Найти решение системы линейных уравнений третьего, четвертого порядка матричным методом
Для решения системы линейных алгебраических уравнений ее записывают в матричной форме
где -матрица, составленная из коэффициентов при неизвестных; — столбец неизвестных; — столбец свободных членов. После того, если для матрицы существует обратная матрица ( ) то система линейных уравнений имеет единственное решение и он находится за формулой
Поскольку перемножить матрицу на вектор столбец не складывает особенных трудностей, то большая проблема при вычислениях — найти обратную матрицу
В нахождении решения за приведенной формулой и заключается суть матричного метода.
Рассмотрим несколько примеров из сборника задач Дубовика В.П., Юрика І.І. «Высшая математика»
————————————
Задача.
Решить систему линейных алгебраических уравнений.
1) (1. 183)
2) (4. 182)
Решение.
1) Запишем систему трех линейных уравнений в матричной форме
Найдем обратную матрицу. Напомним, что
где — определитель матрицы , а — транспонированная матрица алгебраических дополнений элементов определителя матрицы.
Вычислим определитель матрицы
Матрица алгебраических дополнений состоит из элементов , которые вычисляются через миноры по правилу
Миноры — это определители на порядок меньшие от определителя , которые образуются вычеркиванием в нем -й строки и — го столбца. На первый взгляд звучит слишком запутано, но при вычислениях все станет понятно и просто.
Найдем алгебраические дополнения к определителю
Запишем найденную матрицу алгебраических дополнений
и протранспонируем ее
Находим обратную матрицу
С помощью обратной матрицы находим решение системы линейных уравнений
На етом решения примера завешено. Как видите никаких сложных вычислений в етом задании мы не делали.
Как видите никаких сложных вычислений в етом задании мы не делали.
2) Запишем систему линейных уравнений четвертого порядка в матричной форме
Поскольку все коэффициенты ненулевые то вычислять ее будет трудно. Выполним над системой линейных уравнений элементарные превращения чтобы превратить в нуль некоторые из коэффициентов.
От второй строки отнимем первую и последнюю строки
От третьей строки отнимем сумму первой и четвертой строки начальной системы
От четвертой строки отнимем первый
Из последней строки уже можем сказать что но будем придерживаться правил чтобы научиться решать большие системы уравнений.
Поскольку матрица стала разреженной то вычисление определителя и матрицы алгебраических дополнений упростятся. Найдем определитель матрицы, разложив его за четвертой строкой
Найдем матрицу алгебраических дополнений, раскладывая искомые детерминанты за строками и столбцами которые содержат больше всего нулей. Для самопроверки выпишу Вам вычисление только первой строки. Остальные попробуйте вычислить самостоятельно
После нахождения всех значений получим следующую матрицу дополнений
Поскольку определитель равен единице то обратная матрица с транспонированной матрицей дополнений совпадают
Подставим в матричную запись и найдем решение
При вычислениях систем линейных алгебраических уравнений третьего, четвертого порядка матричным методом придется находить большое количество алгебраических дополнений , которые собой являют определители второго и третьего порядка соответственно. Именно ошибки при их вычислении чаще всего становятся причиной неверного решения. Для избежания таких ситуаций нужно хорошо знать правила нахождения определителей второго, третьего порядка, а также правила чередования знаков возле миноров.
Изучайте их и получайте лишь верные решения !
———————————————-
Посмотреть материалы:
Численные методы: решение систем линейных уравнений
В прикладных задачах часто возникает необходимость решать системы линейных уравнений.
Система линейных алгебраических уравнений с n неизвестными — это система уравнений вида
(1)
Слово система означает, что все уравнения рассматриваются как одно целое.
В общем случае у нас имеется m — уравнений, n — количество неизвестных. x1, x2,…, xn — неизвестные, которые следует определить.
В системе (1) – фиксированные коэффициенты, b1, b2, …, bm — свободные члены — предполагаются известными.
Система (1) называется однородной, если все её свободные члены равны нулю (b1 = b2 = … = b
Система (1) называется квадратной, если число m уравнений равно числу n неизвестных.
Задача состоит в том, чтобы найти такие которые удовлетворяют всем уравнениям (1).
В частном случае мы имеем одно линейное уравнение:
Конечно, такое уравнение легко решить, если предположить, что коэффициент не равен 0, имеем: = .
Очевидно, в общем случае имеются 3 варианта решений: система имеет ни одного решения, имеет одно решение, более одного решения.
Система (1) называется совместной, если она имеет хотя бы одно решение, и несовместной, если нет ни одного решения.
Система линейных уравнений может быть представлена в матричной форме как:
или:
Ax = b
Здесь A — это матрица системы, x — столбец неизвестных, а b — столбец свободных членов.
Если к матрице A приписать справа столбец свободных членов, то получившаяся матрица называется расширенной.
Рассмотрим, например, систему вида и поймем, как найти ее решение:
(2)
Предположим на минуту, что в первом уравнении y отсутствует, а во втором отсутствует x, тогда мы имели бы решение именно то решение, которое нам нужно.
Вопрос: как исходную систему привести к такому виду и можно ли это сделать.
Заметим, что с тождествами мы можем делать следующие вещи: домножать на одно и то же число, отличное от 0, складывать, вычитать и тд, это похоже с тем, что вы раскладываете монеты по своим карманам, не меняя общей суммы.
От этих операций тождество не меняется.
В системе (2) у нас два тождества, домножим второе тождество на 2 и вычтем из первого, получим:
(3)
Формально у нас есть еще старое тождество , но оно нам не понадобится (подумайте, почему).
Система (3) точно такая же, как система (2).
Из второго уравнения системы (3) сразу получим:
Никто не мешает нам подставить это значение в первое уравнение:
Отсюда сразу находим, что
Итак, путем простых действий мы нашли, что система (2) может быть представлена в виде:
Именно такие естественные соображения приводят к общему методу решения систем линейных уравнений, известному как метод исключения или метод Гаусса.
Метод Гаусса является одним из самых распространенных прямых методов решения систем линейных уравнений Ax = b:
Опишем этот метод в общем случае.
Вначале исходная система приводится к верхнетреугольному виду.Это достигается следующей последовательностью преобразований (прямой ход).
Будем считать для удобства, что элемент aij исходной матрицы и компоненты вектора bi есть, соответственно, элементы aij (1) первого шага преобразованной матрицы A1 и преобразованного вектора b1:A = A1, b=b1.
Далее, на втором шаге прибавим к второй строке первую, умноженную на
Аналогично поступим со всеми оставшимися строками, т.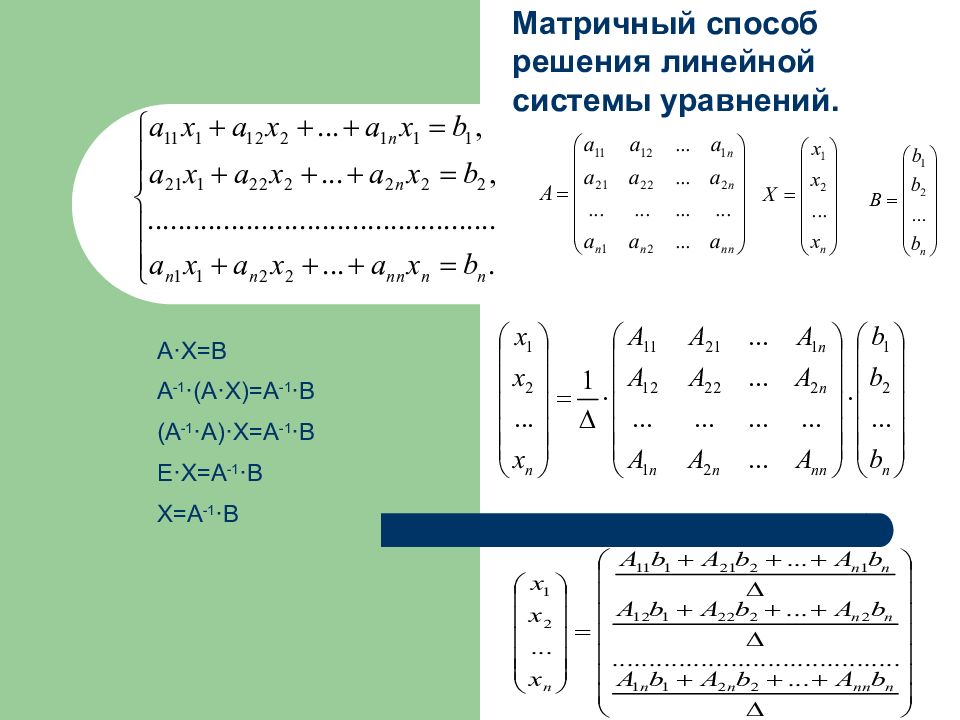 е. прибавим к каждой i-ой строке i=2,3,…,N, первую, умноженную на коэффициент
е. прибавим к каждой i-ой строке i=2,3,…,N, первую, умноженную на коэффициент
При этом соответственно изменится и вектор b1.
