|
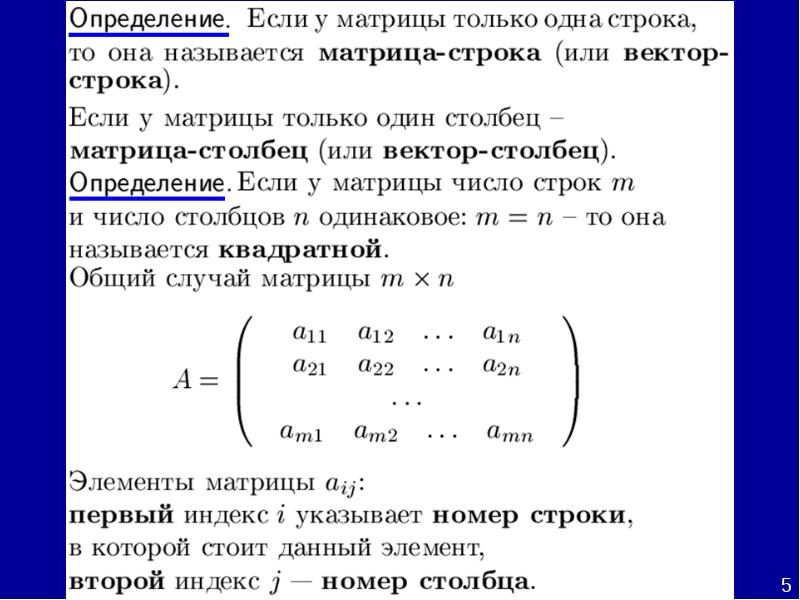
Рассмотрим простейшие матричные уравнения вида А×Х = В (14) и Х×А = В (15). Возможны два случая: 1) матрица А Квадратная невырожденная; 2) матрица А — либо вырожденная, либо прямоугольная. 1) Если А – квадратная и |А| ¹ 0, то уравнения (14) и (15) имеют единственное решение каждое: Х = А-1×В и Х = В×А-1 соответственно, если эти произведения определены. И не имеют решения, если они не определены. 2) А – квадратная матрица, но |А| = 0, либо А — прямоугольная матрица. Если матрица А Имеет размерность M´n, а матрица В – Размерность Р´к, то, при M ¹ Р уравнение (14) не имеет решения, а при N ¹ к не имеет решения уравнение (15). Если же M = Р , то в уравнении (14) матрица Х Должна иметь К столбцов, а в уравнении (15) она должна иметь  Решение этих матричных уравнений сводится к решению систем линейных уравнений. Решение этих матричных уравнений сводится к решению систем линейных уравнений.Пример 5. Найдите матрицу Х, Если А×Х = В, Где А = , В = . Из примера 5 следует, что матрица А Имеет обратную, поэтому Х = А-1×В. Используя найденную в примере 5 матрицу А-1, Получим Х = × = = . Пример 6. Найдите матрицу Х, Если Х×А = В, где А = , В =. Так как |А| = 0, то для А обратной матрицы нет. По правилам умножения матриц, в матрице В Столько строк, сколько их в матрице Х, И столько столбцов, сколько их в матрице А. Последнее условие выполняется, следовательно, уравнение имеет решение. На матрицу Х накладывается ограничения: в матрице Х Должно быть два столбца и три строки. Чтобы найти элементы такой матрицы, обозначим их и перейдём к системе линейных уравнений. Пусть Х = . Тогда Х×А = .
|
 Полученная матрица равна матрице В Тогда и только тогда, когда их соответствующие элементы равны. Получим три системы уравнений. Эти системы не имеют решений, следовательно, не имеет решения и данное матричное уравнение.
Полученная матрица равна матрице В Тогда и только тогда, когда их соответствующие элементы равны. Получим три системы уравнений. Эти системы не имеют решений, следовательно, не имеет решения и данное матричное уравнение.Решение матричных уравнений
Линейная алгебра и, в частности, матрицы — это основа математики нейросетей. Когда говорят «машинное обучение», на самом деле говорят «перемножение матриц», «решение матричных уравнений» и «поиск коэффициентов в матричных уравнениях».
Понятно, что между простой матрицей в линейной алгебре и нейросетью, которая генерирует котов, много слоёв усложнений, дополнительной логики, обучения и т. д. Но здесь мы говорим именно о фундаменте. Цель — чтобы стало понятно, из чего оно сделано.
Краткое содержание прошлых частей:
- Линейная алгебра изучает векторы, матрицы и другие понятия, которые относятся к упорядоченным наборам данных. Линейной алгебре интересно, как можно трансформировать эти упорядоченные данные, складывать и умножать, всячески обсчитывать и находить в них закономерности.
- Вектор — это набор упорядоченных данных в одном измерении. Можно упрощённо сказать, что это последовательность чисел.
- Матрица — это тоже набор упорядоченных данных, только уже не в одном измерении, а в двух (или даже больше).
- Матрицу можно представить как упорядоченную сумку с данными. И с этой сумкой как с единым целым можно совершать какие-то действия. Например, делить, умножать, менять знаки.
- Матрицы можно складывать и умножать на другие матрицы. Это как взять две сумки с данными и получить третью сумку, тоже с данными, только теперь какими-то новыми.

- Матрицы перемножаются по довольно замороченному алгоритму. Арифметика простая, а порядок перемножения довольно запутанный.
И вот наконец мы здесь: если мы можем перемножать матрицы, то мы можем и решить матричное уравнение.
❌ Никакого практического применения следующего материала в народном хозяйстве вы не увидите. Это чистая алгебра в несколько упрощённом виде. Отсюда до практики далёкий путь, поэтому, если нужно что-то практическое, — посмотрите, как мы генерим Чехова на цепях Маркова.
Что такое матричное уравнение
Матричное уравнение — это когда мы умножаем известную матрицу на матрицу Х и получаем новую матрицу. Наша задача — найти неизвестную матрицу Х.
Шаг 1. Упрощаем уравнение
Вместо известных числовых матриц вводим в уравнение буквы: первую матрицу обозначаем буквой A, вторую — буквой B. Неизвестную матрицу X оставляем. Это упрощение поможет составить формулу и выразить X через известную матрицу.
Это упрощение поможет составить формулу и выразить X через известную матрицу.
Шаг 2. Вводим единичную
матрицуВ линейной алгебре есть два вспомогательных понятия: обратная матрица и единичная матрица. Единичная матрица состоит из нулей, а по диагонали у неё единицы. Обратная матрица — это такая, которая при умножении на исходную даёт единичную матрицу.
Можно представить, что есть число 100 — это «сто в первой степени», 1001
И есть число 0,01 — это «сто в минус первой степени», 100-1
При перемножении этих двух чисел получится единица:
1001 × 100-1 = 100 × 0,01 = 1.
Вот такое, только в мире матриц.
Зная свойства единичных и обратных матриц, делаем алгебраическое колдунство. Умножаем обе известные матрицы на обратную матрицу А-1. Неизвестную матрицу Х оставляем без изменений и переписываем уравнение:
Неизвестную матрицу Х оставляем без изменений и переписываем уравнение:
А-1 × А × Х = А-1 × В
Добавляем единичную матрицу и упрощаем запись:
А-1 × А = E — единичная матрица
E × Х = А-1 × В — единичная матрица, умноженная на исходную матрицу, даёт исходную матрицу. Единичную матрицу убираем
Х = А-1 × В — новая запись уравнения
После введения единичной матрицы мы нашли способ выражения неизвестной матрицы X через известные матрицы A и B.
💡 Смотрите, что произошло: раньше нам нужно было найти неизвестную матрицу. А теперь мы точно знаем, как её найти: нужно рассчитать обратную матрицу A-1 и умножить её на известную матрицу B. И то и другое — замороченные процедуры, но с точки зрения арифметики — просто.
Шаг 3. Находим обратную матрицу
Вспоминаем формулу и порядок расчёта обратной матрицы:
- Делим единицу на определитель матрицы A.
- Считаем транспонированную матрицу алгебраических дополнений.
- Перемножаем значения и получаем нужную матрицу.

Собираем формулу и получаем обратную матрицу. Для удобства умышленно оставляем перед матрицей дробное число, чтобы было проще считать.
Третье действие: получаем обратную матрицуШаг 4. Вычисляем неизвестную матрицу
Нам остаётся посчитать матрицу X: умножаем обратную матрицу А-1 на матрицу B. Дробь держим за скобками и вносим в матрицу только при условии, что элементы новой матрицы будут кратны десяти — их можно умножить на дробь и получить целое число.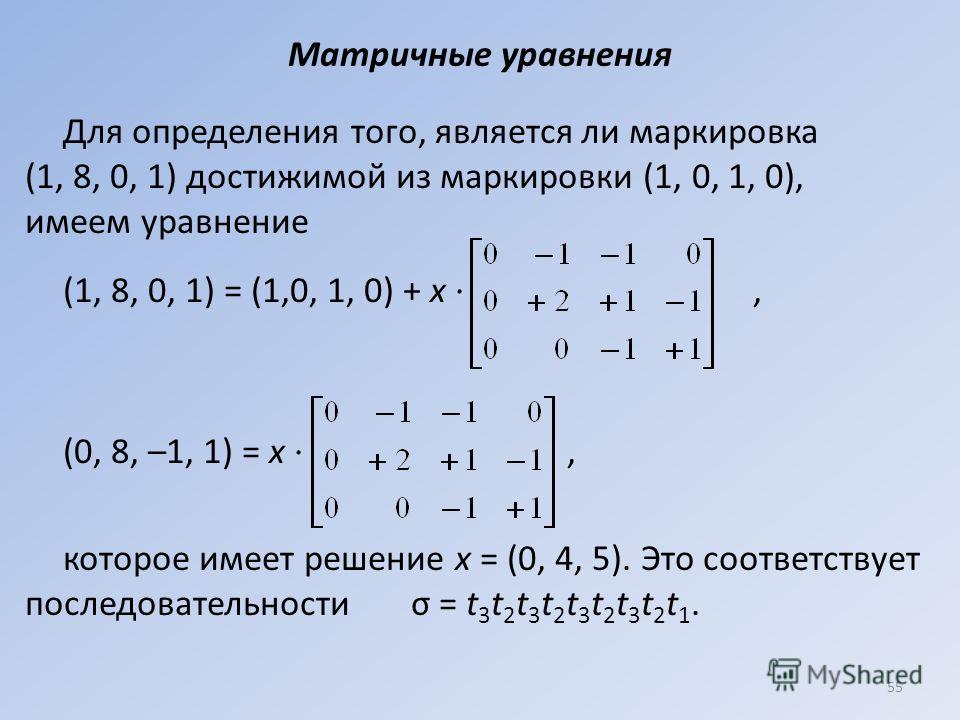 Если кратных элементов не будет — дробь оставим за скобками.
Если кратных элементов не будет — дробь оставим за скобками.
Шаг 5. Проверяем уравнение
Мы решили матричное уравнение и получили красивый ответ с целыми числами. Выглядит правильно, но в случае с матрицами этого недостаточно. Чтобы проверить ответ, нам нужно вернуться к условию и умножить исходную матрицу A на матрицу X. В результате должна появиться матрица B. Если расчёты совпадут — мы всё сделали правильно. Если будут отличия — придётся решать заново.
👉 Часто начинающие математики пренебрегают финальной проверкой и считают её лишней тратой времени. Сегодня мы разобрали простое уравнение с двумя квадратными матрицами с четырьмя элементами в каждой. Когда элементов будет больше, в них легко запутаться и допустить ошибку.
Проверяем ответ и получаем матрицу B — наши расчёты верныНу и что
Алгоритм решения матричных уравнений несложный, если знать отдельные его компоненты. Дальше на основе этих компонентов математики переходят в более сложные пространства: работают с многомерными матрицами, решают более сложные уравнения, постепенно выходят на всё более и более абстрактные уровни. И дальше, в конце пути, появляется датасет из миллионов котиков. Этот датасет раскладывается на пиксели, каждый пиксель оцифровывается, цифры подставляются в матрицы, и уже огромный алгоритм в автоматическом режиме генерирует изображение нейрокотика:
Дальше на основе этих компонентов математики переходят в более сложные пространства: работают с многомерными матрицами, решают более сложные уравнения, постепенно выходят на всё более и более абстрактные уровни. И дальше, в конце пути, появляется датасет из миллионов котиков. Этот датасет раскладывается на пиксели, каждый пиксель оцифровывается, цифры подставляются в матрицы, и уже огромный алгоритм в автоматическом режиме генерирует изображение нейрокотика:
Этого котика не существует, а матрицы — существуют.
Текст:
Александр Бабаскин
Редактура:
Максим Ильяхов
Художник:
Даня Берковский
Корректор:
Ирина Михеева
Вёрстка:
Мария Дронова
Соцсети:
Олег Вешкурцев
21. Матричные уравнения. Теорема существования и единственности решения.
Рассмотрим матричное уравнение вида
где и —
данные матрицы, имеющие одинаковое
количество строк, причем матрица квадратная.
Теорема 4.2 о существовании и единственности решения матричного уравнения (4.5). Если определитель матрицы отличен от нуля, то матричное уравнение (4.5) имеет единственное решение.
В самом деле, подставляя в левую часть равенства (4.5), получаем, т.е. правую часть этого равенства.
Заметим, что решением матричного уравнения служит обратная матрица.
Рассмотрим также матричное уравнение вида
где и — данные матрицы, имеющие одинаковое количество столбцов, причем матрица квадратная. Требуется найти матрицу , удовлетворяющую уравнению (4.6).
Теорема 4.3 о существовании и единственности решения матричного уравнения (4.6). Если определитель матрицы отличен от нуля, то уравнение (4.6) имеет единственное решение.
Заметим,
что матрица является
как бы «левым» частным от «деления»
матрицына
матрицу,
поскольку матрицав
(4.5) умножается наслева,
а матрица—
«правым» частным, так как матрицав
(4.
Пример 4.5. Даны матрицы
Решить уравнения: а) ; б); в).
Решение. Обратная матрица была найдена в примере 4.2.
а) Решение уравнения находим, умножая обе его части слева на
б) Уравнение не имеет решений, так как матрицы иимеют разное количество столбцов.
в) Решение уравнения находим, умножая обе его части справа на
Пример 4.6. Решить уравнение: , где.
Решение. Преобразуя левую часть уравнения:
приведем его к виду (4.1)
где
Следовательно, . Обратная матрица найдена в примере 4.2:
Значит,
Пример 4.7.
Решение. Обратные матрицы были найдены в примерах 4.2, 4.3 соответственно. Решение уравнения находим по формуле
Пример 4.8. Решить уравнение , где
Решение.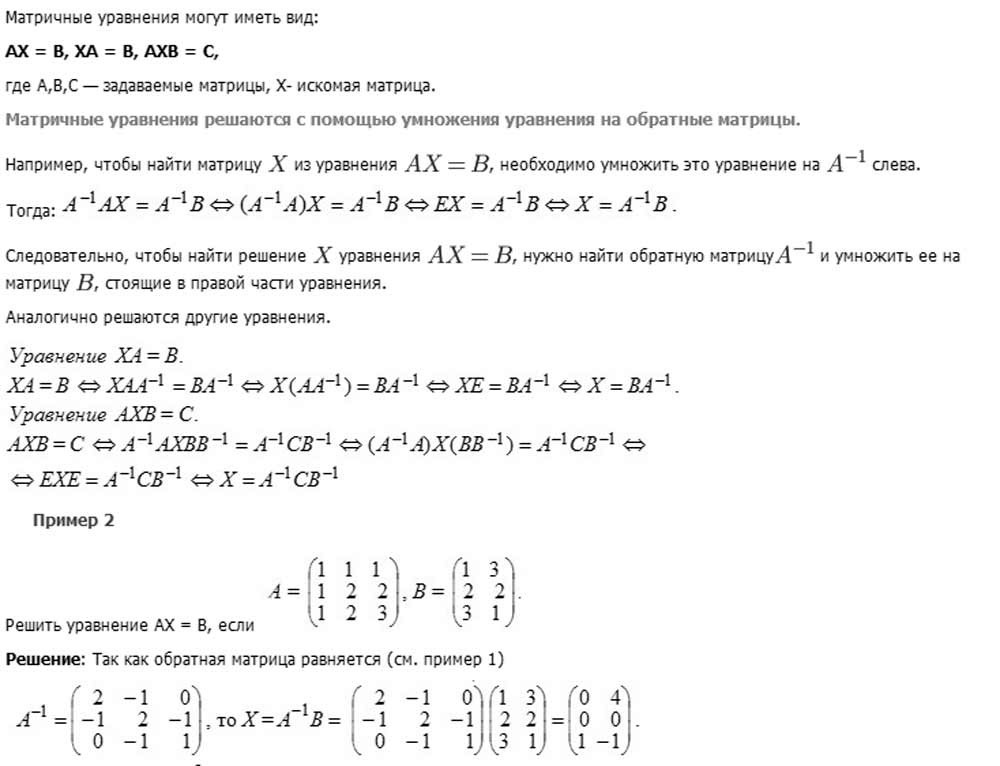 Определитель
матрицы равен
нулю, следовательно, обратная матрица
не существует. Поэтому нельзя использовать
формулу.
