндр пополам. Очевидно, что
силовые линии перпендикулярны плоскости
и параллельны боковой поверхности
цилиндра, поэтому весь поток проходит
только через основания цилиндра. На
обоих основаниях напряжённость поля
одинакова, т.к. точки А и В симметричны
относительно плоскости. Тогда поток,
через основания цилиндра равен

Согласно теореме Гаусса,
Так
как  ,
то
,
то  ,
откуда
,
откуда
 (12.18)
(12.18)
Таким образом, напряжённость поля бесконечной заряженной плоскости пропорциональна поверхностной плотности заряда и не зависит от расстояния до плоскости. Следовательно, поле плоскости является однородным.
 Результирующее
поле, создаваемое двумя плоскостями,
определяется по принципу суперпозиции
полей:
Результирующее
поле, создаваемое двумя плоскостями,
определяется по принципу суперпозиции
полей:  (рис.12.12). Поле, создаваемое каждой
плоскостью, является однородным,
напряжённости этих полей равны по
модулю, но противоположны по направлению:
(рис.12.12). Поле, создаваемое каждой
плоскостью, является однородным,
напряжённости этих полей равны по
модулю, но противоположны по направлению:  .
По принципу суперпозиции напряжённость
суммарного поля вне плоскости равна
нулю:
.
По принципу суперпозиции напряжённость
суммарного поля вне плоскости равна
нулю:

Между плоскостями напряжённости полей имеют одинаковые направления, поэтому результирующая напряжённость равна
 (12.19)
(12.19)
Таким образом, поле между двумя разноименно равномерно заряженными плоскостями однородно и его напряжённость в два раза больше, чем напряжённость поля, создаваемого одной плоскостью. Слева и справа от плоскостей поле отсутствует. Такой же вид имеет и поле конечных плоскостей, искажение появляется только вблизи их границ. С помощью полученной формулы можно рассчитать поле между обкладками плоского конденсатора.
studfile.net
Решение систем линейных уравнений методом Гаусса.
Транспонирование матриц. Обратная матрица. Теорема о существовании обратной матрицы (с доказательством).






4. Ранг матрицы. Элементарные преобразования, не меняющие ранг матрицы (с доказательством).
Ранг матриц 




5. Системы линейных уравнений: основные понятия, теорема Кронекера-Капелли.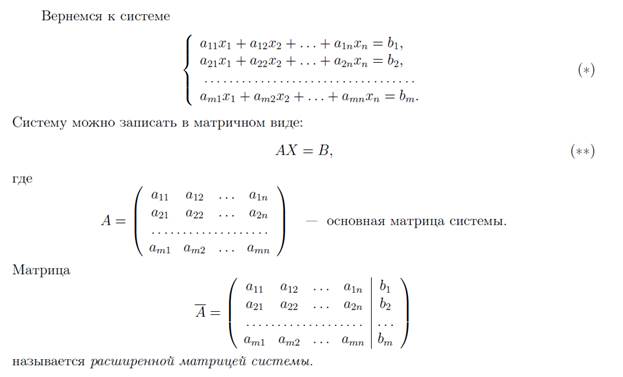



6. Решение систем линейных уравнений: матричный метод, формулы Крамера (с выводом). 

Формулы крамера 


Решение систем линейных уравнений методом Гаусса.







8. Однородные системы линейных уравнений, фундаментальная система решений. 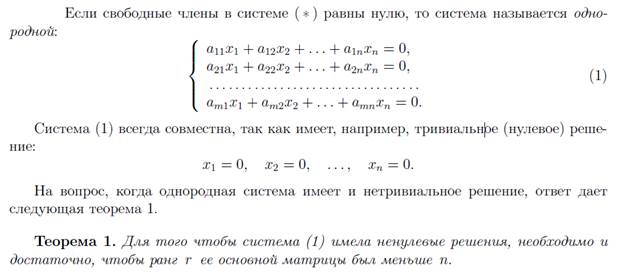







9. Векторы: основные определения, линейные операции над векторами, проекция вектора на ось. 




10. Декартовы прямоугольные координаты вектора в пространстве. Действия над векторами, заданными своими координатами. Деление отрезка в данном отношении. 























11. Скалярное произведение векторов: определение, свойства (с доказательством), формула для вычисления скалярного произведения через координаты векторов. 











12. Векторное произведение векторов: определение, свойства, формула для вычисления векторного произведения через координаты векторов. 






13. Смешанное произведение векторов: определение, свойства, формула для вычисления смешанного произведения через координаты векторов. 




14. Линейная зависимость векторов. Базис. 







15. Линейное преобразование. Собственные числа и собственные векторы линейного преобразования.






 16. Плоскость: уравнение плоскости, проходящей через данную точку перпендикулярно данному вектору; общее уравнение плоскости; исследование общего уравнения плоскости.
16. Плоскость: уравнение плоскости, проходящей через данную точку перпендикулярно данному вектору; общее уравнение плоскости; исследование общего уравнения плоскости. 



17. Плоскость: уравнение плоскости, проходящей через три данные точки; уравнение плоскости «в отрезках». 






18. Плоскость: угол между плоскостями; взаимное расположение двух плоскостей; нахождение расстояния от точки до плоскости. 





19. Прямая в пространстве: общие уравнения прямой; векторное уравнение прямой; параметрические уравнения прямой; угол между прямыми; взаимное расположение двух прямых. 







20. Прямая в пространстве: канонические уравнения прямой; уравнение прямой, проходящей через две точки; переход от общих уравнений прямой к каноническим. 





21. Прямая и плоскость в пространстве: взаимное расположение прямой и плоскости; точка пересечения прямой и плоскости; угол между прямой и плоскостью; пучок плоскостей. 









22. Прямая на плоскости: уравнение прямой, проходящей через данную точку перпендикулярно данному вектору; общее уравнение прямой; исследование общего уравнения прямой; взаимное расположение прямых, заданных общими уравнениями. 



23. Прямая на плоскости: векторное уравнение прямой; параметрические уравнения прямой; каноническое уравнение прямой; уравнение прямой, проходящей через две точки; взаимное расположение двух прямых, заданных каноническими уравнениями. 



24. Прямая на плоскости: уравнение прямой, проходящей через данную точку в заданном направлении; уравнение прямой с угловым коэффициентом; взаимное расположение двух прямых, заданных уравнениями с угловым коэффициентом; расстояние от точки до прямой. 



25. Кривые второго порядка. Эллипс: основные определения; вывод канонического уравнения. 






26. Кривые второго порядка. Гипербола: основные определения; вывод канонического уравнения. 









27. Кривые второго порядка. Парабола: основные определения; вывод канонического уравнения. 



28. Упрощение кривой второго порядка: параллельный перенос системы координат; поворот системы координат. 







29. Полярная система координат. Вывод полярного уравнения эллипса, гиперболы, параболы. 







Читайте также:
Рекомендуемые страницы:
Поиск по сайту
poisk-ru.ru