Таким образом, 2 шаг.
Имеем систему уравнений A2x = b2:
где
3 шаг.
Прибавим к новой третьей строке новую вторую, умноженную на
То же самое сделаем с остальными строками 4,5,…,N, т.е. прибавим к i-ой строке вторую, умноженную на
При этом получим систему A3x = b3:
(k+1)-ый шаг:
Здесь
Поступая так и далее, на шаге N-1 получаем верхнетреугольную систему:
При этом, мы также получили матрицу C переводных коэффициентов, имеющую вид:
Решение полученной треугольной системы как легко видеть, имеет вид (обратный ход метода Гаусса):
Заметим, что при прямом ходе метода Гаусса может возникнуть ситуация, когда происходит деление на нуль, да и вообще, желательно не делить на малое число, чтобы не накапливалась ошибка.
Поэтому метод Гаусса обычно проводят с частичным выбором главного элемента, то есть после каждого шага (пусть это был k-й шаг) переставляют строки с номерами k,k+1,…,N таким образом, чтобы на месте kk оказался элемент наибольший из всех в k-ом столбце при m>k (при этом, естественно, переставляются и компоненты вектора b).
Можно для максимальной точности переставлять также и столбцы преобразуемой матрицы, чтобы на месте kk оказался максимальный элемент из всех с индексами больше, либо равными k.
Эта процедура называется методом Гаусса с выбором главного элемента. Она несколько повышает точность по сравнению с частичным выбором главного элемента, но весьма неудобна, в том числе для программирования, поскольку при перестановке строк компоненты искомого вектора x переставлять не надо, тогда как при перестановке столбцов надо переставлять и соответствующие компоненты вектора 
Опишем обратный ход метода Гаусса в несколько иной форме (треугольное разложение).
Введем матрицы Mk по правилу:
На каждом шаге метода Гаусса получается некоторая промежуточная матрица:
и вектор
Нетрудно видеть, что
Вопрос. Почему
Если производить также выбор главных элементов, то необходимо использовать оператор P перестановки индексов l и m, матричные элементы которого равны:
При применении оператора перестановки индексов к матрице слева, меняются местами строки матрицы и компоненты свободного вектора (PAx = Pb), если же его применить справа к матрице, то меняются местами ее столбцы и компоненты решения
Существует большой класс так называемых итерационных методов решения систем уравнений, аналогичных итерационным методам нахождения корней нелинейных уравнений.
Итерационные методы последовательно уточняют решение, отправляясь от начального приближения.
При выполнении условий сходимости они позволяют достичь любой точности просто повторением итераций.
Преимущество этих методов в том, что часто они позволяют достичь решения с заранее заданной точностью быстрее, а также позволяют решать большие системы уравнений.
Идея состоит в том, чтобы найти неподвижную точку матричного уравнения
(5)
эквивалентного начальной системе линейных алгебраических уравнений.
При итерации в правой части уравнения заменяется, например, в методе Якоби (метод простой итерации) приближение, найденное на предыдущем шаге:
.
Термин неподвижная точка
Более подробное описание методов решения систем линейных уравнений можно найти в специальной литературе, наша задача дать обзор методов и основные идеи решения такого рода задач.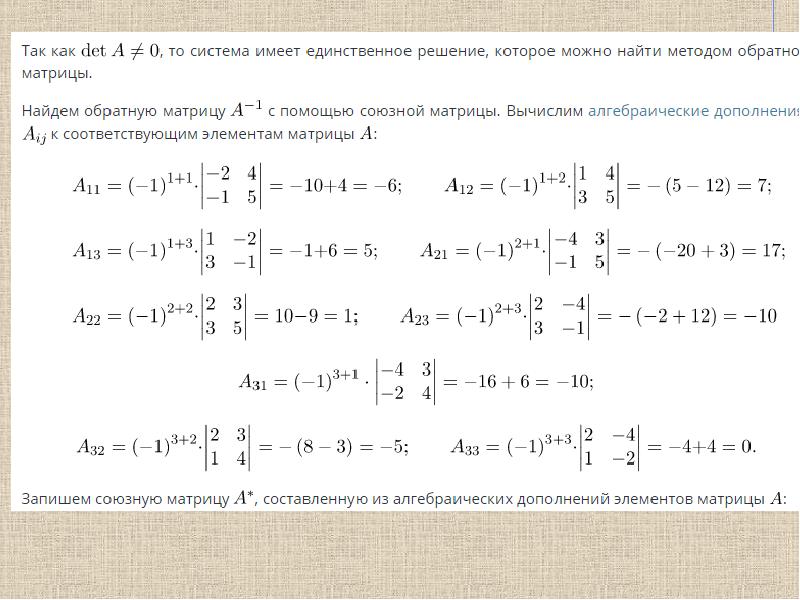
Обусловленность линейных систем, погрешность
При решении абстрактной задачи Ax = b, где A — оператор произвольной природы, важным моментом является корректность ее постановки.
Задача считается корректной, если решение существует и единственно и , кроме того, решение непрерывно зависит от данных (то есть, при также стремится к нулю).
Однако и непрерывная зависимость от входных данных может иметь свои нюансы.
Чем меньшее (большее) изменение решения вызывает вариация входных данных, тем более хорошо (плохо) обусловленной считается задача.
Понятие обусловленности является тем более существенным для численных методов, поскольку на практике входные данные известны, как правило, с некоторой погрешностью.
Кроме того, существуют ошибки округления, возникающие при вычислениях.
Таким образом, формально корректная задача, являясь плохо обусловленной, может оказаться разрешимой столь неточно, что в этом будет отсутствовать практический смысл.
Чем можно охарактеризовать количественно обусловленность для линейных систем?
Пусть A — квадратная NxN — матрица.
Рассмотрим задачу Ax = b.
Пусть также некоторая норма в пространстве RN
Норма оператора A определяется стандартно:
Обозначим y = Ax и введем число m по правилу:
Величина называется числом обусловленности.
Очевидно:
- если A — диагональная, то (Для какой нормы, или для всех вышеприведенных?). Чем меньше число обусловленности C(A), тем лучше обусловлена система. Действительно, пусть вариация правой части, а соответствующее изменение решения.
Тогда справедливо следующее неравенство:
Доказательство. Имеем:
Имеем:
Так как
то
Аналогично, поскольку
Объединяя два неравенства, окончательно получаем для оценки погрешности:
В начало
Содержание портала
I.4. Решение систем линейных алгебраических уравнений методом обратной матрицы
(схема 17)
Матрица, имеющая отличный от нуля определитель, называется невырожденной; имеющая равный нулю определитель – вырожденной.