Будем искать элементы матрицы.
Подставляя в уравнение, получаем
Определитель
матрицы равен
нулю, следовательно, обратная матрица
не существует. Поэтому нельзя использовать
формулу.
Будем искать элементы матрицы.
Подставляя в уравнение, получаем
Находим произведение, а затем приравниваем соответствующие элементы матриц в левой и правой частях уравнения:
Здесь, учитывая пропорциональность уравнений, в системе оставлены только два уравнения из четырех. Выразим неизвестные и
Следовательно, решение матричного уравнения имеет вид
где параметры и могут принимать любые значения. Таким образом, данное матричное уравнение имеет бесконечное множество решений.
22. Решение системы линейных уравнений матричным методом. Правило Крамера.
Рассмотрим систему уравнений |
— матрица системы |
—
матрицы-столбцы неизвестных и свободных
членов. |
Очевидно, что , |

тогда АХ=С Такое равенство называется матричным уравнением. Если матрица А системы невырожденная, (det А 0), то это уравнение решается следующим образом: Умножим обе его части на матрицу А-1, обратную матрице А А-1(АХ)=А-1С или, (А-1А) · Х = А-1·С. но так как А-1А=Е, и ЕХ=Х Х=А-1С Например, решим матричным способом систему |
матрица системы |
Не является ли матрица А вырожденной? Найдем ее определитель: А =1·[-1·4 – 1·2] – 1·[2·4 – 2·4] + 2·[2·1 – 4·(-1)] = -6 + 12 = 6 Определитель
не равен нулю, то есть матрица не
вырожденная. А11 = (-1)1+1·М11 = (+1)·[-1·4 – 1·2] = -6 А12 = (-1)1+2·М12 = (-1)·[2·4 – 2·4] = 0 А13 = (-1)1+3·М13 = (+1)·[2·1 – 4·(-1)] = 6 А21 = (-1)2+1·М21 = (-1)·[1·4 – 1·2] = -2 А22 = (-1)2+2·М22 = [1·4 – 2·4] = -4 А23 = (-1)2+3·М23 = (-1)·[1·1 – 4·1] = 3 А31 = (-1)3+1М31 = [1·2 – (-1)·2] = 4 А32 = (-1)3+2·М32 = [(-1)·1·2 – 2·2] = 2 А33 = (-1)3+3·М33 = [1·(-1) – 2·1] = -3 |
 Значит, существует
обратная матрица
Значит, существует
обратная матрица Можно
убедиться проверкой в правильности
решения: подставим вектор Х в
первоначальное матричное уравнение. Действительно вектор Х удовлетворяет заданной системе |

Решение систем уравнений методом Крамера Применим теперь наши знания о матрицах к решению систем уравнений первой степени. Рассмотрим систему двух уравнений с двумя неизвестными: |
или коротко или АХ=С |
система записана в матричном виде (как произведение матриц) Решим эту простенькую систему школьными методами. Умножим первое уравнение на а 22, а второе на (-а12) и сложим (а11а22 – а21а12)х1 = с1а22 – с2а12 аналогично (а11а22 – а21а12)х2 = с2а11 – с1а21 |
1)
но а11а22 –
а21а12 = —
это определитель матрицы А(det А)
или его еще называют определитель
системы и он составлен из коэффициентов
при неизвестных. |
2) определитель,
который получится из det А, если
в нем столбец коэффициентов при
х1 (первый
столбец) заменить на столбец правых
частей. Обозначим его |
3) |
 Обозначим его
Обозначим его
|
Видим, что <=»» font=»»> |
Как вы понимаете, если мы возьмем систему трех уравнений с тремя неизвестными или n уравнений с n неизвестными, то формулы останутся те же: |
Эти
формулы широко известны и называются
формулами Крамера. Возможны 3 случая: 1. 0 Тогда xi= xi/ — решение существует, причем единственное. 2. =0 , а какой-либо из xi 0 , то есть у нас в xi= xi/ производится деление на 0, система не имеет решения (несовместна). 3. =0 и все xi=0 то система имеет бесконечно много решений. Пример: |
 Мы же с Вами займемся
анализом того существует ли решение
и единственно ли оно?
Мы же с Вами займемся
анализом того существует ли решение
и единственно ли оно?Так как второе уравнение получается из первого умножением на 2, то наша система равносильна такой системе. |
Так
получилось, потому что первое и второе
уравнения систем эквивалентны и
фактически мы имеем систему двух
уравнений с тремя неизвестными, то
есть неопределенную систему. получим систему |
 Она имеет бесчисленное множество
решений. Положив, например, z=0
Она имеет бесчисленное множество
решений. Положив, например, z=0Решив ее, найдем 11х=0, х=0, y=1 То есть решение первоначальной системы x=0, y=0, z=0. Если бы мы положили z=1, получили бы еще один ответ и так далее. |
Теорема (правило Крамера). Если определитель системы Δ ≠ 0, то рассматриваемая система имеет одно и только одно решение, причём
Доказательство. Итак, рассмотрим систему 3-х уравнений с тремя неизвестными. Умножим 1-ое уравнение системы на алгебраическое дополнение A11 элемента a11, 2-ое уравнение – наA21 и 3-е – на A31:
Сложим эти уравнения:
Рассмотрим
каждую из скобок и правую часть этого
уравнения. По теореме о разложении
определителя по элементам 1-го столбца
По теореме о разложении
определителя по элементам 1-го столбца
.
Далее рассмотрим коэффициенты при x2:
Аналогично можно показать, что и .
Наконец несложно заметить, что
Таким образом, получаем равенство: .
Следовательно, .
Аналогично выводятся равенства и , откуда и следует утверждение теоремы.
Таким образом, заметим, что если определитель системы Δ ≠ 0, то система имеет единственное решение и обратно. Если же определитель системы равен нулю, то система либо имеет бесконечное множество решений, либо не имеет решений, т.е. несовместна.
Матричные уравнения с примерами решения
Содержание:
- Примеры с решением
Обратной матрицей к квадратной матрице А называется такая матрица (обозначаетсячто ЛЗамечание. Если матрица существует, то она единственна.
Присоединенной матрицей к квадратной матрице называется матрица полученная транспонированием из матрицы, составленной из алгебраических дополнений к элементам Теорема 1. 3. Если квадратная матрица А — невырожденная (т. е. ), то (4.1)
3. Если квадратная матрица А — невырожденная (т. е. ), то (4.1)
Метод присоединенной матрицы вычисления обратной матрицы к невырожденной матрице А состоит в применении формулы (4.1). Метод элементарных преобразований (метод Гаусса) вычисления обратной матрицы к невырожденной матрице А состоит в следующем.
Приписывая справа к матрице А размера единичную матрицу размера получим прямоугольную матрицу размера С помощью элементарных преобразований над строками матрицы Г сначала приведем ее к ступенчатому виду где матрица — треугольная, а затем к виду Матричные уравнения простейшего вида с неизвестной матрицей записываются следующим образом (4.2) (4.3) (4,4)
По этой ссылке вы найдёте полный курс лекций по высшей математике:
В этих уравнениях — матрицы таких размеров, что все используемые операции умножения возможны, и с обеих сторон от знаков равенства находятся матрицы одинаковых размеров. Если в уравнениях (4.2), (4.3) матрица А невырожденная, то их решения записываются следующим образом: X Если в уравнении (4. 4) матрицы А и С невырождены, то его решение записывается так:
4) матрицы А и С невырождены, то его решение записывается так:
В этих уравнениях А, В, С, X — матрицы таких размеров, что все используемые операции умножения возможны, и с обеих сторон от знаков равенства находятся матрицы одинаковых размеров. Если в уравнениях (4.2), (4.3) матрица А невырожденная, то их решения записываются следующим образом: Если в уравнении (4.4) матрицы А и С невырождены, то его решение записывается так:
Примеры с решением
Пример 1.
Найти (методом присоединенной матрицы) матрицу, обратную к данной:
Найдем det А:
Так как det , то матрица существует.
Возможно вам будут полезны данные страницы:
Найдем алгебраические дополнения ко всем элементам матрицы А:
Пример 2.
Запишем матрицу
Найдем матрицу
Сделаем проверку:
Пример 3.
Найти матрицу, обратную к матрице А
1) Найдем Матрица существует, только если
2) Найдем алгебраические дополнения к элементам матрицы А:
3) Запишем присоединенную матрицу:
Итак, для матрицы 2-го порядка присоединенная матрица находится очень просто — элементы главной диагонали меняются местами, а элементы побочной диагонали умножаются на (-1):
4) Найдем обратную матрицу 7. 1. Типичные задачи Матричные уравнения естественно возникают в задачах, которые изначально выглядят, как «векторные».
1. Типичные задачи Матричные уравнения естественно возникают в задачах, которые изначально выглядят, как «векторные».
Скажем, поиск собственных векторов объединяется одним уравнением (7.1) где — искомая матрица со столбцами в качестве собственных векторов. Другой характерный пример — линейное дифференциальное уравнение
Как известно, общее решение имеет вид где линейно независимые решения как вектор-столбцы, составляют матрицу фундаментальных решений удовлетворяющую матричному дифференциальному уравнению которое выгоднее рассматривать с самого начала вместо
Поиск преобразования X, обеспечивающего подобие матриц, порождает уравнение После умножения слева на X оно переходит в эквивалентное (7.2) в предположении невырожденности X. Очевидно, (7.1) при заданной матрице Л представляет собой частный случай (7.2). Наконец, поиск функции Ляпуновадля линейной системы приводит к уравнению (7.3) относительно матрицы V.
Обозначая неизвестную матрицу V через X и обобщая (7. 3), приходим к уравнению (7.4) которое охватывает в качестве частных случаев все рассмотренные выше случаи, — разумеется, кроме дифференциального. Уравнение (7.4) линейно относительно элементов неизвестной матрицы X, и этим замечанием, казалось бы, можно закончить исследование, сославшись на предыдущее изучение линейных уравнений.
3), приходим к уравнению (7.4) которое охватывает в качестве частных случаев все рассмотренные выше случаи, — разумеется, кроме дифференциального. Уравнение (7.4) линейно относительно элементов неизвестной матрицы X, и этим замечанием, казалось бы, можно закончить исследование, сославшись на предыдущее изучение линейных уравнений.
Но проблема заключается в том, что уравнение (7.4), как линейное, имеет нестандартную форму, опираясь на двухин-дексное описание переменных.
В принципе, нет никакой трудности в том, чтобы перенумеровать переменные вытянув их в строчку. Но при бесхитростной перенумерации содержательная информация о матрицах A, J9, С может разрушиться, что будет означать отсутствие смысловой связи между получаемыми линейными системами и исходными операторами действующими в Для решения таких задач имеется специальный инструмент — кронекерово произведение2) матриц, Если А и В — прямоугольные матрицы размера, соответственно, то
Размер
Свойства легко проверяются.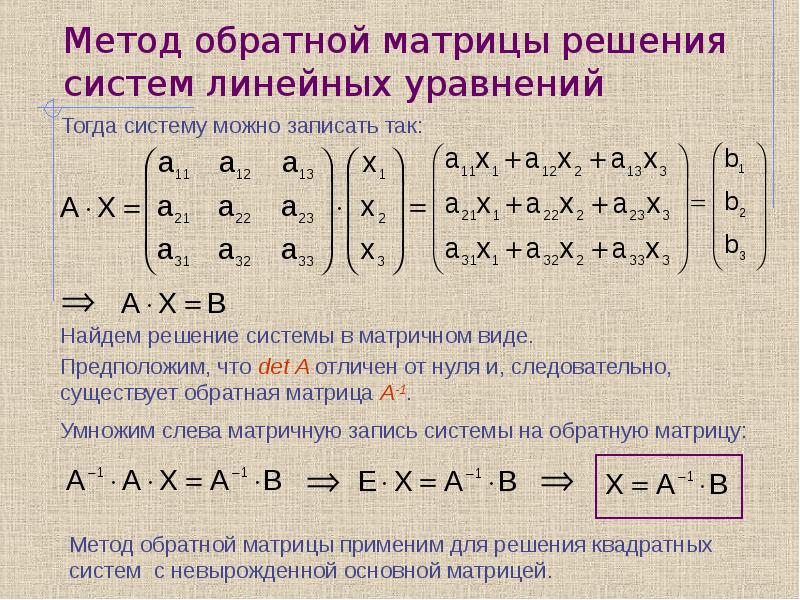
Важную роль играет формула (7.5) Легко проверяется Менее очевидно, что в случае невырожденности квадратных матриц А и В произведение тоже невырожденно) Если теперь допустить кратные собственные значения у А и В, то идея предельного перехода здесь работает без проблем. Собственные векторы в пределе могут становиться линейно зависимыми, но это в данном случае ничему не мешает.
Поэтому утверждение 7.2.1 справедливо без каких бы то ни было предположений о матрицах А и В. Сразу становится ясной отмечавшаяся выше невырожденность в случае невырожденности А и В.
Обычное соотношение может быть записано в виде где вектор это вытянутая в столбик матрица вектор из получен аналогично. Соотношение записывается иначе, Поэтому уравнение (7.4), с помощью кронекерова произведения можно переписать так { (7.7)
В этой перезаписи уравнения не было бы большого смысла, если бы она не позволяла делать выводы в терминах исходных матриц А и В.
Но специфика кронекерова произведения как раз такова, что она дает возможность судить о спектральных свойствах «®-матриц» во многих практических ситуациях. Причиной является следующий факт. Лемма. Если тo Результат сразу вытекает из (7.6),
Причиной является следующий факт. Лемма. Если тo Результат сразу вытекает из (7.6),
Лемма 7.3.1 означает, что матрицы А и В в могут быть приведены к желаемому виду (диагональному, треугольному, жордановому) независимо друг от друга.
Пусть, например. где — соответствующие жордановы формы. Тогда ясно, что спектры и что еше раз доказывает утверждение 7.2.1. Точно так же А и В могут быть приведены к своим жордановым формам) в (7.8) Отсюда ясно, что для невырожденности (7.8) необходимо и достаточно, чтобы не нашлось противоположных собственных значений, Это и является условием однозначной разрешимости уравнения (7.7), т.е. (7.4).
Как теоретический инструмент иногда полезна формула (7.9) дающая решение уравнения в случае, когда матрицы А и В гурвицевы, т.е. действительные части их собственных значений строго отрицательны. Устанавливается это совсем легко. Решением задачи Коши (7.10) является что проверяется подстановкой.
Из гурвицевости А и В следует экспоненциально быстрое убывание до нуля при Это позволяет проинтегрировать (7.
 10) от 0 до оо, что сразу дает (7.9). В частности, решение уравнения в случае гурвицевой матрицы А приводит к положительно определенной функции Ляпунова Найти (методом элементарных преобразований) матрицу, обратную к данной:
10) от 0 до оо, что сразу дает (7.9). В частности, решение уравнения в случае гурвицевой матрицы А приводит к положительно определенной функции Ляпунова Найти (методом элементарных преобразований) матрицу, обратную к данной:Записывая матрицу размера (3 х 6), с помощью элементарных преобразований над строками приведем ее сначала к ступенчатому виду а затем к виду
Итак,
Сделаем проверку:
Матричный калькулятор онлайн
Инструкция матричного онлайн калькулятора
С помощью матричного онлайн калькулятора вы можете сложить, вычитать, умножить, транспонировать матрицы, вычислить обратную матрицу, псевдообратную матрицу, ранг матрицы, определитель матрицы, m-норму и l-норму матрицы, возвести матрицу в степень, умножить матрицу на число, сделать скелетное разложение матрицы, удалить из матрицы линейно зависимые строки или линейно зависимые столбцы, проводить исключение Гаусса, решить матричное уравнение AX=B, сделать LU разложение матрицы, вычислить ядро (нуль пространство) матрицы, сделать ортогонализацию Грамма-Шмидта и ортонормализацию Грамма-Шмидта.
Матричный онлайн калькулятор работает не только с десятичными числами, но и с дробями. Для ввода дроби нужно в исходные матрицы и вводить числа в виде a или a/b, где a и b целые или десятичные числа (b положительное число). Например 12/67, -67.78/7.54, 327.6, -565.
Кнопка в верхем левом углу матрицы открывает меню (Рис.1) для преобразования исходной матрицы (создание единичной матрицы , нулевой матрицы , очищать содержимое ячеек ) и т.д.
Рис.1
При вычислениях пустая ячейка воспринимается как нуль.
Для операций с одной матрицей (т.е. транспонирование, обратное, псевдообратное, скелетное разложение и т.д.) сначала выбирается конкретная матрица с помощью радиокнопки .
Кнопки Fn1, Fn2 и Fn3 переключают разные группы функциий.
Нажимая на вычисленных матрицах открывается меню (Рис.2), что позволяет записать данную матрицу в исходные матрицы и , а также преобразовать на месте элементы матрицы в обыкновенную дробь, смешанную дробь или в десятичное число.
Рис.2
Вычисление суммы, разности, произведения матриц онлайн
Матричным онлайн калькулятором можно вычислить сумму, разность или произведение матриц. Для вычисления суммы или разности матриц, необходимо, чтобы они были одинаковой размерности, а для вычисления произведения матриц, количество столбцов первой матрицы должен быть равным количеству строк второй матрицы.
Для вычисления суммы, разности или произведения матриц:
- Введите размерности матриц и .
- Введите элементы матриц.
- Нажмите на кнопку «A+B «,»A-B» или «A×B».
Вычисление обратной матрицы онлайн
Матричным онлайн калькулятором можно вычислить обратную матрицу. Для того, чтобы существовала обратная матрица, исходная матрица должна быть невырожденной квадратной матрицей.
Для вычисления обратной матрицы:
- Выберите матрицу или с помощью радиокнопки .
- Введите размерность матрицы .
- Введите элементы матрицы.
- Нажмите на кнопку «обратное «.

Для подробного вычисления обратной матрицы по шагам, пользуйтесь этим калькулятором для вычисления обратной матрицы. Теорию вычисления обратной матрицы смотрите здесь.
Вычисление определителя матрицы онлайн
Матричным онлайн калькулятором можно вычислить определитель матрицы. Для того, чтобы существовал определитель матрицы, исходная матрица должна быть невырожденной квадратной матрицей.
Для вычисления определителя матрицы:
- Выберите матрицу или с помощью радиокнопки .
- Введите размерность матрицы .
- Введите элементы матрицы.
- Нажмите на кнопку «определитель «.
Для подробного вычисления определителя матрицы по шагам, пользуйтесь этим калькулятором для вычисления определителя матрицы. Теорию вычисления определителя матрицы смотрите здесь.
Вычисление ранга матрицы онлайн
Матричным онлайн калькулятором можно вычислить ранг матрицы.
Для вычисления ранга матрицы:
- Выберите матрицу или с помощью радиокнопки .
- Введите размерность матрицы .
- Введите элементы матрицы.
- Нажмите на кнопку «ранг «.
Для подробного вычисления ранга матрицы по шагам, пользуйтесь этим калькулятором для вычисления ранга матрицы. Теорию вычисления ранга матрицы смотрите здесь.
Вычисление псевдообратной матрицы онлайн
Матричным онлайн калькулятором можно вычислить псевдообратную матрицу. Псевдообратная к данной матрице всегда существует.
Для вычисления псевдообратной матрицы:
- Выберите матрицу или с помощью радиокнопки .
- Введите размерность матрицы.
- Введите элементы матрицы.
- Нажмите на кнопку «псевдообратное «.
Удаление линейно зависимых строк или столбцов матрицы онлайн
Матричным онлайн калькулятор позволяет удалить из матрицы линейно зависимые строки или столбцы, т.е. создать матрицу полного ранга.
Для удаления линейно зависимых строк или столбцов матрицы:
- Выберите матрицу или с помощью радиокнопки .
- Введите размерность матрицы.
- Введите элементы матрицы.
- Нажмите на кнопку «полный ранг строк » или «полный ранг столбцов».

Скелетное разложение матрицы онлайн
Для проведения скелетного разложения матрицы онлайн
- Выберите матрицу или с помощью радиокнопки .
- Введите размерность матрицы.
- Введите элементы матрицы.
- Нажмите на кнопку «скелетное разложение «.
Решение матричного уравнения или системы линейных уравнений AX=B онлайн
Матричным онлайн калькулятором можно решить матричное уравнение AX=B по отношению матрицы X. В частном случае, если матрица B является вектор-столбцом, то X , будет решением системы линейных уравнений AX=B.
Для решения матричного уравнения:
- Введите размерности матриц и .
- Введите элементы матриц.
- Нажмите на кнопку «решение AX=B».
Учтите, что матрицы и должны иметь равное количество строк .
Исключение Гаусса или приведение матрицы к треугольному (ступенчатому) виду онлайн
Матричный онлайн калькулятор проводит исключение Гаусса как для квадратных матриц, так и прямоугольных матриц любого ранга. Сначала проводится обычный метод Гаусса. Если на каком то этапе ведущий элемент равен нулю, то выбирается другой вариант исключения Гаусса с выбором наибольшего ведущего элемента в столбце.
Для исключения Гаусса или приведения матрицы к треугольному виду
- Выберите матрицу или с помощью радиокнопки .
- Задайте размерность матрицы.
- Введите элементы матрицы.
- Нажмите на кнопку «Треугольный вид».
LU-разложение или LUP-разложение матрицы онлайн
Данный матричный калькулятор позволяет проводить LU-разложение матрицы (A=LU) или LUP-разложение матрицы (PA=LU), где L нижняя треугольная матрица, U-верхняя треугольная (трапециевидная) матрица, P- матрица перестановок. Сначала программа проводит LU разложение, т. е. такое разложение , при котором P=E, где E-единичная матрица (т.е. PA=EA=A). Если это невозможно, то проводится LUP-разложение. Матрица A может быть как квадратной, так и прямоугольной матрицей любого ранга.
е. такое разложение , при котором P=E, где E-единичная матрица (т.е. PA=EA=A). Если это невозможно, то проводится LUP-разложение. Матрица A может быть как квадратной, так и прямоугольной матрицей любого ранга.
Для LU(LUP)-разложения:
- Выберите матрицу или с помощью радиокнопки .
- Задайте размерность матрицы.
- Введите элементы матрицы.
- Нажмите на кнопку «LU-разложение».
Построение ядра (нуль-пространства) матрицы онлайн
С помощью матричного калькулятора можно построить нуль-пространство (ядро) матрицы.
Для построения нуль-пространства (ядра) матрицы:
- Выберите матрицу или с помощью радиокнопки .
- Задайте размерность матрицы.
- Введите элементы матрицы.
- Нажмите на кнопку «ядро (·)».
Ортогонализация Грамма-Шмидта и Ортонормализация Грамма-Шмидта онлайн
С помощью матричного калькулятора можно сделать ортогонализацию и ортонормализацию Грамма-Шмидта матрицы онлайн.
Для ортогонализации или ортонормализации матрицы:
- Выберите матрицу или с помощью радиокнопки .
- Задайте размерность матрицы.
- Введите элементы матрицы.
- Нажмите на кнопку «Ортогонализация Г.-Ш. (·)» или «Ортонормализация Г.-Ш. (·)».
Матричные уравнения — СтудИзба
Матричные уравнения
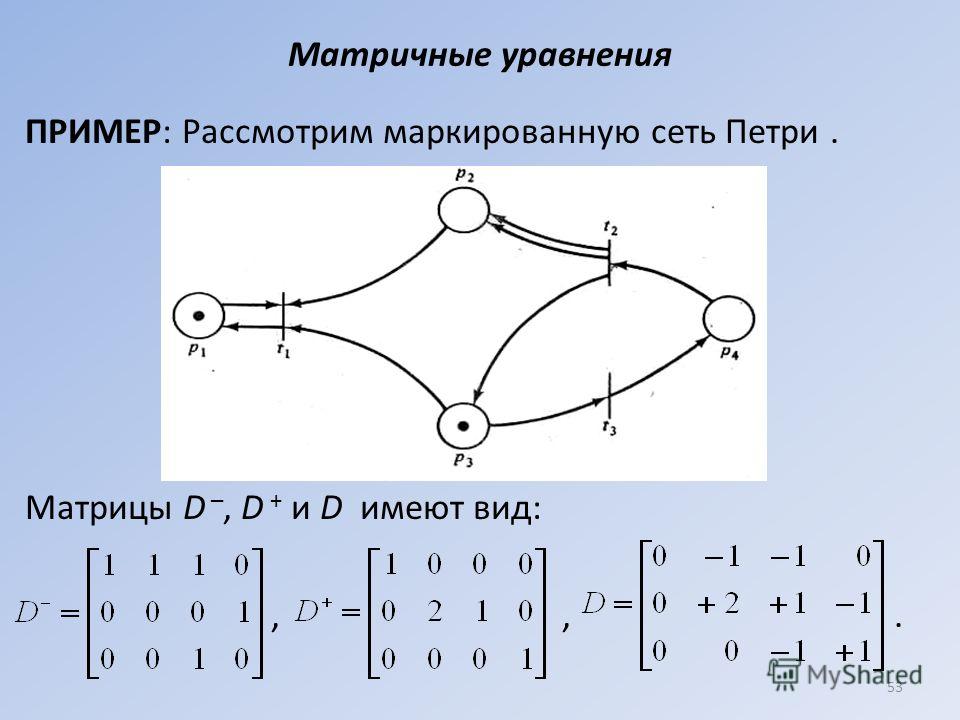
Второй подход к анализу сетей Петри основан на матричном представлении сетей Петри. Альтернативным по отношению к определению сети Петри в виде (Р, Т, I, O) является определение двух матриц D— и D+, представляющих входную и выходную функции. Каждая матрица имеет m строк (по одной на переход) и n столбцов (по одному на позицию). Определим D—[j, i] = #(pi, I(tj)), a D+[j, i] = #(pi, O(tj)). D— определяет входы в переходы, D+ – выходы.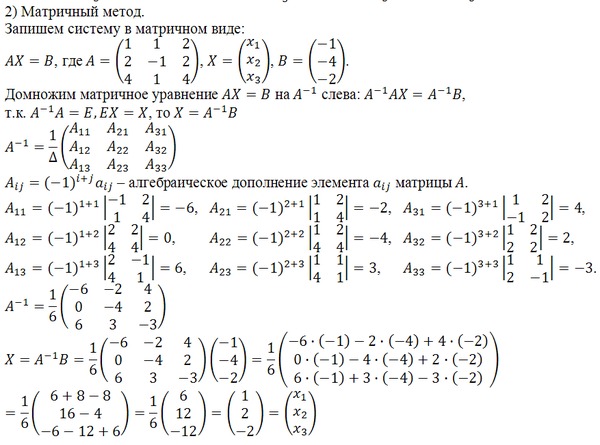
Матричная форма определения сети Петри (Р, Т, D—, D+) эквивалентна стандартной форме, используемой нами, но позволяет дать определения в терминах векторов и матриц. Пусть е[j] – m-вектор, содержащий нули везде, за исключением j-ой компоненты. Переход tj представляется m-вектором e[j][1].
Теперь переход tj в маркировке m разрешен, если m. ³ е[j], а результат запуска перехода tj в маркировке m. записывается как
,
где D = D+ – D+ – составная матрица изменений.
Тогда для последовательности запусков переходов имеем
Рекомендуемые файлы
Вектор f(s) = e[j1] + е[j2] + … + e[jk] называется вектором запусков последовательности . i–й элемент вектора f(s), f(s)i – это число запусков перехода ti в последовательности. Вектор запусков, следовательно, является вектором с неотрицательными целыми компонентами.
i–й элемент вектора f(s), f(s)i – это число запусков перехода ti в последовательности. Вектор запусков, следовательно, является вектором с неотрицательными целыми компонентами.
Для того чтобы показать полезность такого матричного подхода к сетям Петри, рассмотрим, например, задачу сохранения: является ли данная маркированная сеть Петри сохраняющей? Для того чтобы показать сохранение, необходимо найти (ненулевой) вектор взвешивания, для которого взвешенная сумма по всем достижимым маркировкам постоянна. Пусть w—n´1 – вектор-столбец. Тогда, если m – начальная маркировка, а m’ – произвольная достижимая маркировка, необходимо, чтобы . Теперь, поскольку m’ достижима, существует последовательность запусков переходов s, которая переводит сеть из m в m’. Поэтому
.
Следовательно, , поэтому .
Поскольку это должно быть верно для всех f(s), имеем . Таким образом, сеть Петри является сохраняющей тогда и только тогда, когда существует такой положительный вектор w, что . Это обеспечивает простой алгоритм проверки сохранения, а также позволяет получать вектор взвешивания w.
Таким образом, сеть Петри является сохраняющей тогда и только тогда, когда существует такой положительный вектор w, что . Это обеспечивает простой алгоритм проверки сохранения, а также позволяет получать вектор взвешивания w.
Развитая матричная теория сетей Петри является инструментом для решения проблемы достижимости. Предположим, что маркировка m’ достижима из маркировки m. Тогда существует последовательность (возможно, пустая) запусков переходов s, которая приводит из m к m’. Это означает, что f(s) является неотрицательным целым решением следующего матричного уравнения для х:
. (*)
Следовательно, если m’ достижима из m тогда уравнение (*) имеет решение в неотрицательных целых; если уравнение (*) не имеет решения, тогда m’ недостижима из m.
Рис. |
 5.23.
5.23.
Рассмотрим, например, маркированную сеть Петри на рис.5.23. Матрицы D— и D+ имеют вид:
а матрица D:
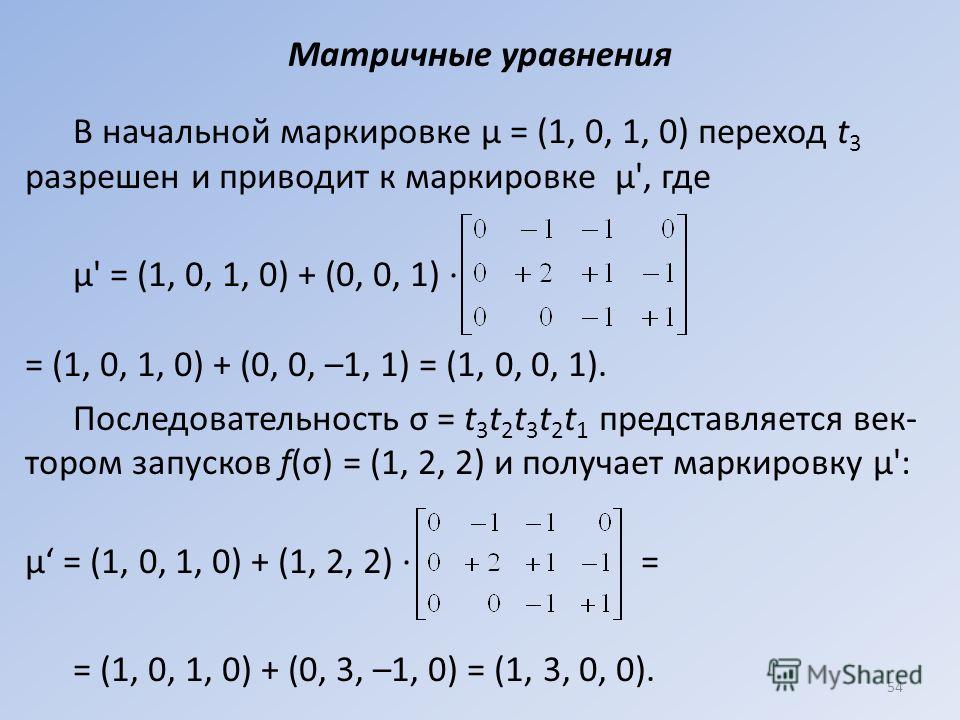
В начальной маркировке m = (1, 0, 1, 0) переход t3 разрешен и приводит к маркировке m’, где
Последовательность представляется вектором запусков f(s)=(1, 2, 2) и получает маркировку m’:
Для определения того, является ли маркировка (1,8,0, 1) достижимой из маркировки (1, 0, 1, 0), имеем уравнение
которое имеет решение x = (0, 4, 5). Это соответствует последовательности s = t3t2t3t2t3t2t3t2t3.
Далее мы можем показать, что маркировка (1,7,0, 1) недостижима из маркировки (1, 0, 1, 0), поскольку матричное уравнение
не имеет решения.
Матричный подход к анализу сетей Петри очень перспективен, но имеет и некоторые трудности. Заметим прежде всего, что матрица D сама по себе не полностью отражает структуру сети Петри. Переходы, имеющие как входы, так и выходы из одной позиции (петли), представляются соответствующими элементами матриц D— и D+, но затем взаимно уничтожаются в матрице D = D— – D+. Это отражено в предыдущем примере позицией p1 и переходом t1.
Рис.5.24. |
Другая проблема – это отсутствие информации о последовательности в векторе запуска. Рассмотрим сеть Петри на рис.5.24. Предположим, мы хотим определить, является ли маркировка (0, 0, 0, 0, 1) достижимой из (1, 0, 0, 0, 0).
Рассмотрим сеть Петри на рис.5.24. Предположим, мы хотим определить, является ли маркировка (0, 0, 0, 0, 1) достижимой из (1, 0, 0, 0, 0).
Тогда имеем уравнение
Это уравнение не имеет однозначного решения, но сводится к множеству решений {s½f(s)=(1, x2, x6-1, 2x6, x6-1, x6)}. Оно определяет взаимосвязь между запусками переходов. Если положим x6=1 и x2=1, то f(s)=(1, 1, 0, 2, 0, 1), но этому вектору запуска соответствуют как последовательность t1t2t4t4t6, так и последовательность t1t4t2t4t6. Следовательно, хотя и известно число запусков переходов, порядок их запуска неизвестен.