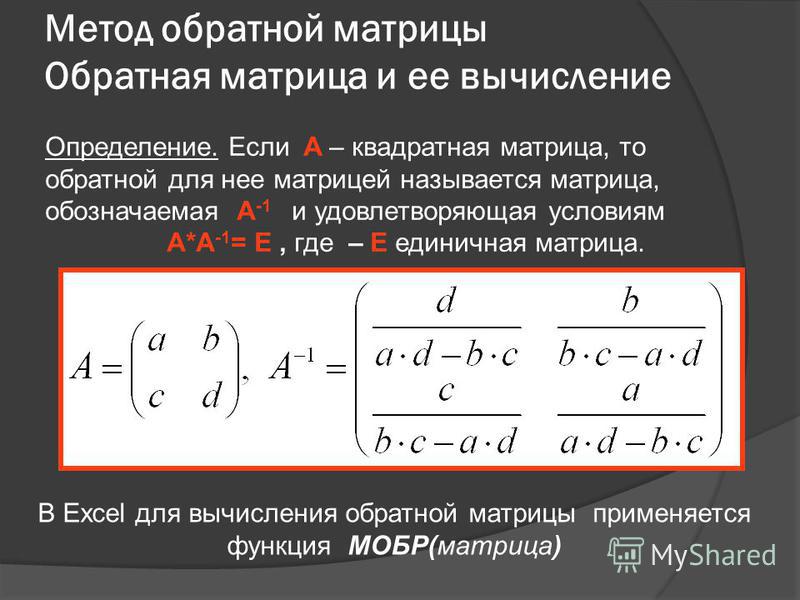
Матрица A-1 называется обратной для заданной квадратной матрицы , если при умножении матрицы на обратную ей как справа, так и слева, получается единичная матрица, то есть
A-1∙A=A∙A-1=E. (1.7)
Заметим, что в данном случае произведение матриц A и A-1 коммутативно.
Теорема 1.2. Необходимым и достаточным условием существования обратной матрицы для заданной квадратной матрицы, является отличие от нуля определителя заданной матрицы
Если главная матрица системы оказалась при проверке вырожденной, то для нее не существует обратной, и рассматриваемый метод применить нельзя.
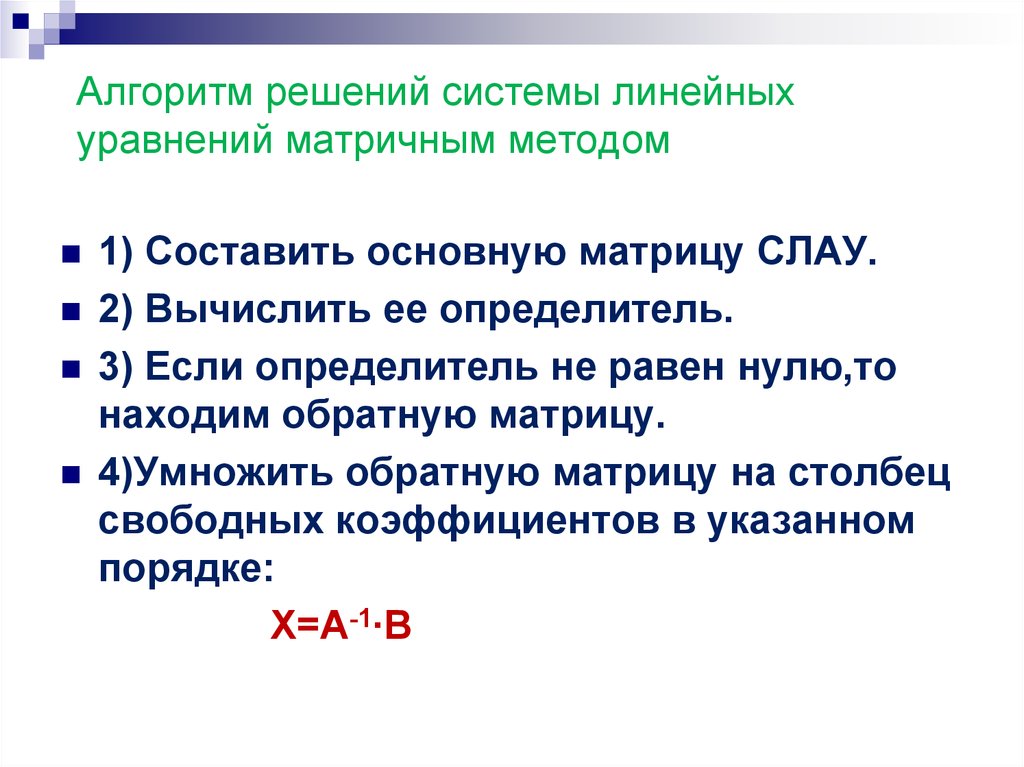
Для невырожденной матрицы можно найти обратную ей матрицу A-1 по следующему алгоритму.
1. Транспонируем матрицу A в матрицу AT .
2. Вычисляем
алгебраические дополнения элементов матрицы AT и записываем их в матрицу .
3. Составим обратную матрицу A-1 по формуле:
. (1.8)4. Сделаем проверку правильности найденной матрицы А-1 согласно формуле (1.7). Заметим, что данная проверка может быть включена в итоговую проверку самого решения системы.
Система (1.5) линейных алгебраических уравнений может быть представлена в виде матричного уравнения: A∙X=B, где A – главная матрица системы, – столбец неизвестных, – столбец свободных членов. Умножим это уравнение слева на обратную матрицу A-1, получим: A-1∙A∙X=A-1∙B. Так как по определению обратной матрицы A-1∙A=E, то уравнение принимает вид
E∙X=A-1∙B или X=A-1∙B . (1.9)
Таким образом, чтобы решить систему линейных алгебраических уравнений нужно столбец свободных членов умножить слева на матрицу, обратную для главной матрицы системы. После этого следует сделать проверку полученного решения.
Пример 1.6. Решить систему методом обратной матрицы
Решение. Вычислим главный определитель системы
.Следовательно, матрица невырожденная и обратная к ней матрица существует.
Найдём алгебраические дополнения всех элементов главной матрицы :
Запишем алгебраические дополнения в матрицу
. Воспользуемся формулами (1.8) и (1.9) для нахождения решения
системы
. Отсюда x=2, y=0, z=1
Воспользуемся формулами (1.8) и (1.9) для нахождения решения
системы
. Отсюда x=2, y=0, z=1 Системы линейных уравнений (Лекция №14)
Системой m линейных уравнений с n неизвестными называется система вида
где aij и bi (i=1,…,m; b=1,…,n) – некоторые известные числа, а x1,…,xn – неизвестные. В обозначении коэффициентов aij первый индекс iобозначает номер уравнения, а второй j – номер неизвестного, при котором стоит этот коэффициент.
Коэффициенты при неизвестных будем записывать в виде матрицы , которую назовём матрицей системы.
Числа, стоящие в правых частях уравнений, b1,…,bm называются свободными членами.
Совокупность n чисел c1,…,cn называется решением данной системы, если каждое уравнение системы обращается в равенство после подстановки в него чисел c1,…,cn вместо соответствующих неизвестных x1,…,xn.
Наша задача будет заключаться в нахождении решений системы. При этом могут возникнуть три ситуации:
- Система может иметь единственное решение.
- Система может иметь бесконечное множество решений. Например, . Решением этой системы является любая пара чисел, отличающихся знаком.
- И третий случай, когда система вообще не имеет решения. Например, , если бы решение существовало, то x1 + x2 равнялось бы одновременно нулю и единице.
Система линейных уравнений, имеющая хотя бы одно решение, называется совместной. В противном случае, т.е. если система не имеет решений, то она называется несовместной.
Рассмотрим
способы нахождения решений системы.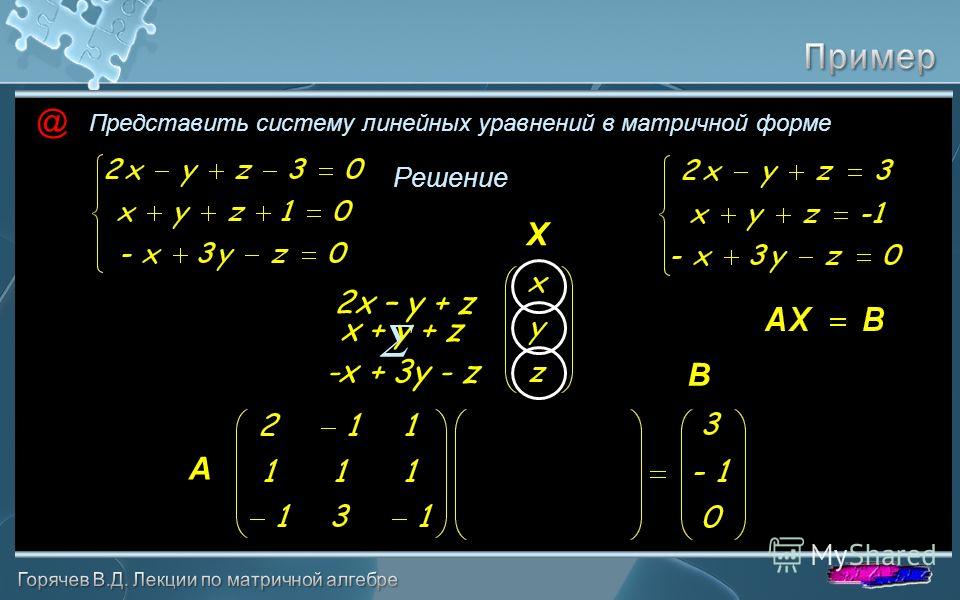
МАТРИЧНЫЙ МЕТОД РЕШЕНИЯ СИСТЕМ ЛИНЕЙНЫХ УРАВНЕНИЙ
Матрицы дают возможность кратко записать систему линейных уравнений. Пусть дана система из 3-х уравнений с тремя неизвестными:
Рассмотрим матрицу системы и матрицы столбцы неизвестных и свободных членов
Найдем произведение
т.е. в результате произведения мы получаем левые части уравнений данной системы. Тогда пользуясь определением равенства матриц данную систему можно записать в виде
или короче A∙X=B.