Следовательно, хотя и известно число запусков переходов, порядок их запуска неизвестен.
Рис.5.25. |
Еще одна трудность заключается в том, что решение уравнения (*) является необходимым для достижимости, но недостаточным. Рассмотрим простую сеть Петри, приведенную на рис.5.25. Если мы хотим определить, является ли (0, 0, 0, 1) достижимым из (1,0,0,0), необходимо решить уравнение
Вам также может быть полезна лекция «13. Способы борьбы с нефтезагрязнением».
Это уравнение имеет решение f(s) = (1, 1), соответствующее двум последовательностям: t1t2 и t2t1. Но ни одна из этих двух последовательностей переходов невозможна, поскольку в (1,0, 0, 0) ни t1, ни t2 не разрешены.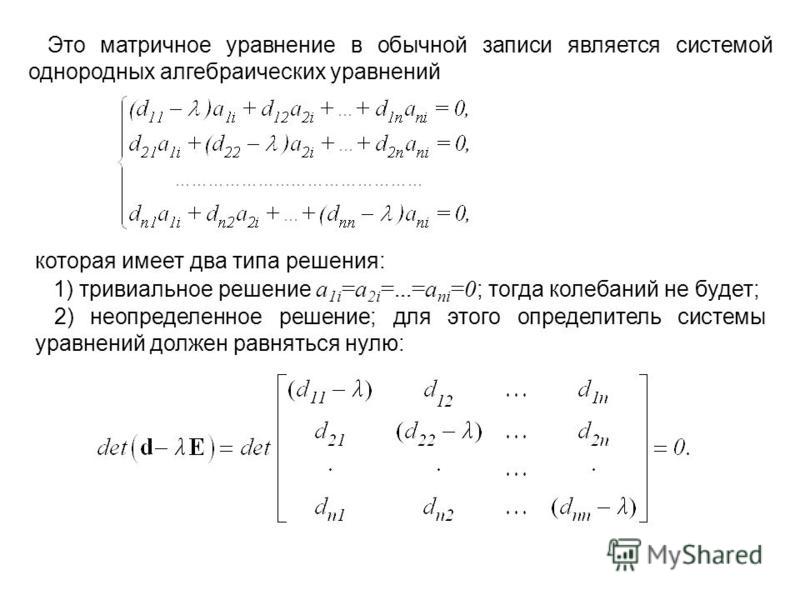 Таким образом, решения уравнения (*) недостаточно для доказательства достижимости.
Таким образом, решения уравнения (*) недостаточно для доказательства достижимости.
Возможность недействительных решений уравнения (*) (решений, которые не соответствуют возможным последовательностям переходов) стала причиной только ограниченного исследования матричного представления сетей Петри.
·
Страница не найдена — ПриМат
© 2012-2016: Нохум-Даниэль Блиндер (11), Анастасия Лозинская (10), Денис Стехун (8), Валентин Малявко (8), Елизавета Савицкая (8), Игорь Любинский (8), Юлия Стерлянко (8), Олег Шпинарев (7), Александр Базан (7), Анна Чалапчий (7), Константин Берков (7), Максим Швандт (6), Людмила Рыбальченко (6), Кирилл Волков (6), Татьяна Корнилова (6), Влад Радзивил (6), Валерия Заверюха (5), Елизавета Снежинская (5), Вадим Покровский (5), Даниил Радковский (5), Влад Недомовный (5), Александр Онищенко (5), Андрей Метасов (5), Денис Базанов (5), Александр Ковальский (5), Александр Земсков (5), Марина Чайковская (5), Екатерина Шибаева (5), Мария Корень (5), Анна Семененко (5), Мария Илларионова (5), Сергей Черкес (5), Алиса Ворохта (5), Артём Романча (4), Анна Шохина (4), Иван Киреев (4), Никита Савко (4), Кондрат Воронов (4), Алина Зозуля (4), Иван Чеповский (4), Артем Рогулин (4), Игорь Чернега (4), Даниил Кубаренко (4), Ольга Денисова (4), Татьяна Осипенко (4), Яков Юсипенко (4), Ольга Слободянюк (4), Руслан Авсенин (4), Екатерина Фесенко (4), Дмитрий Заславский (4), Алина Малыхина (4), Андрей Лисовой (4), Полина Сорокина (4), Кирилл Демиденко (4), Дмитрий Стеценко (4), Александр Рапчинский (4), Святослав Волков (4), Иван Мясоедов (4), Владислав Стасюк (4), Алёна Гирняк (4), Николай Царев (4), Валентин Цушко (4), Павел Жуков (4), Роман Бронфен-Бова (4), Дмитрий Дудник (3), Дарья Кваша (3), Игорь Стеблинский (3), Артем Чернобровкин (3), Виктор Булгаков (3), Дмитрий Мороз (3), Богдан Павлов (3), Игорь Вустянюк (3), Андрей Яроцкий (3), Лаура Казарян (3), Екатерина Мальчик (3), Анатолий Осецимский (3), Иван Дуков (3), Дмитрий Робакидзе (3), Вячеслав Зелинский (3), Данила Савчак (3), Дмитрий Воротов (3), Стефания Амамджян (3), Валерия Сиренко (3), Георгий Мартынюк (3), Виктор Иванов (3), Вячеслав Иванов (3), Валерия Ларикова (3), Евгений Радчин (3), Андрей Бойко (3), Милан Карагяур (3), Александр Димитриев (3), Иван Василевский (3), Руслан Масальский (3), Даниил Кулык (3), Стас Коциевский (3), Елизавета Севастьянова (3), Павел Бакалин (3), Антон Локтев (3), Андрей-Святозар Чернецкий (3), Николь Метри (3), Евелина Алексютенко (3), Константин Грешилов (3), Марина Кривошеева (3), Денис Куленюк (3), Константин Мысов (3), Мария Карьева (3), Константин Григорян (3), Колаев Демьян (3), Станислав Бондаренко (3), Ильдар Сабиров (3), Владимир Дроздин (3), Кирилл Сплошнов (3), Карина Миловская (3), Дмитрий Козачков (3), Мария Жаркая (3), Алёна Янишевская (3), Александра Рябова (3), Дмитрий Байков (3), Павел Загинайло (3), Томас Пасенченко (3), Виктория Крачилова (3), Таисия Ткачева (3), Владислав Бебик (3), Илья Бровко (3), Максим Носов (3), Филип Марченко (3), Катя Романцова (3), Илья Черноморец (3), Евгений Фищук (3), Анна Цивинская (3), Михаил Бутник (3), Станислав Чмиленко (3), Катя Писова (3), Юлиана Боурош (2), Никита Семерня (2), Владимир Захаренко (2), Дмитрий Лозинский (2), Яна Колчинская (2), Юрий Олейник (2), Кирилл Бондаренко (2), Елена Шихова (2), Татьяна Таран (2), Наталья Федина (2), Настя Кондратюк (2), Никита Гербали (2), Сергей Запорожченко (2), Николай Козиний (2), Георгий Луценко (2), Владислав Гринькив (2), Александр Дяченко (2), Анна Неделева (2), Никита Строгуш (2), Настя Панько (2), Кирилл Веремьев (2), Даниил Мозгунов (2), Андрей Зиновьев (2), Андрей Данилов (2), Даниил Крутоголов (2), Наталия Писаревская (2), Дэвид Ли (2), Александр Коломеец (2), Александра Филистович (2), Евгений Рудницкий (2), Олег Сторожев (2), Евгения Максимова (2), Алексей Пожиленков (2), Юрий Молоканов (2), Даниил Кадочников (2), Александр Колаев (2), Александр Гутовский (2), Павел Мацалышенко (2), Таня Спичак (2), Радомир Сиденко (2), Владислав Шиманский (2), Илья Балицкий (2), Алина Гончарова (2), Владислав Шеванов (2), Андрей Сидоренко (2), Александр Мога (2), Юлия Стоева (2), Александр Розин (2), Надежда Кибакова (2), Майк Евгеньев (2), Евгений Колодин (2), Денис Карташов (2), Александр Довгань (2), Нина Хоробрых (2), Роман Гайдей (2), Антон Джашимов (2), Никита Репнин (2), Инна Литвиненко (2), Яна Юрковская (2), Гасан Мурадов (2), Богдан Подгорный (2), Алексей Никифоров (2), Настя Филипчук (2), Гук Алина (2), Михаил Абабин (2), Дмитрий Калинин (2), Бриткариу Ирина (2),
Использование матриц для решения систем уравнений
Матричные уравнения
Матрицы могут использоваться для компактного написания и работы с системами множественных линейных уравнений.
Цели обучения
Определить, как матрицы могут представлять систему уравнений
Основные выводы
Ключевые моменты
- Если [latex] A [/ latex] является матрицей [latex] m \ times n [/ latex], а [latex] x [/ latex] обозначает вектор-столбец (т. Е.[латекс] n \ умножить на 1 [/ latex] матрицу) [latex] n [/ latex] переменных [latex] x_1, x_2,…, x_n [/ latex], а [latex] b [/ latex] представляет собой [ latex] m \ times 1 [/ latex] вектор-столбец, тогда матричное уравнение будет: [latex] Ax = b [/ latex].
Ключевые термины
- матрица : прямоугольное расположение чисел или членов, имеющее различное применение, например, преобразование координат в геометрии, решение систем линейных уравнений в линейной алгебре и представление графиков в теории графов.
Матрицы можно использовать для компактного написания и работы с системами уравнений.Как мы узнали в предыдущих разделах, матрицами можно манипулировать так же, как и нормальным уравнением. Это очень полезно, когда мы начинаем работать с системами уравнений. Полезно понять, как организовать матрицы для решения этих систем.
Написание системы уравнений с матрицами
Можно решить эту систему, используя метод исключения или замены, но также можно сделать это с помощью матричной операции. Прежде чем приступить к настройке матриц, важно сделать следующее:
- Убедитесь, что все уравнения написаны одинаково, то есть переменные должны быть в одном порядке.
- Убедитесь, что одна часть уравнения — это только переменные и их коэффициенты, а другая часть — просто константы.
Решение системы линейных уравнений с использованием обратной матрицы требует определения двух новых матриц: [latex] X [/ latex] — это матрица, представляющая переменные системы, а [latex] B [/ latex] — матрица, представляющая константы. Используя умножение матриц, мы можем определить систему уравнений с таким же количеством уравнений в качестве переменных, как:
[латекс] \ displaystyle A \ cdot X = B [/ латекс]
Чтобы решить систему линейных уравнений с использованием обратной матрицы, пусть [latex] A [/ latex] будет матрицей коэффициентов, пусть [latex] X [/ latex] будет переменной матрицей, и пусть [latex] B [/ latex ] — постоянная матрица. {- 1} \ right) [/ latex], эта формула решит систему.
Если матрица коэффициентов необратима, система может быть несовместимой и не иметь решения, или быть зависимой и иметь бесконечно много решений.
Матрицы и операции со строками
Две матрицы эквивалентны строкам, если одна может быть заменена другой последовательностью элементарных операций со строкой.
Цели обучения
Объясните, как использовать операции со строками и почему они создают эквивалентные матрицы
Основные выводы
Ключевые моменты
- Элементарная операция со строкой — это любое из следующих действий: переключение строк (перестановка двух строк в матрице), умножение строк (умножение строки матрицы на ненулевую константу) или сложение строк (добавление к одной строке матрицы до некоторого числа, кратного другой строке).
- Если строки матрицы представляют систему линейных уравнений, то пространство строк состоит из всех линейных уравнений, которые могут быть выведены алгебраически из уравнений системы.
Ключевые термины
- пространство строки : Набор всех возможных линейных комбинаций его векторов-строк.
- эквивалент строки : В линейной алгебре, когда одна матрица может быть заменена другой последовательностью элементарных операций со строками.
Элементарные операции со строками (ERO)
В линейной алгебре две матрицы эквивалентны строкам, если одна может быть заменена другой последовательностью элементарных операций со строками.В качестве альтернативы, две матрицы [latex] m \ times n [/ latex] эквивалентны строкам тогда и только тогда, когда они имеют одинаковое пространство строк. Пространство строки матрицы представляет собой набор всех возможных линейных комбинаций ее векторов-строк. Если строки матрицы представляют собой систему линейных уравнений, то пространство строк состоит из всех линейных уравнений, которые могут быть выведены алгебраически из уравнений системы. Две матрицы одинакового размера эквивалентны строкам тогда и только тогда, когда соответствующие однородные системы имеют одинаковый набор решений или, что эквивалентно, матрицы имеют одно и то же нулевое пространство.Поскольку элементарные операции со строками обратимы, эквивалентность строк является отношением эквивалентности. Обычно обозначается тильдой (~).
Операция элементарного ряда — это любой из следующих трех ходов:
- Переключение строк (перестановка): поменять местами две строки матрицы.
- Умножение строк (масштаб): умножение строки матрицы на ненулевую константу.
- Сложение строк (сводная): прибавить к одной строке матрицы несколько значений, кратных другой строке.
Создание эквивалентных матриц с использованием элементарных операций со строками
Поскольку матрица по существу является коэффициентами и константами линейной системы, три операции со строками сохраняют матрицу.Например, замена двух строк просто означает изменение их положения в матрице. Кроме того, при решении системы линейных уравнений методом исключения, умножение строк будет таким же, как умножение всего уравнения на число для получения аддитивных обратных величин, так что переменная сокращается. Наконец, добавление строк аналогично методу исключения, когда для получения переменной выбирается сложение или вычитание одинаковых членов уравнений. Следовательно, операции со строками сохраняют матрицу и могут использоваться как альтернативный метод для решения системы уравнений.
Пример 1: Покажите, что эти две матрицы эквивалентны строкам:
[латекс] \ displaystyle A = \ begin {pmatrix} 1 & -1 & 0 \\ 2 & 1 & 1 \ end {pmatrix} \ quad B = \ begin {pmatrix} 3 & 0 & 1 \\ 0 & 3 & 1 \ end {pmatrix} [/ латекс]
Начните с [latex] A [/ latex], добавьте вторую строку к первой:
[латекс] \ displaystyle A = \ begin {pmatrix} 3 & 0 & 1 \\ 2 & 1 & 1 \ end {pmatrix} [/ latex]
Затем умножьте вторую строку на 3 и вычтите первую строку из второй:
[латекс] \ displaystyle A = \ begin {pmatrix} 3 & 0 & 1 \\ 3 & 3 & 2 \ end {pmatrix} [/ latex]
Наконец, вычтите первую строку из второй:
[латекс] \ displaystyle A = \ begin {pmatrix} 3 & 0 & 1 \\ 0 & 3 & 1 \ end {pmatrix} [/ latex]
Вы можете видеть, что [latex] A = B [/ latex], что мы достигли с помощью серии элементарных операций со строками.
Сокращение строк: решение системы линейных уравнений
В редукторе рядов, линейная система:
[латекс] \ displaystyle x + 3y-2z = 5 \\ 3x + 5y + 6z = 7 \ 2x + 4y + 3z = 8 [/ latex]
Представлен в виде дополненной матрицы:
[латекс] \ displaystyle A = \ begin {pmatrix} 1 & 3 & -2 & 5 \\ 3 & 5 & 6 & 7 \\ 2 & 4 & 3 & 8 \ end {pmatrix} [/ latex]
Затем эта матрица модифицируется с использованием операций с элементарными строками до тех пор, пока не достигнет уменьшенной формы эшелона строк.
Поскольку эти операции обратимы, полученная расширенная матрица всегда представляет собой линейную систему, эквивалентную исходной.
Существует несколько конкретных алгоритмов сокращения строк расширенной матрицы, простейшими из которых являются исключение Гаусса и исключение Гаусса-Жордана. Это вычисление может быть выполнено вручную (с использованием трех типов ERO) или на калькуляторе с помощью матричной функции «rref» (сокращенная форма эшелона строк).
Окончательная матрица представлена в виде сокращенного ряда строк и представляет систему [латекс] x = -15 [/ latex], [latex] y = 8 [/ latex] [latex] z = 2 [/ latex].
[латекс] \ displaystyle A = \ begin {pmatrix} 1 & 0 & 0 & 0 & -15 \\ 0 & 1 & 0 & 8 \\ 0 & 0 & 1 & 2 \ end {pmatrix} [/ latex]
Упрощение матриц с помощью операций со строками
Используя элементарные операции, исключение Гаусса приводит матрицы к форме эшелона строк.
Цели обучения
Используйте элементарные операции со строками, чтобы представить матрицу в упрощенной форме
Основные выводы
Ключевые моменты
- Поскольку элементарные операции со строками сохраняют пространство строк матрицы, пространство строк формы эшелона строк такое же, как и у исходной матрицы.
- Существует три типа операций с элементарными строками: меняют местами две строки, умножают строку на ненулевой скаляр и добавляют к одной строке скалярное значение, кратное другой.
- На практике обычно не рассматривают системы в терминах уравнений, а вместо этого используют расширенную матрицу (которая также подходит для компьютерных манипуляций).
Ключевые термины
- Расширенная матрица : Матрица, полученная путем добавления столбцов двух заданных матриц, обычно с целью выполнения одних и тех же элементарных операций со строками для каждой из данных матриц.
С помощью конечной последовательности элементарных операций со строками, называемой исключением по Гауссу, любую матрицу можно преобразовать в форму эшелона строк. Это преобразование необходимо для решения системы линейных уравнений.
Прежде чем углубляться в детали, следует упомянуть несколько ключевых терминов:
- Расширенная матрица : расширенная матрица — это матрица, полученная путем добавления столбцов двух заданных матриц, обычно с целью выполнения одних и тех же операций с элементарной строкой для каждой из данных матриц.
- Форма верхнего треугольника : Квадратная матрица называется верхней треугольной, если все элементы ниже главной диагонали равны нулю. Треугольная матрица — это нижнетреугольная или верхнетреугольная матрица. Матрица, имеющая одновременно верхний и нижний треугольники, является диагональной матрицей.
- Элементарные операции со строками : Поменять местами строки, добавить строки или умножить строки.
Исключение по Гауссу
- Напишите расширенную матрицу для линейных уравнений.
- Используйте элементарные операции со строками в расширенной матрице [latex] [A | b] [/ latex], чтобы преобразовать [latex] A [/ latex] в форму верхнего треугольника. Если на диагонали находится ноль, переключайте строки, пока на его месте не окажется ненулевое значение.
- Используйте обратную замену, чтобы найти решение.
Пример 1: Решите систему методом исключения Гаусса:
[латекс] \ displaystyle 2x + y-z = 8 \\ -3x-y + 2z = -11 \ -2x + y + 2z = -3 [/ latex]
Запишите расширенную матрицу:
[латекс] \ left [\ begin {array} {rrr | r} 2 & 1 & -1 & 8 \\ -3 & -1 & 2 & -11 \\ -2 & 1 & 2 & -3 \ end {array} \ right] [/ latex]
Используйте элементарные операции со строками, чтобы уменьшить матрицу до уменьшенной формы эшелона строк:
[латекс] \ left [\ begin {array} {rrr | r} 1 & 0 & 0 & 2 \\ 0 & 1 & 0 & 3 \\ 0 & 0 & 1 & -1 \ end {array} \ right ] [/ латекс]
Используя элементарные операции со строками для получения сокращенной формы эшелона строк (‘rref’ в калькуляторе), решение системы отображается в последнем столбце: [latex] x = 2, y = 3, z = -1 [/ latex] .
6. Матрицы и линейные уравнения
М. Борна
Мы хотим решить систему одновременных линейных уравнений с помощью матриц:
a 1 x + b 1 y = c 1
a 2 x + b 2 y = c 2
Если допустим
`A = ((a_1, b_1), (a_2, b_2))`, `\ X = ((x), (y)) \` и `\ C = ((c_1), (c_2))`
, затем AX = C . (Впервые мы увидели это в «Умножении матриц»).
Если теперь умножить каждую сторону
AX = C
слева от
А -1 , имеем:
A -1 AX = А -1 С .
Однако мы знаем, что A -1 A = I , Матрица идентичности.Получаем
IX = A -1 C .
Но IX = X , поэтому решение системы Уравнения даются по:
X = A -1 C
См. Рамку в верхней части Инверсии матрицы для более подробного объяснения того, почему это работает.
Примечание: Мы не можем изменить порядок умножения и использовать CA -1 , потому что умножение матриц не коммутативно.
Пример — решение системы с использованием обратной матрицы
Решите систему, используя матрицы.
— x + 5 y = 4
2 x + 5 y = −2
Всегда проверяйте свои решения!
Ответ
У нас:
`A = ((- 1,5), (2,5)),` `\ X = ((x), (y)) \` и `\ C = ((4), (- 2)) `
Чтобы решить систему, нам понадобится обратное к A , которое мы запишем как A -1 .-1C` `= ((- 0,333,0,333), (0,133,0,067)) ((4), (- 2))` `= ((- 2), (0,4))`
Этот ответ означает, что мы нашли решение «x = -2» и «y = 0,4».
Правильное ли решение?
Проверяем в исходной системе уравнений:
`{: (- x + 5y, = 4), (2x + 5y, = — 2):}`
Подставляя `x = -2` и` y = 0.4`, получаем:
`- (- 2) + 5 × (0,4) = 2 + 2 = 4` [Проверяет ОК]
`2 × (−2) + 5 × (0,4)` `= −4 + 2« = −2` [Проверяет ОК]
Итак, решение исходной системы уравнений —
.`х = -2, \ \ у = 0.4`.
Решение 3 × 3 систем Уравнения
Мы можем распространить вышеуказанный метод на системы любого размера. Мы не можем использовать тот же метод для поиска обратных матриц больше 2 × 2.
Мы будем используйте систему компьютерной алгебры, чтобы найти инверсии больше, чем 2 × 2.
Пример — Система 3 × 3 Уравнения
Решите систему матричными методами.
`{: (x + 2y-z = 6), (3x + 5y-z = 2), (- 2x-y-2z = 4):}`
Я уже упоминал? Хорошая идея — всегда проверять свои решения.-1C`
`= ((5.5, -2.5, -1.5), (- 4,2,1), (- 3.5,1.5,0.5)) ((6), (2), (4))`
`= ((22), (- 16), (- 16))`
Чек:
`22 + 2 (-16) — (-16) = 6` [ОК]
`3 (22) + 5 (-16) — (-16) = 2` [ОК]
`-2 (22) — (16) — 2 (-16) = 4` [ОК]
Итак, решение: x = 22, y = -16 и z = -16.
Пример — Электронное применение системы 3 × 3 Уравнения
Найдите электрические токи, указанные решение матричного уравнения (полученного с использованием закона Кирхгофа) возникающие из этой цепи:
`((I_1 + I_2 + I_3), (- 2I_1 + 3I_2), (- 3I_2 + 6I_3)) = ((0), (24), (0))`
(Вы можете изучить, что на самом деле означает решение для этого примера, в этом апплете трехмерных интерактивных систем уравнений.-1 ((0), (24), (0)) `
Используя систему компьютерной алгебры для выполнения обратного и умножения на постоянную матрицу, мы получаем:
`I_1 = -6 \» A «`
`I_2 = 4 \» A «`
`I_3 = 2 \» A «`
Мы видим, что I 1 имеет отрицательное значение, как и ожидалось на принципиальной схеме.
Упражнение 1
Найдены следующие уравнения в конкретной электрической цепи. Найдите токи с помощью матрицы методы.-1C`
`= ((0,294,0,353,0,294), (0,118, -0,059,0,118), (0,588, -0,294, -0,412)) ((0), (6), (- 3))`
`= ((1,236), (- 0,708), (- 0,528))`
Следовательно
`I_A = 1,236 \» A «`,
`I_B = -0,708 \» A «и
`I_C = -0,528 \» A «`
Упражнение 2
Помните об этой проблеме? Если мы знаем используемые одновременные уравнения, мы сможем решить система с использованием обратных матриц на компьютере.
Уравнения схемы с использованием закона Кирхгофа:
−26 = 72 I 1 — 17 I 3 — 35 Я 4
34 = 122 I 2 — 35 I 3 — 87 Я 7
−4 = 233 I 7 — 87 I 2 -34 I 3 -72 I 6
−13 = 149 I 3 — 17 I 1 -35 I 2 -28 I 5 — 35 I 6 — 34 Я 7
−27 = 105 I 5 — 28 I 3 -43 I 4 -34 I 6
24 = 141 I 6 — 35 I 3 -34 I 5 -72 I 7
5 = 105 I 4 — 35 I 1 — 43 Я 5
Каковы отдельные токи, I 1 до I 7 ?
Пользователи телефона
ПРИМЕЧАНИЕ: Если вы пользуетесь телефоном, вы можете прокрутить любую матрицу шириной на этой странице вправо или влево, чтобы увидеть все выражение. — 1 [(-26), (34), (- 4), (- 13), (- 27), (24), (5)] `
`= [(- 0.-3), (- 0,22243), (- 0,27848), (0,21115), (0,20914)] `
Ответ означает, что токи в этой цепи равны (с точностью до 4 знаков после запятой):
`I_1 = -0,4680 \» A «`
`I_2 = 0,4293 \» A «`
`I_3 = 0,0005 \» A «`
`I_4 = -0,2224 \» A «`
`I_5 = -0,2785 \» A «`
`I_6 = 0,2112 \» A «`
`I_7 = 0.2091 \» A «`
Упражнение 3
Нам нужно 10 л бензина содержащий 2% добавки. У нас есть следующие барабаны:
Бензин без присадок
Бензин с 5% присадкой
Бензин с 6% присадкой
Нам нужно использовать в 4 раза больше чистого бензин в виде 5% присадки к бензину.Сколько нужно каждого?
Всегда проверяйте свои решения!
Ответ
Пусть
x = нет. литров чистого бензина
y = нет. литров 5% бензина
z = нет. литров 6% бензина
Из первого предложения имеем:
`x + y + z = 10`
Второе предложение дает нам:
Мы НЕ получаем присадок из чистого бензина.
Получаем (5% от y ) л добавки из второго барабана.
Получаем (6% от z ) л добавки из третьего барабана.
НАМ НУЖНО 2% из 10 л добавки = 0,2 л = 200 мл.
Так
`0,05y + 0,06z = 0,2`
Умножение на 100 дает:
`5y + 6z = 20`
Второе последнее предложение дает нам:
`x = 4y`
Мы можем записать это как:
`x — 4y = 0`
Это дает нам систему одновременных уравнений:
x + y + z = 10
5 y + 6 z = 20
x — 4 y = 0
Так
`A = ((1,1,1), (0,5,6), (1, -4,0))`, `\ C = ((10), (20), (0))`
Использование Scientific Notebook для обратного:
`((1,1,1), (0,5,6), (1, -4,0)) ^ — 1« = ((0.96, -0,16,0,04), (0,24, -0,04, -0,24), (- 0,2,0,2,0,2)) `
Умножение обратной на матрицу C :
`((0,96, -0,16,0,04), (0,24, -0,04, -0,24), (- 0,2,0,2,0,2)) ((10), (20), (0))` `= ((6,4 ), (1.6), (2)) `
Итак, у нас есть 6,4 л чистого бензина, 1,6 л 5% присадок и 2 л 6% присадок.
Это правильно?
`6.4 + 1.6 + 2 = 10` L [ОК]
`5% xx 1,6 + 6% xx 2 = 200` мл [OK OK]
`4 × 1,6 = 6,4` [ОК]
Упражнение 4
Эта задача статики была представлена ранее в разделе 3: Матрицы.
Из диаграммы получаем следующие уравнения (эти уравнения взяты из теории статики):
Вертикальные силы:
F 1 sin 69,3 ° — F 2 sin 71,1 ° — F 3 sin 56,6 ° + 926 = 0
Горизонтальные силы:
F 1 cos 69,3 ° — F 2 cos 71,1 ° + F 3 cos 56,6 ° = 0
Моменты:
7.80 F 1 sin 69,3 ° — 1,50 F 2 sin 71,1 ° — 5,20 F 3 sin 56,6 ° = 0
С помощью матриц найти силы F 1 , F 2 и F 3 .
Ответ
Запишем первое уравнение так, чтобы постоянный член оказался в правой части:
F 1 sin 69,3 ° — F 2 sin 71,1 ° — F 3 sin 56,6 ° = −926
В матричной форме запишем уравнения как:
‘((грех 69.-1 ((- 926), (0), (0)) `
`= ((425,5), (1079,9), (362,2))`
Так
`F_1 = 425,5 \» N «`
`F_2 = 1079.9 \» N «`
`F_3 = 362,2 \» N «`
Это очень просто и быстро в Scientific Ноутбук, Matlab или любая другая система компьютерной алгебры!
Часть 1: Линейное уравнение двух переменных и матриц | Авниш | Линейная алгебра
Мы начнем с рассмотрения простого линейного уравнения и его представления на графике.
x = 0 — простое линейное уравнение одной переменной (x), на графике оно изображено точкой.
Красная точка на 0,00 представляет точку x = 0Принимая во внимание, что 2x + 3y = 6 — это линейное уравнение двух переменных (x и y), которое может быть отображено в виде линии на графике.
Синяя линия представляет уравнение 2x + 3y = 6На графике с двумя осями (x и y) x = 0 будет представлен в виде линии.
Красная линия — это представление x = 0 на двумерном графике.Все линейные комбинации x и y представляют собой линию, и если мы построим все сразу, они заполнят всю декартову плоскость.
x-2y = 6 → (1)
x-y = 4 → (2)
x + y = 0 → (3)
Эти три уравнения можно назвать системой линейных уравнений. Может быть общее значение x и y, такое, что оно удовлетворяет всем трем уравнениям, и это значение x и y можно найти, построив все это на графике. Точка пересечения этих линий называется решением линейного уравнения.
Для системы линейного уравнения, которую мы предположили, существует одно решение, т.е.
(x, y) = (2, -2)
, потому что все три линии пересекаются в точке (2, -2).
Существует множество методов решения системы линейных уравнений, один из них — метод исключения.
Как следует из названия в методе исключения, мы исключаем одну из переменных, вычитая одно уравнение из другого (или сначала умножая одно уравнение на некоторое число, а затем вычитая из другого уравнения).
Из нашего примера выше:
Шаг 1. Мы исключаем «y» из (1), добавляя (2) к (1)
(x + y) + (xy) = 0 + 4
2x = 4
x = 2 → (4)
Шаг 2: Мы берем значение «x» из (4) и подставляем его в (1)
2 + y = 0
y = -2 → (5)
Из (4) и (5) мы можем сказать, что x + y = 0 и xy = 4 имеют решение (2, -2).Но как насчет (3)? Есть ли у него такое же решение?
Шаг 3: подставьте значение (2, -2) в уравнение (3)
2- (2 × (-2)) = 6
2 — (- 4) = 6
6 = 6
Итак, (2, -2) удовлетворяет уравнению. Следовательно, это решение вышеупомянутой системы линейных уравнений.
Матрица — это расположение элементов в строках и столбцах. Элемент может быть любым (постоянным, числовым, переменным и т. Д.).
Матрица порядка 3×3Обычно матрицы заключаются в «[]».
Порядок матрицы: = Количество строк × Количество столбцов.
Линейное уравнение также может быть представлено в виде матриц, например, система линейных уравнений в (1), (2) и (3) может быть представлена как:
Матрица коэффициентов (1), (2) и ( 3)Это сторона коэффициентов всех уравнений, представленных в виде матрицы. Столбец 1 — это коэффициенты «x», а столбец 2 — коэффициенты «y». Каждая строка представляет собой уравнение.
Матрица констант (1), (2) и (3)Это постоянная часть системы уравнений, представленная в виде матрицы порядка 3 × 1.Обе матрицы могут быть записаны вместе как расширенная матрица, разделенная знаком «|». или пунктирная линия.
Расширенная матрица (1), (2) и (3)Расширенная матрица может быть полезна в будущем при применении алгоритма исключения Гаусса.
Система линейных уравнений в матрицах — MathsTips.com
В математике система линейной системы представляет собой набор из двух или более линейных уравнений, включающих один и тот же набор переменных. Например: 2x — y = 1, 3x + 2y = 12. Это система двух уравнений с двумя переменными, то есть x и y, которая называется двумя линейными уравнениями с двумя неизвестными x и y, а решение линейного уравнения — это значение переменных, при котором выполняются все уравнения.
В матрице каждое уравнение в системе становится строкой, а каждая переменная в системе становится столбцом, переменные отбрасываются, а коэффициенты помещаются в матрицу.
Система двух линейных уравнений относительно двух неизвестных x и y имеет следующий вид:
Пусть,,.
Тогда систему уравнений можно записать в матричной форме как:
= то есть AX = B и X =.
Если R.H.S., а именно B, равно 0, то система однородна, в противном случае — неоднородна.
представляет собой однородную систему двух уравнений с двумя неизвестными x и y.
— неоднородная система уравнений.
Система трех линейных уравнений относительно трех неизвестных x, y, z имеет следующий вид:
.
Пусть,,.
Тогда систему уравнений можно записать в матричной форме как:
= то есть AX = B и X =.
Алгоритм решения линейного уравнения через матрицу
- Запишите данную систему в виде матричного уравнения как AX = B.
- Найдите определитель матрицы. Если определитель | A | = 0, то не существует, поэтому решение не существует. Напишите «Система несовместима».
- Если определитель существует, найдите матрицу, обратную матрице, т.е.
- Найдите где матрица, обратная величине.
- Решите уравнение матричным методом линейных уравнений с формулой и найдите значения x, y, z.