Здесь матрицы A и B известны, а матрица X неизвестна. Её и нужно найти, т.к. её элементы являются решением данной системы. Это уравнение называют матричным уравнением.
Пусть определитель матрицы отличен от нуля |A| ≠ 0. Тогда матричное уравнение решается следующим образом. Умножим обе части уравнения слева на матрицу A-1, обратную матрице A: . Поскольку A-1A = E и E∙X = X, то получаем решение матричного уравнения в виде X = A-1B.
Заметим, что поскольку обратную матрицу можно найти только для квадратных матриц, то матричным методом можно решать только те системы, в которых число уравнений совпадает с числом неизвестных. Однако, матричная запись системы возможна и в случае, когда число уравнений не равно числу неизвестных, тогда матрица A не будет квадратной и поэтому нельзя найти решение системы в виде X = A-1B.
Примеры. Решить системы уравнений.
Найдем матрицу обратную матрице A.
,
Таким образом, x = 3, y = – 1.
Итак, х1=4,х2=3,х3=5.
- Решите матричное уравнение: XA+B=C, где
Выразим искомую матрицу X из заданного уравнения.

Найдем матрицу А-1.
Проверка:
- Решите матричное уравнение AX+B=C, где
Из уравнения получаем .
Следовательно,

ПРАВИЛО КРАМЕРА
Рассмотрим систему 3-х линейных уравнений с тремя неизвестными:
Определитель третьего порядка, соответствующий матрице системы, т.е. составленный из коэффициентов при неизвестных,
называется определителем системы.
Составим ещё три определителя следующим образом: заменим в определителе D последовательно 1, 2 и 3 столбцы столбцом свободных членов
Тогда можно доказать следующий результат.
Теорема (правило Крамера). Если определитель системы Δ ≠ 0, то рассматриваемая система имеет одно и только одно решение, причём
Доказательство. Итак, рассмотрим систему 3-х уравнений с тремя неизвестными. Умножим 1-ое уравнение системы на алгебраическое дополнение A11 элемента a11, 2-ое уравнение – на A21 и 3-е – на A31:
Сложим эти уравнения:
Рассмотрим каждую из скобок и правую часть этого уравнения. По теореме о разложении определителя по элементам 1-го столбца
.
Далее рассмотрим коэффициенты при x2:
Аналогично можно показать, что и .
Наконец несложно заметить, что
Таким образом, получаем равенство: .
Следовательно, .
Аналогично выводятся равенства и , откуда и следует утверждение теоремы.
Таким образом, заметим, что если определитель системы Δ
≠ 0, то система имеет единственное решение и обратно. Если же
определитель системы равен нулю, то система либо имеет бесконечное множество
решений, либо не имеет решений, т.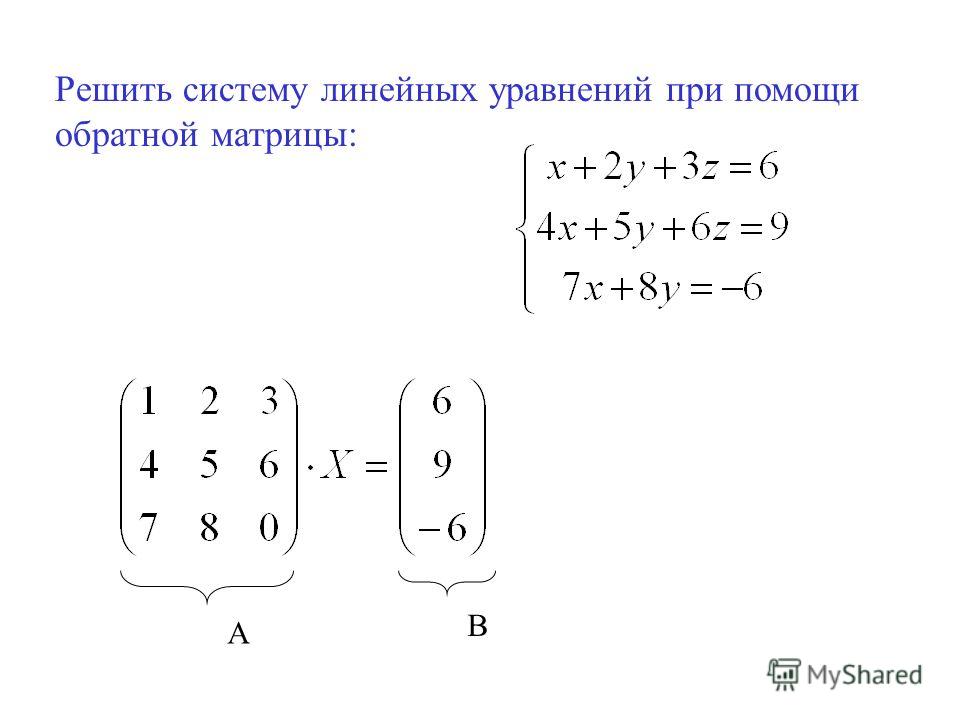 е. несовместна.
е. несовместна.
Примеры. Решить систему уравнений
Итак, х=1, у=2, z=3.
- Решите систему уравнений
при различных значениях параметра p:
Система имеет единственное решение, если Δ ≠ 0.
. Поэтому .
- При
- При p = 30 получаем систему уравнений которая не имеет решений.
- При p = –30 система принимает вид и, следовательно, имеет бесконечное множество решений x=y, yÎR.
МЕТОД ГАУССА
Ранее рассмотренные методы можно применять при решении только тех систем, в которых число уравнений совпадает с числом неизвестных, причём определитель системы должен быть отличен от нуля. Метод Гаусса является более универсальным и пригоден для систем с любым числом уравнений. Он заключается в последовательном исключении неизвестных из уравнений системы.
Вновь рассмотрим систему из трёх уравнений с тремя неизвестными:
.
Первое уравнение оставим без изменения, а из 2-го и 3-го исключим слагаемые, содержащие x1. Для этого второе уравнение разделим на а21 и умножим на –а11, а затем сложим с 1-ым уравнением. Аналогично третье уравнение разделим на а31 и умножим на –а11, а затем сложим с первым. В результате исходная система примет вид:
Теперь из последнего уравнения исключим слагаемое, содержащее x2. Для этого третье уравнение разделим на , умножим на и сложим со вторым. Тогда будем иметь систему уравнений:
Отсюда из последнего уравнения легко найти x3, затем из 2-го уравнения x2 и, наконец, из 1-го – x1.
При использовании метода Гаусса уравнения при необходимости можно менять
местами.
Часто вместо того, чтобы писать новую систему уравнений, ограничиваются тем, что выписывают расширенную матрицу системы:
и затем приводят её к треугольному или диагональному виду с помощью элементарных преобразований.
К элементарным преобразованиям матрицы относятся следующие преобразования:
- перестановка строк или столбцов;
- умножение строки на число, отличное от нуля;
- прибавление к одной строке другие строки.
Примеры: Решить системы уравнений методом Гаусса.
Вернувшись к системе уравнений, будем иметь
Выпишем расширенную матрицу системы и сведем ее к треугольному виду.
Вернувшись к системе уравнений, несложно заметить, что третье уравнения системы будет ложным, а значит, система решений не имеет.
Разделим вторую строку матрицы на 2 и поменяем местами первый и третий столбики. Тогда первый столбец будет соответствовать коэффициентам при неизвестной z, а третий – при x.
Вернемся к системе уравнений.
Из третьего уравнения выразим одну неизвестную через другую и подставим в первое.
Таким образом, система имеет бесконечное множество решений.
Решение СЛАУ и матрицы в Matlab
Доброго времени суток, читатели! Сегодня мы поговорим о матрицах в Matlab, об их применении в решении систем линейных алгебраических уравнений. Подробно разберем методы решения, и для этого необходимо знание нескольких базовых алгоритмов.
Также стоит отметить, что у каждого алгоритма, которым мы будем искать решение СЛАУ в Matlab, своя скорость нахождения этого решения, наличие или отсутствие условия выполнения алгоритма и т.д.
В традициях нашего сайта разберём на примере:
Решить систему линейных уравнений:
4*a + b - c = 6
a - b + c = 4
2*a - 3*b - 3*c = 4
Метод обратной матрицы в Matlab
Начнем с достаточно распространенного метода. Его суть состоит в том, что сначала необходимо выписать коэффициенты при a, b и c (то есть те коэффициенты, которые находятся слева) в одну матрицу, а свободный член (то есть то, что справа) в другую.
Его суть состоит в том, что сначала необходимо выписать коэффициенты при a, b и c (то есть те коэффициенты, которые находятся слева) в одну матрицу, а свободный член (то есть то, что справа) в другую.
В итоге у нас получится 2 матрицы:
A=[4 1 -1; 1 -1 1; 2 -3 -3]; % коэффициенты B=[6; 4; 4];
Для реализации этого метода (и следующих методов тоже) требуется одно условие: чтобы определитель матрицы, составленной из коэффициентов левой части не был равен нулю. Проверка на определитель:
det(A)
Вывод: 30
После проверки условия можем перейти к следующему шагу: нахождение обратной матрицы. В Matlab для этого используется оператор inv.
А само решение СЛАУ в Matlab находится как перемножение найденной обратной матрицы на матрицу свободных членов:
x=inv(A)*B Вывод: 2 -1 1
Мы получили 3 значения, которые и соответствуют нашим коэффициентам: то есть a = 2, b = -1, c = 1. Можете проверить, подставив полученные ответы в исходную систему, и убедиться, что мы решили СЛАУ правильно.
Также следует отметить, что матрицы нужно перемножать именно, как сделали мы, то есть слева обратная матрица, справа матрица свободных членов.
Если вы не все поняли, то советую вам почитать нашу статью по основам Matlab.
Метод Гаусса
Метод Гаусса в Matlab реализуется достаточно просто: для этого нам нужно всего лишь изучить один новый оператор.(\) - левое деление.
При следующей записи:
x = A\B Вывод: 2 -1 1
Мы получим ответы на нашу исходную систему. Только заметьте, мы решили СЛАУ стандартным набором функций в Matlab, и желательно этот оператор использовать когда матрица коэффициентов квадратная, так как оператор приводит эту матрицу к треугольному виду. В других случаях могут возникнуть ошибки.
Метод разложения матрицы
Теперь поговорим о разложении матрицы.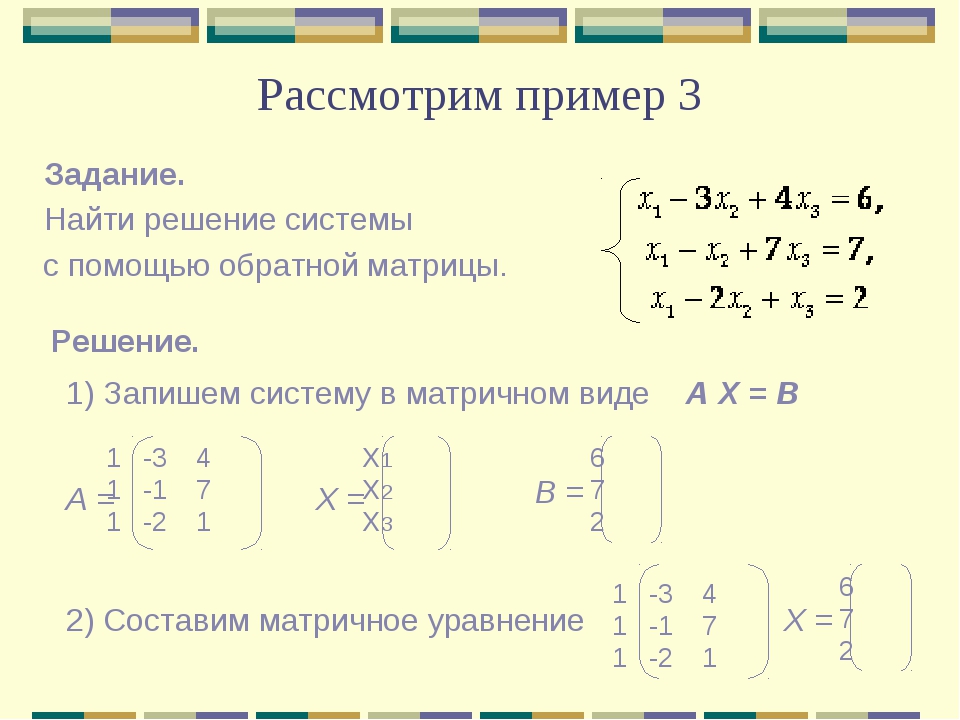 Нахождение решения через разложение матрицы очень эффективно. Эффективность обусловлена скоростью нахождения решения для данного вида систем и точностью полученных результатов.
Нахождение решения через разложение матрицы очень эффективно. Эффективность обусловлена скоростью нахождения решения для данного вида систем и точностью полученных результатов.
Возможны следующие разложения:
- разложение Холецкого
- LU разложение
- QR разложение
Разберём решение через LU и QR разложение, так как в задачах чаще всего встречается задание на решение именно через такие разложения.
Основное отличие этих двух разложений: LU разложение применимо только для квадратных матриц, QR — возможно и для прямоугольных.
LU разложение
Решим выше предложенную задачу через LU разложение:
[L, U] = lu(A);
Вывод:
L =
1 0 0
0.25 1 0
0.5 2.8 1
U =
4 1 -1
0 -1.25 1.25
0 0 -5
Затем:
y = L\B;
x = U\y
Вывод:
2
-1
1
QR разложение
И через QR разложение соответственно:
[Q, R] = qr(A); x = R\(Q'*B) Вывод: 2.0000 -1.0000 1.0000
Отметим, что апостроф ( ' ) после Q означает транспонирование.
Стандартные функции Matlab
Так же Matlab предлагает функцию linsolve, с помощью которой возможно решить систему линейных алгебраических уравнений. Выглядит это так:
x = linsolve(A,B) Вывод: 2 -1 1
Как видите, ничего сложного тут нет, на то они и стандартные функции Matlab.
Повторение
Итак, сегодня мы с вами изучили несколько методов для решения СЛАУ в Matlab, как с помощью матриц, так и с помощью стандартных функций. Давайте их повторим на другом примере:
Решить систему линейных уравнений:6*a - b - c = 0
a - 2*b + 3*d = 0
3*a - 4*b - 4*c = -1
A=[6 -1 -1; 1 -2 3; 3 -4 -4]; B=[0; 0; -1];
- Методом обратной матрицы:
x=inv(A)*B
Вывод:
0.0476
0.1810
0.1048
x = A\B
Вывод:
0.0476
0.1810
0. 1048
 1048
1048
[L, U] = lu(A);
y = L\B;
x = U\y
Вывод:
0.0476
0.1810
0.1048
[Q, R] = qr(A);
x = R\(Q'*B)
Вывод:
0.0476
0.1810
0.1048
На этом я с вами попрощаюсь, надеюсь, вы научились применять матрицы в Matlab для решения СЛАУ.