Пример 1: Решите уравнение: 4x + 7y-9 = 0, 5x-8y + 15 = 0
Решение: Данное уравнение можно записать в матричной форме как:,,
Данную систему можно записать в виде: AX = B, где.
Найдем определитель: | A | = 4 * (- 8) — 5 * 7 = -32-35 = -67 Итак, решение существует.
Минор и сомножитель матрицы A: = -8 = -8, = 5 = -5, = 7 = -7, = 4 = 4.
Матрица сомножителей = и Adj A =
.
= = =
x = и y =
Пример 2: Решите уравнение: 2x + y + 3z = 1, x + z = 2, 2x + y + z = 3
Решение: Данное уравнение можно записать в матричной форме как:,,.
Данную систему можно записать в виде: AX = B, где.
Найдем определитель: | A | = 2 (0-1) — 1 (1-2) + 3 (1-0) = -2 + 1 + 3 = 2. Итак, решение существует.
Минор и сомножитель матрицы A: = -1 = -1, = -1 = 1, = 1 = 1, = -2 = 2, = -4 = -4, = 0 = 0 = 1 = -1, = -1 = -1, = -1 = 1.
и
.
= = = =.
х = 3, у = -2, г = -1.
Упражнение
Решите следующие уравнения:
- 2x + 3y = 9, -x + y = -2.
- х + 3у = -2, 3х + 5у = 4.
- х + у = 1, 3у + 3z = 5, 3z + 3х = 4. — 1 #
Автор: З.С., Г.П., Д.И. спланированное исследование; Z.S., G.P., E.A., A.B., W.W. и D.I. проведенное исследование; З.С., Г.П., Д.И. проанализированные данные; и З.С. и Д. написал газету.
Авторы заявляют об отсутствии конфликта интересов.
Эта статья представляет собой прямое представление PNAS.
Эта статья содержит вспомогательную информацию на сайте www.pnas.org/lookup/suppl/doi:10.1073/pnas.1815682116/-/DCSupplemental.
- Copyright © 2019 Автор (ы).2 [/ latex], их сумма , [latex] \ vec {u} + \ vec {v} [/ latex], это вектор, полученный путем добавления соответствующих записей [latex] \ vec {u} [/ latex ] и [латекс] \ vec {v} [/ latex], то есть [латекс] \ vec {u} + \ vec {v} = \ begin {bmatrix} u_ {1} + v_ {1} \\ u_ {2 } + v_ {2} \ end {bmatrix} [/ latex].
5. Дан вектор [латекс] \ vec {u} = \ begin {bmatrix} u_ {1} \\ u_ {2} \ end {bmatrix} [/ latex] и действительное число [latex] c [/ latex ], скалярное кратное [latex] \ vec {u} = \ begin {bmatrix} u_ {1} \\ u_ {2} \ end {bmatrix} [/ latex] by [latex] c [/ latex] является вектор [латекс] c \ vec {u} = \ begin {bmatrix} cu_ {1} \\ cu_ {2} \ end {bmatrix} [/ latex], полученный путем умножения каждой записи в [latex] \ vec {u} [ / латекс] от [латекс] c [/ латекс].n [/ latex] — матрицы столбцов [latex] n \ times 1 [/ latex] с элементами [latex] n [/ latex], где [latex] n [/ latex] — положительное целое число. Мы пишем [латекс] \ vec {u} = \ begin {bmatrix} u_ {1} \\ u_ {2} \\\ vdots \\ u_ {n-1} \\ u_ {n} \ end {bmatrix} [ / латекс]
2. Вектор, все элементы которого равны нулю, называется нулевым вектором и равен
.
и обозначается [latex] \ vec {0} [/ latex]Определение: Если [latex] \ vec {v} _ {1}, \ cdots, \ vec {v} _ {p} [/ latex] являются векторами в [латексе] \ mathbb {R} ^ n [/ latex] , и если [latex] a_ {1}, \ cdots, a_ {p} [/ latex] являются константами, то [latex] a_ {1} \ vec {v} _ {1} + \ cdots + a_ {p} \ vec {v} _ {p} [/ latex] — это линейная комбинация векторов [latex] \ vec {v} _ {1}, \ cdots, \ vec {v} _ {p} [/ latex]
Факты / Свойства:
1.[латекс] \ vec {u} + \ vec {v} = \ vec {v} + \ vec {u} [/ латекс]
2. [латекс] (\ vec {u} + \ vec {v}) + \ vec {w} = \ vec {u} + (\ vec {v} + \ vec {w}) [/ латекс]
3. [латекс] \ vec {u} + \ vec {0} = \ vec {0} + \ vec {u} = \ vec {u} [/ латекс]
4. [латекс] \ vec {u} + (- \ vec {u}) = — \ vec {u} + \ vec {u} = \ vec {0} [/ latex]
5. [латекс] c (\ vec {u} + \ vec {v}) = c \ vec {u} + c \ vec {v} [/ латекс]
6. [латекс] (c + d) \ vec {u} = c \ vec {u} + d \ vec {u} [/ латекс]
7.[латекс] (c (d \ vec {u})) = (cd) (\ vec {u}) [/ латекс]
8. [латекс] 1 \ cdot \ vec {u} = \ vec {u} [/ латекс]
Пример 1 : Определите, может ли [latex] \ vec {y} = \ begin {bmatrix} 2 \\ — 2 \\ 4 \ end {bmatrix} [/ latex] быть записано как линейная комбинация [latex] \ vec {v_ {1}} = \ begin {bmatrix} -1 \\ 3 \\ 0 \ end {bmatrix} [/ latex] и [latex] \ vec {v_ {2}} = \ begin {bmatrix} 2 \\ — 5 \\ 1 \ end {bmatrix} [/ latex].
Упражнение 1 : Определите, можно ли [latex] \ vec {y} = \ begin {bmatrix} 1 \\ 3 \\ — 4 \ end {bmatrix} [/ latex] записать как линейную комбинацию [latex] \ vec {v_ {1}} = \ begin {bmatrix} 1 \\ 2 \\ — 1 \ end {bmatrix} [/ latex] и [latex] \ vec {v_ {2}} = \ begin {bmatrix} 3 \\ — 1 \\ 4 \ end {bmatrix} [/ латекс].
Определение: Однородное линейное уравнение — это уравнение, постоянный член которого равен нулю. Система линейных уравнений называется однородной, если каждое уравнение в системе однородно. Однородная система имеет вид:
$$ \ begin {array} {cccc}
a_ {11} x_ {1} + a_ {12} x_ {2} + \ cdots + a_ {1n} x_ {n} = 0 \\
a_ {21} x_ {1} + a_ {22} x_ {2} + \ cdots + a_ {2n} x_ {n} = 0 \\
\ vdots \\
a_ {m1} x_ {1} + a_ {m2} x_ { 2} + \ cdots + a_ {mn} x_ {n} = 0
\ end {array} $$Примечание. $$ x_ {1} = 0, x_ {2} = 0, \ cdots, x_ {n} = 0 $$ всегда является решением однородной системы уравнений.Мы называем это тривиальным решением.
Нулевое решение обычно называют тривиальным решением.
Теорема: Если однородная система линейных уравнений имеет больше переменных, чем уравнений, то она имеет нетривиальное решение (фактически бесконечно много).
Теорема: Система однородных уравнений имеет нетривиальное решение тогда и только тогда, когда уравнение имеет хотя бы одну свободную переменную.
Пример 2 : Определите, имеет ли следующая однородная система нетривиальное решение.Затем опишите набор решений.
$$ \ begin {array} {ccc}
x_ {1} -3x_ {2} + 2x_ {3} = 0 \\
-2x_ {1} + x_ {2} -3x_ {3} = 0 \\
5x_ {1} + 7x_ {3} = 0
\ end {array} $$Упражнение 2 : Определите, имеет ли следующая однородная система нетривиальное решение. Затем опишите набор решений.
$$ \ begin {array} {ccc}
-2x_ {1} -3x_ {2} + 2x_ {3} = 0 \\
-x_ {1} + 6x_ {2} + 4x_ {3} = 0 \ \
x_ {1} -x_ {2} -2x_ {3} = 0
\ end {array} $$Определение: 1.Уравнение вида [латекс] \ vec {x} = s \ vec {u} [/ latex], где [latex] s [/ latex] находятся в [латексе] \ mathbb {R} [/ latex], называется параметрическое векторное уравнение линии. Уравнение вида [латекс] \ vec {x} = s \ vec {u} + t \ vec {v} [/ latex], где [latex] s, t [/ latex] находятся в [латексе] \ mathbb { R} [/ latex] называется параметрическим векторным уравнением плоскости, когда [latex] \ vec {u} [/ latex] и [latex] \ vec {v} [/ latex] не являются скалярными кратными друг другу.
2. Всякий раз, когда набор решений описывается явно как параметрические векторные уравнения
, мы говорим, что решение имеет параметрическую векторную форму.3 [/ латекс].Примечание: Когда неоднородная линейная система имеет много решений, общее решение может быть записано в параметрической векторной форме как один вектор плюс произвольная линейная комбинация векторов, которые удовлетворяют соответствующей однородной системе.
Примечание. С геометрической точки зрения сложение векторов можно рассматривать как перевод. Мы говорим, что [latex] \ vec {v} [/ latex] переводится [latex] \ vec {p} [/ latex] в [latex] \ vec {v} + \ vec {p} [/ latex]. Кроме того, [latex] \ vec {p} + t \ vec {v} [/ latex] является параметрическим уравнением линии, параллельной вектору [latex] \ vec {v} [/ latex], проходящей через точку, соответствующую [ латекс] \ vec {p} [/ латекс]
Пример 4 : Опишите все решения
$$ \ begin {array} {ccc}
x_ {1} -3x_ {2} + 2x_ {3} = 4 \\
-2x_ {1} + x_ {2} -3x_ {3} = -3 \ \
5x_ {1} + 7x_ {3} = 5
\ end {array} $$Упражнение 4 : Опишите все решения
$$ \ begin {array} {cccc}
-2x_ {1} -3x_ {2} + 2x_ {3} = -10 \\
-x_ {1} + 6x_ {2} + 4x_ {3} = 1 \\
x_ {1} -x_ {2} -2x_ {3} = 3
\ end {array} $$Пример 5 : Опишите все решения
$$ \ begin {array} {ccc}
x_ {1} -3x_ {2} + 2x_ {3} = 8 \\
x_ {1} + 2x_ {2} -2x_ {3} = -3 \\
-5x_ {1} -5x_ {2} + 6x_ {3} = 4
\ end {array} $$Упражнение 5 : Опишите все решения
$$ \ begin {array} {cccc}
x_ {1} -3x_ {2} + 2x_ {3} = -8 \\
-x_ {1} + 8x_ {2} + 8x_ {3} = -7 \\
-x_ {2} -2x_ {3} = 3
\ end {array} $$GroupWork1: Отметьте каждое утверждение как истинное или ложное.Обоснуйте каждый ответ.
а. Однородная система всегда непротиворечива.
г. Система однородных уравнений имеет тривиальное решение тогда и только тогда, когда
уравнение имеет хотя бы одну свободную переменную.г. Уравнение [латекс] \ vec {x} = \ vec {p} + t \ vec {v} [/ latex] описывает линию, проходящую через [латекс] \ vec {v} [/ latex], параллельную [латексу] \ vec {p} [/ латекс]
GroupWork2: Рассмотрим следующие утверждения о системе линейных уравнений
с расширенной матрицей [latex] A [/ latex].В каждом случае либо докажите утверждение, либо приведите пример, который не соответствует действительности.а. Если система однородна, каждое решение тривиально.
г. Если система имеет нетривиальное решение, оно не может быть однородным.
г. Если существует тривиальное решение, система однородна.
г. Если система непротиворечива, она должна быть однородной.
Теперь предположим, что система однородна.
e. Если существует нетривиальное решение, нет тривиального решения.
ф. Если решение существует, существует бесконечно много решений.
г. Если существуют нетривиальные решения, эшелонированная форма матрицы A имеет строку нулей.
ч. Если в форме «строка-эшелон» A есть строка нулей, существует
нетривиальных решений.и. Если к системе применяется операция со строками, новая система также будет однородной на
.GroupWork3: [latex] A [/ latex] — матрица коэффициентов системы уравнений, а
[latex] \ vec {b} [/ latex] — постоянный вектор. (а) имеет ли однородная система уравнений нетривиальное решение
и (б) имеет ли система уравнений хотя бы одно решение
для каждого возможного [латекс] \ vec {b} [/ латекс].(i) [latex] A [/ latex] — это матрица [latex] 3 \ times3 [/ latex] с тремя положениями поворота.
(а)
(б)
(ii) [латекс] A [/ latex] представляет собой матрицу [латекс] 4 \ times4 [/ latex] с тремя положениями поворота.
(а)
(б)
GroupWork4: В каждом случае определите, сколько решений (и сколько параметров
) возможно для однородной системы четырех линейных уравнений
с шестью переменными с расширенной матрицей [латекс] A [/ латекс]. Предположим, что [latex] A [/ latex] имеет ненулевые элементы. Дайте все возможности.(a) ранг [латекс] A = 2 [/ латекс]
(b) ранг [латекс] A = 1 [/ латекс]
(c) [latex] A [/ latex] имеет ряд нулей
(d) Эшелонированная форма [латекса] A [/ latex] имеет ряд нулей.
GroupWork5: Найдите все значения [latex] a [/ latex], для которых система имеет нетривиальные решения, и определите все решения.
$$ \ begin {array} {cccc}
.
x_ {1} -2x_ {2} + x_ {3} = 0 \\
x_ {1} + ax_ {2} -3x_ {3} = 0 \\
-x_ {1} + 6x_ {2} -5x_ {3} = 0
\ end {array} $$
В какой-то момент нам нужно вычислить #abs (bb (A)) # или #det (bb (A)) #, и это также можно использовать для проверки, действительно ли матрица обратима, поэтому я предпочитаю сделать это в первую очередь. ;
# bb (A) = ((16,5), (16,1)) #
Если мы расширим первую строку;
# абс (bb (A)) = (15) (1) — (16) (5) #
# \ \ \ \ \ = 16-80 #
# \ \ \ \ \ = -64 #
Поскольку #abs (bb (A))! = 0 => bb (A) # обратимо, теперь мы вычисляем матрицу миноров, систематически прорабатывая каждый элемент в матрице и «зачеркивая» эту строку и столбцы и образуют определитель остальных элементов следующим образом:
# «несовершеннолетние» (bb (A)) = ((1, 16), (5, 16)) #
Теперь мы сформируем матрицу сомножителей, #cof (A) #, взяв указанную выше матрицу миноров и применив матрицу чередующихся знаков, как в
# ((+, -), (-, +)) #
Где мы меняем знак тех элементов со знаком минус, чтобы получить;
# cof (bbA) = ((1, -16), (-5, 16)) #
Затем мы формируем сопряженную матрицу, транспонируя матрицу сомножителей, #cof (A) #, so;
#adj (A) = cof (A) ^ T #
# \ \ \ \ \ \ \ \ \ \ \ \ = ((1, -16), (-5, 16)) ^ T #
# \ \ \ \ \ \ \ \ \ \ \ = ((1, -5), (-16, 16)) #
И, наконец, мы умножаем на обратную величину определителя, чтобы получить:
#bb (A) ^ — 1 = 1 / abs (bb A) adj (bb A) #
# \ \ \ \ \ \ \ = 1 / (- 64) ((1, -5), (-16 , 16)) #
Итак, мы получаем решение линейных уравнений как:
# bb (ul x) = bb (A) ^ (- 1) bb (ul b) #.(-1) ((211), (183)) = ((11), (7)) #
Создание (B) решения coirerct
Решение матричных уравнений за один шаг с помощью резистивных массивов точек пересечения
Значение
Линейная алгебра используется практически во всех научных и инженерных дисциплинах, например, в физике, статистике, машинном обучении и сигналах обработка. Решение матричных уравнений, таких как линейная система или уравнение с собственным вектором, выполняется путем факторизации матриц или итерационного умножения матриц на обычных компьютерах, что требует больших вычислительных ресурсов.Вычисления в оперативной памяти с аналоговой резистивной памятью продемонстрировали высокую эффективность использования времени и энергии за счет реализации умножения матрицы на вектор за один шаг по закону Ома и закону Кирхгофа. Однако решение матричных уравнений за одну операцию остается открытой проблемой. Здесь мы показываем, что схема обратной связи с перекрестной резистивной памятью может решать алгебраические задачи, такие как системы линейных уравнений, собственные векторы матриц и дифференциальные уравнения, всего за один шаг.