Поделиться ссылкой:
Похожее2. Методы решения систем линейных алгебраических уравнений Ч…
Привет, мой друг, тебе интересно узнать все про методы решения систем линейных алгебраических уравнений, тогда с вдохновением прочти до конца. Для того чтобы лучше понимать что такое методы решения систем линейных алгебраических уравнений , настоятельно рекомендую прочитать все из категории Численные методы
Прямые методы решения СЛАУ:
Метод Крамера
Метод обратной матрицы
Метод Гаусса
Итерационные методы решения линейных алгебраических систем :
Метод простой итерации или метод Якоби
Метод Гаусса – Зейделя
Метод Крамера решения систем линейных алгебраических уравнений
Решение cистем линейных алгебраических уравнений методом обратной матрицы
Исследование неоднородных систем линейных алгебраических уравнений
К решению систем линейных алгебраических уравнений сводятся многочисленные практические задачи ( по некоторым оценкам более 75% всех задач). Можно с полным основанием утверждать, что решение линейных систем является одной из самых распространенных и важных задач вычислительной математики.
Конечно, существует много методов и современных пакетов прикладных программ для решения СЛАУ, но для того, чтобы их успешно использовать, необходимо разбираться в основах построения методов и алгоритмов, иметь представления о недостатках и преимуществах используемых методов.
Постановка задачи
Требуется найти решение системы m линейных уравнений, которая записывается в общем виде как
,
Эту систему уравнений можно записать также в матричном виде:
,
где , , .
A – матрица системы, – вектор правых частей, – вектор неизвестных.
При известных A и требуется найти такие , при подстановке которых в систему уравнений она превращается в тождество.
Необходимым и достаточным условием существования единственного решения СЛАУ является условие det A≠0, т.е. определитель матрицы A не равен нулю. В случае равенства нулю определителя матрица A называется вырожденной и при этом СЛАУ либо не имеет решения, либо имеет их бесчисленное множество .
В дальнейшем будем предполагать наличие единственного решения.
Все методы решения линейных алгебраических задач можно разбить на два класса: прямые (точные) и итерационные (приближенные).
Прямые методы решения СЛАУ
Метод Крамера
При небольшой размерности системы m (m = 2,…,5) на практике часто используют формулы Крамера для решения СЛАУ:
(i = 1, 2, …, m). Эти формулы позволяют находить неизвестные в виде дробей, знаменателем которых является определитель матрицы системы, а числителем – определители матриц Ai, полученных из A заменой столбца коэффициентов при вычисляемом неизвестном столбцом свободных членов. Так А1 получается из матрицы А заменой первого столбца на столбец правых частей f.
Например, для системы двух линейных уравнений
Размерность системы (т.е., число m) является главным фактором, из–за которого формулы Крамера не могут быть использованы для численного решения СЛАУ большого порядка. При непосредственном раскрытии определителей решение системы с m неизвестными требует порядка m!*m арифметических операций. Таким образом, для решения системы, например, из m = 100 уравнений потребуется совершить 10158 вычислительных операций (процесс займет примерно 1019 лет), что не под силу даже самым мощным современным ЭВМ
Метод обратной матрицы
Если det A ≠ 0, то существует обратная матрица . Тогда решение СЛАУ записывается в виде: . Следовательно, решение СЛАУ свелось к умножению известной обратной матрицы на вектор правых частей. Таким образом, задача решения СЛАУ и задача нахождения обратной матрицы связаны между собой, поэтому часто решение СЛАУ называют задачей обращения матрицы. Проблемы использования этого метода те же, что и при использовании метода Крамера: нахождение обратной матрицы – трудоемкая операция.
Тогда решение СЛАУ записывается в виде: . Следовательно, решение СЛАУ свелось к умножению известной обратной матрицы на вектор правых частей. Таким образом, задача решения СЛАУ и задача нахождения обратной матрицы связаны между собой, поэтому часто решение СЛАУ называют задачей обращения матрицы. Проблемы использования этого метода те же, что и при использовании метода Крамера: нахождение обратной матрицы – трудоемкая операция.
Метод Гаусса
Наиболее известным и популярным прямым методом решения СЛАУ является метод Гаусса. Этот метод заключается в последовательном исключении неизвестных. Пусть в системе уравнений
первый элемент . Назовем его ведущим элементом первой строки. Поделим все элементы этой строки на и исключим x1 из всех последующих строк, начиная со второй, путем вычитания первой (преобразованной), умноженной на коэффициент при в соответствующей строке. Получим
.
Если , то, продолжая аналогичное исключение, приходим к системе уравнений с верхней треугольной матрицей
.
Из нее в обратном порядке находим все значения xi:
.
Процесс приведения к системе с треугольной матрицей называется прямым ходом, а нахождения неизвестных – обратным . Об этом говорит сайт https://intellect.icu . В случае если один из ведущих элементов равен нулю, изложенный алгоритм метода Гаусса неприменим. Кроме того, если какие–либо ведущие элементы малы, то это приводит к усилению ошибок округления и ухудшению точности счета. Поэтому обычно используется другой вариант метода Гаусса – схема Гаусса с выбором главного элемента. Путем перестановки строк, а также столбцов с соответствующей перенумерацией коэффициентов и неизвестных добиваются выполнения условия:
, j = i+1,i+ 2, …, m;
т.е. осуществляется выбор первого главного элемента. Переставляя уравнения так, чтобы в первом уравнении коэффициент a11 был максимальным по модулю. Разделив первую строку на главный элемент, как и прежде, исключают x1 из остальных уравнений. Затем для оставшихся столбцов и строк выбирают второй главный элемент и т.д.
Переставляя уравнения так, чтобы в первом уравнении коэффициент a11 был максимальным по модулю. Разделив первую строку на главный элемент, как и прежде, исключают x1 из остальных уравнений. Затем для оставшихся столбцов и строк выбирают второй главный элемент и т.д.
Рассмотрим применение метода Гаусса с выбором главного элемента на примере следующей системы уравнений:
В первом уравнении коэффициент при =0, во втором = 1 и в третьем = -2, т.е. максимальный по модулю коэффициент в третьем уравнении. Поэтому переставим третье и первое уравнение:
Исключим из второго и третьего уравнений с помощью первого. Во втором уравнении исключать не надо. Для исключения из третьего уравнения умножим первое на 0.5 и сложим с третьим:
Рассмотрим второе и третье уравнения. Максимальный по модулю элемент при в третьем. Поэтому поместим его на место второго:
Исключим из третьего уравнения. Для этого умножим второе на -0.5 и сложим с третьим:
Обратный ход: .
Проверка: 0.5*8+0=4, -3+8-0=5, -2*(-3)+0=6.
Такая перестановка уравнений необходима для того, чтобы уменьшить влияние ошибок округления на конечный результат.
Часто возникает необходимость в решении СЛАУ, матрицы которые являются слабо заполненными, т.е. содержат много нулевых элементов. В то же время эти матрицы имеют определенную структуру. Среди таких систем выделим системы с матрицами ленточной структуры, в которых ненулевые элементы располагаются на главной диагонали и на нескольких побочных диагоналях. Для решения систем с ленточными матрицами коэффициентов вместо метода Гаусса можно использовать более эффективные методы. Например, метод прогонки, который мы рассмотрим позже при решении краевой задачи для обыкновенного дифференциального уравнения второго порядка .
Итерационные методы решения линейных алгебраических систем
Метод простой итерации или метод Якоби
Напомним, что нам требуется решить систему линейных уравнений, которая в матричном виде записывается как:
,
где , , .
Предположим, что диагональные элементы матриц A исходной системы не равны 0 (aii ≠ 0, i = 1, 2, …, n). Разрешим первое уравнение системы относительно x1, второе относительно x2 и т.д. Получим следующую эквивалентную систему, записанную в скалярном виде:
(1),
Теперь, задав нулевое приближение , по рекуррентным соотношениям (1) можем выполнять итерационный процесс, а именно:
(2)
Аналогично находятся следующие приближения , где в (2) вместо необходимо подставить .
Или в общем случае:
. (3)
или
Условие окончания итерационного процесса .
Достаточное условие сходимости: Если выполнено условие диагонального преобладания, т.е. , то итерационный процесс (3) сходится при любом выборе начального приближения. Если исходная система уравнений не удовлетворяет условию сходимости, то ее приводят к виду с диагональным преобладанием.
Выбор начального приближения влияет на количество итераций, необходимых для получения приближенного решения. Наиболее часто в качестве начального приближения берут или .
Замечание. Указанное выше условие сходимости является достаточным, т.е. если оно выполняется, то процесс сходится. Однако процесс может сходиться и при отсутствии диагонального преобладания, а может и не сойтись.
Пример.
Решить систему линейных уравнений с точностью :
|
8 |
4 |
2 |
10 |
x1 |
||||
|
= |
3 |
5 |
1 |
= |
5 |
= |
x2 |
|
|
3 |
–2 |
10 |
4 |
x3 |
Решение прямыми методами, например, обратной матрицей, дает решение:
.
Найдем решение методом простой итерации. Проверяем условие диагонального преобладания: , , .
Приводим систему уравнений к виду (1):
.
Начальное приближение . Дальнейшие вычисления оформим в виде таблицы:
|
k |
x1 |
x2 |
x3 |
точность |
|
0 |
0 |
0 |
0 |
|
|
1 |
1.250 |
1.000 |
0.400 |
1.2500 |
|
2 |
0.650 |
0.170 |
0.225 |
0.8300 |
|
3 |
1.109 |
0.565 |
0.239 |
0.4588 |
|
……… |
||||
|
4 |
0. |
0.287 |
0.180 |
0.2781 |
|
5 |
1.061 |
0.419 |
0.185 |
0.1537 |
|
6 |
0.994 |
0.326 |
0.165 |
0.0931 |
|
7 |
1.046 |
0.370 |
0.167 |
0.0515 |
|
8 |
1.023 |
0.594 |
0.160 |
0.2235 |
|
9 |
0.913 |
0.582 |
0.212 |
0.1101 |
|
10 |
0.906 |
0. |
0.242 |
0.0764 |
|
11 |
0.937 |
0.495 |
0.229 |
0.0305 |
|
12 |
0.945 |
0.516 |
0.218 |
0.0210 |
|
…… |
||||
|
13 |
0.937 |
0.523 |
0.220 |
0.0077 |
 908
908 505
505Здесь
,
И т.д., пока не получим, в последнем столбце величину меньшую 0.01, что произойдет на 13 – ой итерации.
Следовательно, приближенное решение имеет вид:
Метод Гаусса – Зейделя
Расчетные формулы имеют вид:
т.е. для подсчета i–й компоненты (k+1)–го приближения к искомому вектору используется уже вычисленное на этом, т.е. (k+1)–м шаге, новые значения первых i–1 компонент.
Подробные формулы имеют вид:
Достаточное условие сходимости этого метода такое же, как и для метода простой итерации, т. е. диагональное преобладание:
е. диагональное преобладание:
Начальное приближение:
Найдем решение предыдущей системы уравнений методом Гаусса – Зейделя.
Расчетные формулы:
|
k |
x1 |
x2 |
x3 |
точность |
|
0 |
0 |
0 |
0 |
|
|
1 |
1.250 |
0.250 |
0.075 |
1.2500 |
|
2 |
1.106 |
0.321 |
0.132 |
0.1438 |
|
3 |
1.056 |
0.340 |
0.151 |
0.0500 |
|
4 |
1. |
0.344 |
0.156 |
0.0139 |
|
5 |
1.039 |
0.346 |
0.157 |
0.0036 |
 042
042Из таблицы видно, что нужная точность достигнута уже на 5–ой итерации вместо 13–ой по методу простой итерации и значения корней более близки к значениям, полученным методом обратной матрицы.
Тебе нравиться методы решения систем линейных алгебраических уравнений? илиу тебя есть полезные советы и дополнения? Напиши другим читателям ниже. Надеюсь, что теперь ты понял что такое методы решения систем линейных алгебраических уравнений и для чего все это нужно, а если не понял, или есть замечания, то нестесняся пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Численные методы
Разработка алгоритма решения систем линейных уравнений с варьируемыми параметрами, использующего разреженность матрицы
Блатов И. А., Китаева Е. В. Численные методы для разреженных матриц // Самара: Самарский гос. университет. 2010
Брумштейн Ю.М. Использование псеводогидродинамической постановки в задачах фильтрации со свободной поверхностью // Естественные науки, Астрахань: Изд.дом «Астраханский университет». 2004. № 8. С. 125-128.
Бутюгин Д.С., Ильин В.П., Перевозкин Д.В. Методы параллельного решения СЛАУ на системах с распределенной памятью в библиотеке Krylov // Вестник Южно-Уральского государственного университета. Серия: Вычислительная математика и информатика. 2012. № 47 (306). С. 22-36.
Серия: Вычислительная математика и информатика. 2012. № 47 (306). С. 22-36.
Джордж А., Лю Дж. Численное решение больших разреженных систем уравнений // М.: Мир. 1984. 333 с.
Игнатьев А.В., Ромашкин В.Н. Анализ эффективности методов решения больших разреженных систем линейных алгебраических уравнений // Интернет-Вестник ВолгГАСУ. 2008. № 3(6). С. 5.
Ильин В.П. Проблемы высокопроизводительных технологий решения больших разреженных СЛАУ // Вычислительные методы и программирование: новые вычислительные технологии. 2009. Т. 10. № 1. С. 141-147.
Крон Г. Исследование сложных систем по частям – диакоптика: Перевод с английского // М.: Наука. 1972. 544 с.
Кочура А.Е. Декомпозиция и технология разреженных матриц в современных вычислительных проблемах // Труды Международной научно-методической конференции «Математика в вузе». Псков. 1997.
Солнцева М.О., Кухаренко Б.Г. Применение методов кластеризации узлов на графах с разреженными матрицами смежности в задачах логистики // Труды Московского физико-технического института. 2013. Т. 5. № 3 (19). С. 75-83.
Писсанецки С. Технология разреженных матриц: Перевод с английского // М.: Мир. 1988. 410 c.
Уилкинсон Дж.Х., Райнш С. Справочник алгоритмов на языке Алгол. Линейная алгебра // М.: Машиностроение. 1976. 390 с.
Эварт Т.Е., Лазарева А.Б. Алгоритм решения систем линейных алгебраических уравнений с разреженными матрицами // Приволжский научный вестник. 2013. № 12-2 (28). С. 91-92.
Юлдашев А.В., Гатиятуллин М.З. Сравнительное исследование эффективности ряда библиотек реализующих алгоритмы решения разреженных матриц // Вектор науки Тольяттинского государственного университета. 2012. № 4 (22). С. 130-134.
Alaghband G. Parallel sparse matrix solution and performance // Parallel Computing. 1995.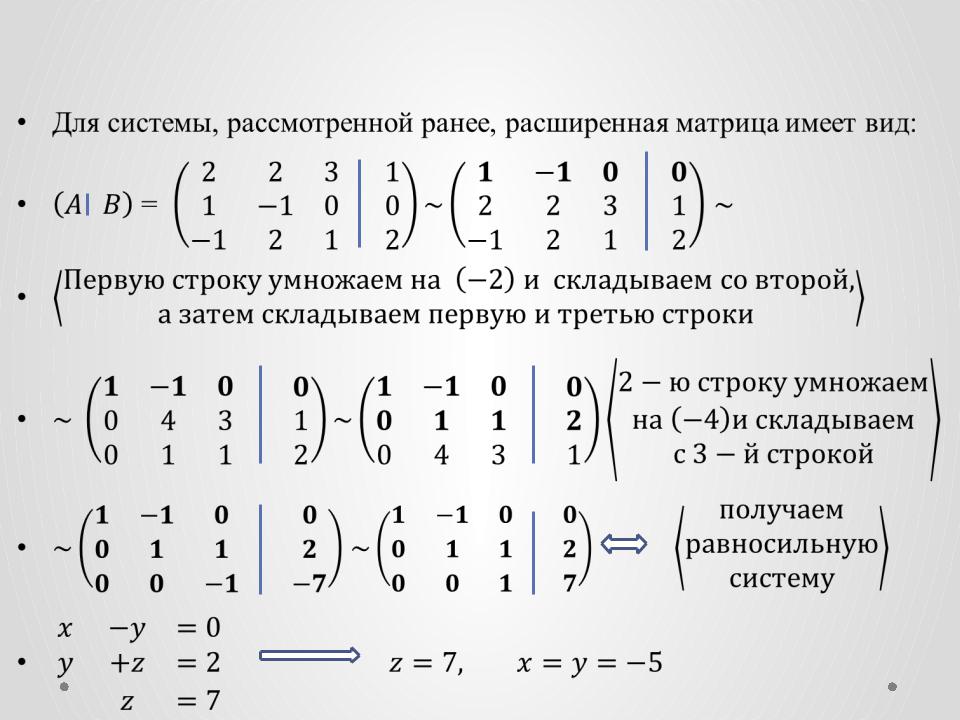 vol. 21. no. 9. pp. 1407-1430.
vol. 21. no. 9. pp. 1407-1430.