Abstract
Обычные цифровые компьютеры могут выполнять расширенные операции с помощью последовательности элементарных булевых функций из 2 или более битов.В результате сложные задачи, такие как решение линейной системы или решение дифференциального уравнения, требуют большого количества вычислительных шагов и широкого использования модулей памяти для хранения отдельных битов. Для ускорения выполнения таких сложных задач вычисления в памяти с резистивной памятью являются многообещающим средством благодаря хранению аналоговых данных и физическим вычислениям в памяти. Здесь мы показываем, что массив точек пересечения резистивных запоминающих устройств может напрямую решать систему линейных уравнений или находить собственные векторы матрицы.Эти операции выполняются всего за один шаг благодаря физическим вычислениям по законам Ома и Кирхгофа, а также благодаря подключению с отрицательной обратной связью в схеме коммутации. Алгебраические задачи демонстрируются на оборудовании и применяются к классическим вычислительным задачам, таким как ранжирование веб-страниц и решение уравнения Шредингера за один шаг.
Задачи линейной алгебры, такие как решение систем линейных уравнений и вычисление собственных векторов матриц, лежат в основе современных научных вычислений и задач, требующих обработки большого количества данных.Традиционно эти проблемы в форме матричных уравнений решаются матричными факторизациями или итеративными матричными умножениями (1, 2), которые требуют больших вычислительных ресурсов и полиномиальной временной сложности, например, O ( N 3 ), где N размер проблемы. Поскольку традиционные компьютеры все чаще сталкиваются с ограничениями масштабирования технологии комплементарного металл-оксид-полупроводник (КМОП) (3), а также из-за затрат энергии и задержек при перемещении данных между памятью и вычислительными блоками (4), улучшение вычислений производительность с увеличением аппаратных ресурсов становится сложной и неэкономичной.Чтобы обойти эти фундаментальные ограничения, вычисления в памяти недавно стали многообещающим методом для проведения вычислений на месте, то есть внутри блока памяти (5). Одним из примеров являются вычисления в массивах точек пересечения, которые могут ускорить умножение матрицы на вектор (MVM) по закону Ома и закону Кирхгофа с аналоговой и реконфигурируемой резистивной памятью (5⇓⇓ – 8). MVM в памяти был адаптирован для нескольких задач, включая сжатие изображений (5), разреженное кодирование (6) и обучение глубоких нейронных сетей (7, 8).Однако решение матричных уравнений, таких как линейная система Ax = b , за одну операцию остается открытой проблемой. Здесь мы показываем, что схема обратной связи, включающая реконфигурируемую резистивную решетку в точках пересечения, может обеспечить решение алгебраических задач, таких как системы линейных уравнений, собственные векторы матрицы и дифференциальные уравнения, всего за один шаг.
Резистивная память — это двухполюсные элементы, которые могут изменять свою проводимость в ответ на приложенное напряжение (9, 10).Благодаря своему энергонезависимому и реконфигурируемому поведению резистивные запоминающие устройства широко исследовались и разрабатывались для запоминающих устройств (11, 12), логики с отслеживанием состояния (13⇓ – 15), вычислений в памяти (5, 6, 16, 17), и нейроморфные вычислительные приложения (7, 8, 18, 19). Резистивная память включает в себя различные концепции устройств, такие как резистивная коммутационная память (RRAM, ссылки 9–12), память с изменением фазы (PCM, ссылка 20) и магнитная память с передачей вращения по крутящему моменту (21). Реализованные в архитектуре массива точек пересечения, резистивная память может естественным образом ускорить операции с большим объемом данных с улучшенной эффективностью времени / энергии по сравнению с классическими цифровыми вычислениями (5, 6, 17).Также недавно было показано, что итерированные операции MVM с резистивными массивами точек пересечения могут решать системы линейных уравнений в сочетании с цифровыми компьютерами с плавающей запятой (22). Чем выше желаемая точность решения, тем больше итераций требуется для завершения операции. Однако итерация поднимает фундаментальный предел для достижения высокой вычислительной производительности с точки зрения энергии и задержки.
Результаты
Схемы пересечения для решения системы линейных уравнений.
Рис. 1 A показывает предложенную схему обратной связи для решения системы линейных уравнений за один шаг, а аппаратная схема на печатной плате показана в приложении SI , рис. S1. Схема представляет собой матрицу узлов RRAM, каждое из которых состоит из пакета металл-изолятор-металл со слоем HfO 2 между верхним электродом из Ti и нижним электродом из C (15). Устройства показывают переход набора от высокого сопротивления к низкому сопротивлению, когда положительное напряжение выше порогового значения В набора применяется к Ti-электроду, и переход сброса от низкого сопротивления к высокому сопротивлению, когда отрицательное напряжение выше порога V сброс применяется к Ti-электроду.Многоуровневая работа также возможна путем выполнения установленного перехода при переменном максимальном (согласованном) токе I C или выполнения перехода в сброс при переменном максимальном напряжении В stop (23), как показано в приложении SI , Рис. S2. Массив точек пересечения 3 × 3 на рисунке может выполнять MVM с разомкнутым контуром, то есть путем приложения вектора напряжения V к столбцам и измерения вектора тока I в строках без соединений строка-столбец, разрешенных с помощью операционные усилители (ОУ), которые показаны в приложении SI, рис.S3. Измеренные токи дают скалярное произведение I = A · V между приложенными аналоговыми напряжениями и матрицей A значений проводимости RRAM в матрице точек пересечения. Результаты свидетельствуют о небольшой погрешности, обычно менее 8%, в основном из-за нелинейности проводимости в резистивных устройствах с перекрестными точками. Это соответствует предыдущим результатам, в которых точность MVM оказалась удовлетворительной (5), хотя и не соответствовала полностью цифровым операциям с одинарной и двойной точностью.
Рис. 1.Решение систем линейных уравнений с массивом точек пересечения резистивных устройств. ( A ) Схема пересечения для решения линейной системы или инвертирования положительной матрицы. Элементы RRAM (красные цилиндры) расположены в точках пересечения между строками (синие полосы) и столбцами (зеленые полосы). ( Вставка , Справа ) Экспериментальные значения проводимости, отображающие элементы матрицы A . Единицы преобразования между матрицами / векторами с действительным знаком и физическими реализациями были: G 0 = 100 мкс, V 0 = 1 В и I 0 = 100 мкА для проводимости RRAM, входное / выходное напряжение и выходной / входной ток соответственно.Другие случаи также следуют этому соглашению, если не указано иное. ( B ) Схемы для вычисления скалярного произведения I = G · V по закону Ома и для вычисления скалярного деления V = — I / G с помощью TIA. ( C ) Измеренное решение линейной системы с вектором входного тока I = [0,2; 1; 1] I 0 . Экспериментальные выходные напряжения дают решение, очень близкое к аналитическому.( D ) Измеренное решение для линейных систем, а именно выходное напряжение, как функция параметра β , управляющего входным током, задаваемым I = β · [0,2; 1; 1] I 0 с −1 ≤ β ≤ 1. Экспериментальные решения (цветные кружки) сравниваются с аналитическими решениями (цветные линии) системы, что подтверждает точность физического расчета. ( E ) Обратная экспериментальная матрица A −1 , а именно измеренные выходные напряжения в трех последующих экспериментах с входным током I = [1; 0; 0] I 0 , [0; 1; 0] I 0 и [0; 0; 1] I 0 соответственно.Также показано аналитическое решение. ( Вставка ) Матричное произведение AA -1 очень близко к единичной матрице U , таким образом поддерживая экспериментальную инверсию.
Работа MVM является следствием физического закона Ома I = G · В , где G — проводимость устройства, В — приложенное напряжение, а I — измеренный ток ( Рис.1 B , Верх ).С другой стороны, обратная операция V = — I / G может быть получена для заданных I и G , просто нагнетая ток I в заземленном узле резистивного устройства. и измерение потенциала V во втором узле. Это физическое разделение выполняется трансимпедансным усилителем (TIA) на рис. 1 B ( снизу ), где ток вводится в инвертирующий входной узел ОУ, а проводимость обратной связи G соединяет вход и выходные узлы ОА.Дифференциальное входное напряжение В + — В — на ОУ минимизировано высоким коэффициентом усиления ОУ, тем самым устанавливая виртуальную землю ( В — = 0) на инвертирующем входе. node (24, 25) и включение физического разделения. Это составляет основу схемы на рис. 1 A , которая решает систему линейных уравнений, выраженную матричной формулой: Ax = b, [1] где A — невырожденная квадратная матрица, отображаемая со значениями проводимости поперечного -точечные устройства RRAM, b — известный вектор, а x — неизвестный вектор.В этой схеме входные токи I = — b прикладываются к рядам точек пересечения, подключенным к узлам виртуальной земли OA. В результате токи вынуждены автоматически распределяться между резистивными элементами в массиве точек пересечения, чтобы установить выходной потенциал В, , удовлетворяющий A · V + I = 0, [2], что подразумевает В = — A −1 · I = x . Схема, аналогичная показанной на рис. 1 A , ранее была представлена в отчете International Roadmap for Devices and Systems (25) и предложена исх.26, хотя не было продемонстрировано возможности решения линейной системы с помощью экспериментов или моделирования.
Чтобы продемонстрировать концепцию на рис. 1 A , мы измерили выходные напряжения в матрице точек пересечения RRAM 3 × 3 на рис. 1 A , где также показана матрица проводимости. Все матрицы, принятые в экспериментах в этой работе, приведены в приложении SI, таблица S1. Вектор тока [ I 10 ; I 20 ; I 30 ] с I 10 = 20 мкА, I 20 = 100 мкА, и I 30 = 100 мкА, был применен к строкам массива, и результирующий потенциал в столбцах массива, т.е.е., [ V 10 ; В 20 ; V 30 ], было измерено, как показано на фиг. 1 C . Хорошее согласие (с относительными ошибками в пределах 3%) с аналитическим решением поддерживает функциональность цепи обратной связи, показанной на рис. 1 A , для решения матричного уравнения в уравнении. 1 . Схема была дополнительно продемонстрирована путем линейного изменения входных токов в соответствии с I i = β I i 0 , где i = 1, 2 или 3, а β был изменяется равномерно в диапазоне от -1 до 1.Результаты представлены на рис. 1 D , где показаны измеренные выходные напряжения в сравнении с аналитическими решениями x = A -1 b . Ошибка остается ниже 10% для | β | > 0,5 ( SI Приложение , рис. S4). Примечательно, что уравнение. 1 физически решается всего за один шаг благодаря физической MVM в массиве точек пересечения и соединению обратной связи, заставляющему виртуальное заземление в рядах точек пересечения.
Ту же концепцию можно расширить для вычисления инверсии матрицы A , удовлетворяющей AA -1 = U , где U — единичная матрица.Столбец i -й столбец A -1 может быть измерен как выходное напряжение, когда столбец i -й столбец U применяется в качестве входа, таким образом реализуя инверсию матрицы за N шагов. На рис. 1 E показаны измеренные элементы A −1 в сравнении с аналитически решенными элементами обратной матрицы, а относительные ошибки вычислены в приложении SI , рис. S5. Рис. 1 E ( вставка ) показывает, что экспериментальный продукт AA -1 хорошо аппроксимирует U , что дополнительно поддерживает вычисленную инверсию матрицы.
Схема на рис. 1 A по существу является оператором инверсии матрицы, который может использоваться для решения линейных систем и инверсий матриц, в то время как массив точек пересечения без обратной связи является оператором матрицы, который, естественно, может использоваться для выполнить MVM. Поскольку схема инверсии матрицы является системой с отрицательной обратной связью, стабильность выходного напряжения требует, чтобы коэффициент усиления контура ( G контур ) каждого контура обратной связи был отрицательным (27). Анализ показывает, что условие G loop <0 выполняется, когда все знаки диагональных элементов A −1 положительны ( SI Приложение , рис.S6). Следуя этому руководству, была решена система линейных уравнений и инверсия матрицы 5 × 5, при этом матрица была реализована в виде массива дискретных резисторов в точках пересечения. Небольшая относительная погрешность около нескольких процентов в этом идеальном случае с дискретными резисторами свидетельствует о том, что высокая точность может быть достигнута с помощью точных и линейных устройств резистивной памяти ( SI Приложение , Рис. S7).
Решение линейной системы с положительными и отрицательными коэффициентами.
Поскольку в резистивном элементе проводимость может быть только положительной, схема на рис.1 может решать только линейные системы с положительной матрицей коэффициентов. Для решения линейных систем с неположительными коэффициентами должна быть принята схема со смешанной матрицей, показанная на рисунке 2. Здесь матрица A разделена на два массива точек пересечения согласно A = B -C, где B и C оба положительны. На рис.2 A показана реализация массива с двумя точками пересечения, где входной ток I разделен схемой на два компонента I B и I C = I — I B , передаваемый в ряды виртуального заземления B и C , соответственно.Аналоговые инверторы позволяют инвертировать напряжение между столбцами B и C . Исходя из закона Ома и закона тока Кирхгофа, выходное напряжение В OA определяется как B · V + C (−V) + I = 0, [3] или A · V + I = 0, который решает линейную систему уравнения. 1 с I = — b .
Рис. 2.Обращение смешанной матрицы. ( A ) Схема схемы двух точек пересечения для инверсии матриц, где два массива точек пересечения содержат элементы матриц B ( Bottom ) и C ( Top ) с A = B — C .Напряжение в матрице C инвертируется в другой с помощью аналоговых инверторов, в то время как входной ток вводится в линии виртуальной земли и разделяется на две матрицы. ( B ) Измеренные значения матриц A , B и C , с A = B — C . В эксперименте матрица B была реализована в виде массива точек пересечения RRAM, а матрица C была реализована в виде массива точек пересечения дискретных резисторов.( C ) Измеренные значения обратной матрицы A -1 как функция аналитически вычисленных элементов A -1 . Поскольку A −1 является положительной матрицей, ее можно инвертировать с помощью единственного массива точек пересечения, как показано на рисунке 1. ( D ) Значения проводимости для матрицы A −1 , реализованные в элементах RRAM , как функция экспериментальных значений A -1 в C .Чтобы устройства работали в области высокой проводимости, матрица A -1 была реализована с G 0 = 500 мкс для проводимости RRAM. ( E ) Измеренные элементы матрицы ( A −1 ) −1 как функция аналитических расчетов. I 0 = 500 мкА и В 0 = 1 В использовались для входного тока и выходного напряжения соответственно. ( F ) Измеренные элементы матрицы ( A −1 ) −1 как функция с исходной матрицей A , демонстрируя замечательную точность, несмотря на накопленные ошибки по двум последовательным процессам инверсии и устройству -процесс программирования.
Мы экспериментально продемонстрировали инверсию смешанной матрицы 3 × 3 A с двумя матрицами B и C , реализованными в массиве RRAM и массиве резисторов, соответственно. Значения A , B и C показаны на рис. 2 B , а на рис. 2 C показаны измеренные элементы A −1 как функция аналитического результаты, демонстрирующие хорошую точность. Чтобы дополнительно поддержать инверсию физической матрицы, мы инвертировали A -1 , которая является положительной матрицей, с одним массивом точек пересечения.Для этой цели элементы A -1 были сначала отображены как значения проводимости в массиве RRAM с использованием алгоритма программирования и проверки с ошибкой менее 5% (приложение SI , рис. S8). Хотя алгоритм программирования и проверки применялся к отдельному устройству RRAM за раз, массив точек пересечения подходит для параллельного программирования, чтобы значительно сократить время инициализации массива (28, 29). На рис. 2 D показаны измеренные значения проводимости RRAM как функция целевых значений, полученных из экспериментального A -1 на рис.2 С . Инверсия A −1 , то есть ( A −1 ) −1 , была вычислена схемой инверсии матрицы, показанной на рис. 1 A , что дало результаты на рис. E . Вычисленное ( A −1 ) −1 сравнивается с исходной матрицей A на рис.2 F , которая поддерживает хорошую точность двойных инверсий ( A −1 ) -1 = А .Относительные ошибки вышеуказанных операций указаны в приложении SI, рис. S9.
Подобно схеме с одиночной точкой пересечения на фиг. 1 A , условие отрицательной обратной связи применяется к смешанной матрице A . Кроме того, поскольку матрица точек пересечения B непосредственно участвует в обратной связи с обратной связью с OA, матрица B также должна удовлетворять условию G loop <0. В качестве предложения для практических приложений. , эталонная матрица B , удовлетворяющая условию G loop , может быть принята в схеме со смешанной матрицей, в то время как матрица C может быть свободно размещена с помощью массива точек пересечения RRAM с условием C = B — A .Чтобы продемонстрировать общность этой концепции, одномерное стационарное уравнение Фурье для диффузии тепла было решено с помощью схемы с перекрестными точками ( SI Приложение , рис. S10 и S11). При использовании метода конечных разностей дифференциальное уравнение сначала преобразуется в систему линейных уравнений, где характеристическая матрица , A является смешанной трехдиагональной матрицей. Входные токи соответствуют известному термину, а именно рассеиваемой мощности в одномерной структуре.Решение дает профиль температуры вдоль эталонной структуры, которая решает численное уравнение Фурье.
Ключевым параметром для описания устойчивости решения линейной системы является число обусловленности κ матрицы (30). Число обусловленности отражает стабильность решения x при небольших изменениях известного члена b в уравнении. 1 , где чувствительность к возмущениям увеличивается с увеличением числа обусловленности. Чтобы изучить влияние числа обусловленности на решение линейных систем в массивах резистивной памяти, мы смоделировали схемное обращение трех матриц 10 × 10 с увеличением числа обусловленности.Чтобы проверить стабильность решения, случайное изменение 0,1 или -0,1 было добавлено к каждому элементу в члене b уравнения Ax = b , где b — это i -й столбец единичная матрица U , x — это i -й столбец A -1 , и i был перевернут от 1 до 10 для вычисления всей обратной матрицы. Результаты представлены в приложении SI, приложение , рис. S12, что указывает на то, что ошибка вычисления увеличивается с увеличением числа обусловленности матрицы.
Влияние числа обусловленности было также проверено в экспериментах путем выполнения двойного обращения матрицы с большим числом обусловленности ( κ = 16,9) по сравнению с матрицей с κ = 9,5 на рис. Номера условий для всех матриц в эксперименте сведены в SI Приложение , Таблица S1. Как показано в Приложении SI, рис. S13, матрица с большим значением κ успешно инвертируется дважды, хотя ошибки вычислений больше, чем в случае на рис.2 ( SI Приложение , рис. S14). Следует отметить, что рассматриваемые в данной работе матрицы хорошо подготовлены. Для плохо обусловленной матрицы с чрезвычайно высоким числом обусловленности должны потребоваться дополнительные схемы, возможно, включая итерационные алгоритмы уточнения, которые могут поддерживаться обычным цифровым компьютером (22) или реализованы в массиве резистивной памяти (26). Ошибка, вызванная тепловым шумом и дробовым шумом компонентов в схеме пересечения, также увеличивается с увеличением числа условий, хотя и представляет гораздо меньшую проблему ( SI Приложение , рис.S15).
Схемы коммутации для вычисления собственных векторов.
Решение линейной системы в уравнении. 1 можно дополнительно расширить до вычисления собственных векторов посредством физических вычислений в массиве точек пересечения. Уравнение для собственного вектора имеет вид Ax = λx, [4] где A — вещественная квадратная матрица, λ — ее собственное значение, а x — соответствующий собственный вектор. Рис. 3 A показывает схему собственного вектора, состоящую из самоуправляемой цепи обратной связи, где вектор напряжения V , сформированный в столбцах точек пересечения, развивает вектор тока I = A · V , при этом проводимость матрицы точек пересечения, отображающей матрицу A .Выходные токи преобразуются в напряжения с помощью TIA с резисторами обратной связи G λ , отображающими известное собственное значение λ . Затем выходные сигналы TIA инвертируются и возвращаются в столбцы точек пересечения. Комбинируя закон Ома и закон Кирхгофа, получаем — A · V / G λ = — V , следовательно, A · V = G λ V , который удовлетворяет уравнению. 4 . Поскольку физические напряжения и токи могут иметь только действительные значения, схема собственных векторов применяется только к действительным собственным значениям и собственным векторам. Для положительной матрицы, согласно теореме Перрона – Фробениуса (31), наивысшее собственное значение должно быть положительным действительным числом, а его собственный вектор также состоит из положительных действительных чисел. В результате собственный вектор наивысшего собственного значения положительной матрицы всегда может быть решен с помощью перекрестной схемы. Если собственный вектор самого низкого отрицательного собственного значения является действительным, его также можно измерить, удалив аналоговые инверторы в цепи обратной связи ( SI Приложение , рис.S16 A ). Обратите внимание, что схема собственного вектора на рис. 3 A работает автономно, подобно генератору с положительной обратной связью, благодаря активным TIA, устанавливающим вектор напряжения V .
Рис. 3.Расчеты собственного вектора и PageRank. ( A ) Схема пересечения для решения уравнения собственных векторов Ax = λx , где x — собственный вектор, а λ — наивысшее положительное собственное значение положительной матрицы A , указанное в вставка.Чтобы предотвратить нарушение при установке / сбросе проводимости RRAM, выходные напряжения OA были ограничены до ± 0,2 В. ( B ) Измеренные собственные векторы, соответствующие наивысшему положительному собственному значению и самому низкому отрицательному собственному значению, как функция нормированных собственных векторов полученные аналитическими решениями. Наибольшее положительное собственное значение и наименьшее отрицательное собственное значение были сохранены как проводимость обратной связи G λ TIA с проводимостью 940 и 331 мкс соответственно.( C ) Система из четырех веб-страниц с соответствующими ссылками. Стрелка, указывающая со страницы i на страницу j , указывает на ссылку j на странице i , поэтому важность веб-страницы можно определить по количеству стрелок, указывающих на эту страницу. ( D ) Матрица ссылок для системы в C . Сумма элементов в каждом столбце равна 1, а все диагональные элементы равны нулю, поскольку страницы не ссылаются на себя. Единица преобразования была G 0 = 684 мкс для проводимости RRAM, чтобы минимизировать нелинейность RRAM.Наивысшее положительное собственное значение равно 1, что соответствует резисторам обратной связи с проводимостью G 0 . ( E ) Измеренный собственный вектор, представляющий оценки важности четырех страниц, как функция аналитически решенного нормализованного собственного вектора.
Схема собственного вектора на рис. 3 A была экспериментально продемонстрирована для массива точек пересечения RRAM со значениями проводимости G , отображающими матрицу A (рис. 3 A , вставка ) путем вычисления собственные векторы для наивысшего положительного собственного значения ( λ + = 9.41) и наименьшее отрицательное собственное значение ( λ — = −3,31). На рис. 3 B показаны измеренные значения собственных векторов как функции нормированных собственных векторов, полученных с помощью аналитических решений. Пропорциональность между экспериментальными и рассчитанными собственными векторами на рисунке указывает на правильное физическое вычисление собственных векторов.
Хотя ограничение решения самыми высокими / самыми низкими собственными значениями может показаться неудобным, оказывается, что для многих приложений используются только самые высокие положительные или самые низкие отрицательные собственные значения.Например, в алгоритме PageRank (32, 33), который дает оценки важности веб-страниц для их ранжирования, собственный вектор матрицы ссылок вычисляется для наивысшего положительного собственного значения. Последнее всегда равно 1, поскольку матрица связей является стохастической матрицей (33). На Фиг.3 C показан пример четырех страниц с соответствующими ссылками, а на Фиг.3 D показана соответствующая матрица ссылок, которая была реализована как значения проводимости массива точек пересечения RRAM 4 × 4.Используя схему собственного вектора, показанную на рис. 3 A , был решен собственный вектор матрицы ссылок для вычисления оценок важности страниц. Рис. 3 E показывает экспериментальные оценки по сравнению с аналитическими оценками, демонстрируя хорошую точность физического вычисления собственного вектора. Реальный случай PageRank описан в приложении SI, рис. S17.
Анализ схемы собственных векторов на рис.3 A показывает, что G петля в идеале должна быть равна 1 ( SI Приложение , рис.S18), что, однако, никогда не может быть полностью удовлетворено в практических схемах. На практике G λ можно экспериментально выбрать так, чтобы G петля была немного больше 1, что позволяет правильно решить собственный вектор с приемлемой ошибкой. Фактически, хотя выход изначально увеличивается из-за цикла G > 1, нелинейность схемы, возникающая из-за насыщения выхода TIA, уменьшает цикл G до 1.С другой стороны, установка G loop меньше 1 приводит к нулевому выходному напряжению, чего, таким образом, следует избегать. Аналогично Рис. 2 A , решение для собственных векторов может быть расширено до смешанной матрицы A с помощью техники разделения с двумя массивами точек пересечения, соединенными аналоговыми инверторами ( SI Приложение , Рис. S16 B ).
Мы проверили физическое вычисление собственных векторов для решения одномерного не зависящего от времени уравнения Шредингера: HΨ = EΨ, [5] где H — оператор Гамильтона, E — собственное значение энергии, а Ψ — соответствующая собственная функция.Уравнение 5 могут быть численно решены методом конечных разностей, давая задачу о собственных векторах, задаваемую уравнением. 4 , где A — трехдиагональная матрица коэффициентов, x — вектор значений в дискретных позициях, а λ — наивысшее / наименьшее собственное значение. Уравнение Шредингера было решено для квадратной потенциальной ямы, показанной на рис. 4 A , которая была разделена поровну на 32 сегмента ( SI Приложение , рис. S19 и S20).Фиг.4 B показывает трехдиагональную смешанную матрицу A 33 × 33, описывающую уравнения собственных векторов. Матрица A, разделена на две положительные трехдиагональные матрицы B и C , которые отображаются в значения проводимости двух массивов точек пересечения, соответственно. Собственный вектор был рассчитан для основного состояния с энергией E = -4,929 эВ, что соответствует наименьшему отрицательному собственному значению задачи. Собственные значения и собственные векторы, полученные путем численного решения на цифровом компьютере, также указаны в приложении SI , рис.S19. Фиг. 4 C показывает собственный вектор, полученный с помощью схемы смоделированного собственного вектора, в сравнении с аналитически вычисленным собственным вектором. Физически вычисленная волновая функция хорошо согласуется с численным решением, которое дополнительно поддерживает физические вычисления в схемах пересечения точек для реальных приложений.
Рис. 4.Решение уравнения Шредингера в схеме пересечения. ( A ) Прямоугольная яма потенциала V ( x ), принятая в уравнении Шредингера.Потенциальная яма имеет глубину -5 эВ и ширину 2 нм, в то время как решение проводится с общей шириной 3,2 нм, дискретизированной в 32 равных интервалах. ( B ) Матрица A размером 33 × 33, полученная из пространственной дискретизации уравнения Шредингера, и две положительные матрицы B и C , реализованные в массивах точек пересечения, с A = В — С . Единица преобразования 100 мкс для 7,6195 эВ была принята в матрицах B и C .Две матрицы проводимости имеют одну и ту же цветовую полосу. Собственное значение в основном состоянии составляет -4,929 эВ, что отображается на проводимость (65 мкСм) резисторов обратной связи TIA. ( C ) Дискретная собственная функция основного состояния, полученная как смоделированное выходное напряжение в схеме пересечения по сравнению с аналитическими решениями. Обратите внимание, что пиковое напряжение составляет около 1,5 В напряжения питания ОУ из-за насыщения.
Обсуждение
Массивы точек пересечения позволяют решать широкий набор задач алгебры, от линейных систем до задач на собственные векторы, тем самым обеспечивая физическое решение дифференциальных уравнений, описывающих реальные проблемы в промышленности, экономике и здравоохранении.Решение основано на чрезвычайно простых схемных элементах, таких как имеющиеся в продаже OA и современные резистивные запоминающие устройства, такие как RRAM и PCM. Для сравнения, предыдущие решения линейных систем с использованием подхода квантовых вычислений (34, 35) менее привлекательны, поскольку квантовые схемы обычно работают при криогенных температурах и требуют специального оборудования и некоммерческих технологий. Другие предлагаемые решения с архитектурой нейронных сетей (36) или аналоговыми ускорителями на основе КМОП (37) основаны на итерационных операциях, что приводит к полиномиальному времени вычислений и стоимости.Напротив, массив точек пересечения позволяет быстро решить всего за один шаг без итераций. Время вычислений ограничено временем установления ОУ, которое может достигать нескольких наносекунд в передовой КМОП-технологии (38).
Чтобы оправдать ожидания практических приложений, схему коммутации следует масштабировать, чтобы продемонстрировать выполнимость схемы. Чтобы продемонстрировать масштабируемость схемы пересечения, решение системы линейных уравнений для матрицы коэффициентов модели 100 × 100 при моделировании показано в приложении SI , рис.S21. Результаты показывают, что линейная система точно решается схемой, которая поддерживает пригодность схемы коммутации для решения реальных проблем. Поскольку матричные коэффициенты хранятся в реальных наноразмерных устройствах с присущими им стохастическими вариациями, схема пересечения обеспечивает только приблизительное решение линейной задачи. Чтобы оценить влияние вариаций устройства, мы включили случайное отклонение проводимости каждого перекрестного устройства для матрицы 100 × 100 и рассчитали относительные ошибки выходных напряжений ( SI Приложение , рис.S22). Результаты моделирования показывают относительно низкие ошибки (около 10%) даже с отклонением в 10%. Таким образом, высокоточное сохранение значений проводимости с помощью методов программирования и проверки имеет важное значение для повышения точности решения в зависимости от конкретных приложений. Нелинейная проводимость в резистивном элементе, физически возникающая из-за прыжковой проводимости и локального джоулева нагрева, также влияет на точность решения. Линейность проводимости может быть максимизирована за счет увеличения проводимости устройства (5), что, однако, приводит к более высокому потреблению энергии для перенастройки и работы схемы пересечения.Развитие технологии резистивной памяти, направленной на более высокую точность многоуровневого размещения и лучшую линейность проводимости, может улучшить схему пересечения для вычислений линейной алгебры в памяти.
По мере увеличения масштаба схемы коммутации паразитное сопротивление из-за плотной разводки межсоединений в массиве памяти может стать дополнительной проблемой. Чтобы оценить влияние паразитного сопротивления, мы смоделировали ту же линейную систему 100 × 100 из SI Приложение , рис.S21 с дополнительным паразитным сопротивлением провода ( SI Приложение , рис. S23). Для справки параметры межсоединений были взяты из Международной дорожной карты технологий для полупроводников на 65- и 22-нм технологических узлах (39). Относительные ошибки находятся в пределах ∼10 и 30% для узлов 65 и 22 нм соответственно. Эти результаты предполагают, что существует компромисс между масштабированием и точностью схемных решений задач алгебры. Также следует отметить, что ошибки вычислений по существу продиктованы соотношением сопротивлений между сопротивлением устройства и паразитным сопротивлением.В результате точность вычислений может быть улучшена за счет увеличения сопротивления запоминающих устройств, что, в свою очередь, может вызвать проблему нелинейности проводимости, которая также влияет на точность вычислений. Мы пришли к выводу, что существует сложный компромисс между масштабированием, паразитным сопротивлением и нелинейностью устройства для оптимизации операций (40, 41). В этом сценарии трехмерная интеграция памяти точки пересечения, где плотность не обязательно приводит к увеличению сопротивления межсоединений, может повысить устойчивость точности вычислений к паразитному сопротивлению (42).
В то время как отсутствие итераций является очень привлекательной особенностью для быстрых вычислений, время, необходимое для программирования индивидуальных матричных коэффициентов в памяти, также следует учитывать для всесторонней оценки технологии. Хотя время записи в наших устройствах было относительно большим с целью точной настройки значений проводимости (см., Например, приложение SI, приложение , рис. S8), время программирования в реальном приложении могло бы быть значительно ускорено благодаря параллельному программирование (28, 29), схемы аналогового программирования (43), помимо субнаносекундной коммутации устройств RRAM (44) и устройств PCM (45).Кроме того, согласно концепции вычислений в памяти, одни и те же данные могут часто повторно использоваться для вычислений (42), таким образом, время программирования может играть незначительную роль в общем времени вычислений.
Хотя точность нашей схемы нельзя сравнивать с точностью решения с плавающей запятой в высокоточном цифровом компьютере, важно отметить, что требуемая точность может быть не высокой для всех приложений. На самом деле существует много случаев, когда задача линейной алгебры должна быть решена за короткое время, с низким бюджетом энергии и с достаточной устойчивостью к ошибкам.Например, в алгоритмах машинного обучения коэффициенты классификации / распознавания могут рассчитываться с некоторой погрешностью. Сетевые коэффициенты могут быть получены с помощью псевдообратной матрицы (46), вычисление которой может быть ускорено нашим подходом. Другим примером является ранжирование веб-страниц, где вычисленные оценки веб-сайта должны отображаться в правильном порядке, хотя некоторые неточности все же могут допускаться для отдельных оценок. Для аналогичных типов приложений наши схемы могут предоставить решение с отличным компромиссом между точностью, скоростью и потреблением энергии.
В заключение были представлены решения задач линейной алгебры в резистивных массивах точек пересечения. Такие задачи, как системы линейных уравнений, собственные векторы матриц и дифференциальные уравнения, решаются ( i ) за один шаг (и инверсия матрицы за N шагов), ( ii ) in situ в массиве памяти точек пересечения, и ( iii ) через физические законы, такие как закон Ома, закон Кирхгофа и механизмы обратной связи в схемах с обратной связью. Предлагаемые вычисления в памяти прокладывают путь для будущих приблизительных вычислительных систем в памяти для решения практических задач с большими данными с огромной экономией времени и энергии для широкого спектра реальных приложений.
Методы
Подробная информация о производстве и характеристиках устройств, схемах и методах измерения представлена в Приложении SI .
Благодарности
Эта работа получила финансирование от Европейского исследовательского совета в рамках программы исследований и инноваций Европейского Союза Horizon 2020 (Соглашение о гранте 648635). Эта работа была частично выполнена на Polifab, предприятии по микро- и нанотехнологии Миланского политехнического университета.