Borutzky W. Bond Graph Methodology: Development and Analysis of Multidisciplinary Dynamic System Models // Springer. 2009. 662 p.
Dehnavi M.M., Fernández D.M., Giannacopoulos D. Finite-element sparse matrix vector multiplication on graphic processing units // IEEE Transactions on Magnetics. 2010. vol. 46. no. 8. С. 2982-2985.
Saad Y. Iterative methods for sparse linear systems. SIAM. 2003. 528 p.
Sasaoka T., Kawabata H., Kitamura T. A matlab-based code generator for parallel sparse matrix computations utilizing PSBLAS // IEICE Transactions on Information and Systems. 2007. vol. E90-D. no. 1. P. 2.
Davis T.A., Hu Y. The university of Florida sparse matrix collection ACM Transactions on Mathematical Software (TOMS) // November 2011. vol. 38. Issue 1. Article no. 1.
Davis T.A. Direct Methods for Sparse Linear Systems. SIAM, 2006. 217 p.
Tran T.M., Gruber R., Appert K., Wuthrich S. A direct parallel sparse matrix solver // Computer Physics Communications. 1996. vol. 96. no. 2-3. pp. 118-128.
Решение систем линейных уравнений с использованием матриц
Привет! Эта страница будет иметь смысл только тогда, когда вы немного знаете о системах линейных уравнений и матриц, поэтому, пожалуйста, пойдите и узнайте о них, если вы их еще не знаете!
Пример
Одним из последних примеров систем линейных уравнений был этот:
Пример: Решить
- х + у + г = 6
- 2y + 5z = −4
- 2x + 5y — z = 27
Затем мы решили его, используя метод «исключения»… но мы можем решить это с помощью Матриц!
Использование матриц упрощает жизнь, потому что мы можем использовать компьютерную программу (например, Матричный калькулятор), чтобы выполнять всю «обработку чисел».
Но сначала нам нужно написать вопрос в матричной форме.
в матричной форме?
ОК. Матрица — это массив чисел, верно?
Матрица
Ну, подумайте об уравнениях:
| х | + | л | + | z | = | 6 |
| 2 года | + | 5z | = | −4 | ||
| 2x | + | 5лет | – | z | = | 27 |
Их можно было бы превратить в таблицу чисел вот так:
| 1 | 1 | 1 | = | 6 | ||
| 0 | 2 | 5 | = | −4 | ||
| 2 | 5 | -1 | = | 27 |
Мы могли бы даже разделить числа до и после «=» на:
| 1 | 1 | 1 | 6 | |
| 0 | 2 | 5 | и | −4 |
| 2 | 5 | -1 | 27 |
Теперь похоже, что у нас есть 2 матрицы.
На самом деле у нас есть третий, это [x y z]:
Почему [x y z] идет туда? Потому что, когда мы умножаем матрицы, левая часть становится:
Это исходная левая часть приведенных выше уравнений (вы можете это проверить).
Матричное решение
Мы можем написать это:
как это:
AX = B
где
- A — это матрица 3×3 коэффициентов x, y и z
- X — это x, y и z, и .
- B — это 6, −4 и 27
Тогда (как показано на странице инверсии матрицы) решение таково:
X = A -1 B
Что это значит?
Это означает, что мы можем найти значения x, y и z (матрица X), умножив , инверсную матрицу A , на матрицу B .
Итак, давайте продолжим и сделаем это.
Во-первых, нам нужно найти , обратную матрице A (при условии, что она существует!)
Используя Матричный калькулятор, получаем:
(определитель 1 / я оставил за пределами матрицы, чтобы числа упростить)
Затем умножьте A -1 на B (мы снова можем использовать Матричный калькулятор):
И готово! Решение:
x = 5,
y = 3,
z = −2
Как и на странице Системы линейных уравнений.
Довольно изящный и элегантный, человек думает, а компьютер производит вычисления.
Просто для развлечения … Сделай это снова!
Для удовольствия (и для того, чтобы помочь вам учиться), давайте проделаем все это снова, но сначала поставим матрицу «X».
Я хочу показать вам этот способ, потому что многие люди думают, что вышеприведенное решение настолько изящно, что это, должно быть, единственный способ.
Так что решим так:
XA = B
И из-за способа умножения матриц нам нужно настроить матрицы по-другому.Строки и столбцы необходимо поменять местами («транспонировать»):
И XA = B выглядит так:
Матричное решение
Тогда (также показано на странице инверсии матрицы) решение следующее:
X = BA -1
Это то, что мы получаем для A -1 :
На самом деле это то же самое, что и обратное, которое мы получили раньше, но транспонированное (строки и столбцы меняются местами).
Затем умножаем B на A -1 :
И решение то же:
x = 5, y = 3 и z = −2
Это выглядело не так красиво, как предыдущее решение, но оно показывает нам, что существует более одного способа составления и решения матричных уравнений.Только будьте осторожны со строками и столбцами!
Обращение матрицы
Пожалуйста, прочтите сначала наше Введение в матрицы.
Что такое обратная матрица?
Это обратное число :
Взаимное значение числа
Матрица , обратная матрице — это та же идея , но мы записываем ее A -1
Почему не 1 / A ? Потому что мы не делим по матрице! Да и вообще 1 / 8 тоже можно написать 8 -1
И есть другие сходства:
Когда мы умножаем число на его , обратное , мы получаем 1
Когда мы умножаем матрицу на ее обратную матрицу , мы получаем Матрицу идентичности (которая похожа на «1» для матриц):
То же самое, когда сначала идет обратное:
Идентификационная матрица
Мы только что упомянули «Матрицу идентичности».Это матричный эквивалент числа «1»:
.
Матрица идентификации 3×3
- Это «квадрат» (в нем столько же строк, что и столбцов),
- Он имеет 1 с по диагонали и 0 с по всей остальной части.
- Его символ — заглавная буква I .
Матрица идентичности может иметь размер 2 × 2 или 3 × 3, 4 × 4 и т. Д.
Определение
Вот определение:
Аргумент A равен A -1 , только если:
A × A -1 = A -1 × A = I
Иногда обратного нет вообще.
Матрица 2×2
Хорошо, как вычислить обратное?
Ну, для матрицы 2×2 обратное значение:
Другими словами: меняет местами позиции a и d, помещает негативов перед b и c, и делит все на определитель (ad-bc).
Давайте попробуем пример:
Как мы узнаем, что это правильный ответ?
Помните, что должно быть правдой следующее: A × A -1 = I
Итак, давайте посмотрим, что произойдет, если мы умножим матрицу на ее обратную:
И, привет !, мы получили Матрицу идентичности! Так что это должно быть правильно.
Должно быть также верно, что: A -1 × A = I
Почему бы вам не попробовать их умножить? Посмотрите, получите ли вы также Identity Matrix:
Зачем нужен инверс?
Потому что с матрицами мы не делим ! А если серьезно, то нет понятия деления матрицей.
Но мы можем умножить на обратное , что даст то же самое.
Представьте, что мы не можем делить на числа…
… и кто-то спрашивает «Как мне поделиться 10 яблоками с 2 людьми?»
Но мы можем взять , обратное к 2 (что составляет 0,5), поэтому мы ответим:
10 × 0,5 = 5
Они получают по 5 яблок.
То же самое можно сделать и с матрицами:
Допустим, мы хотим найти матрицу X, и мы знаем матрицы A и B:
XA = B
Было бы неплохо разделить обе стороны на A (чтобы получить X = B / A), но помните, что мы не можем разделить .
Но что, если мы умножим обе стороны на A -1 ?
XAA -1 = BA -1
И мы знаем, что AA -1 = I, поэтому:
XI = BA -1
Мы можем удалить I (по той же причине мы можем удалить «1» из 1x = ab для чисел):
X = BA -1
И у нас есть ответ (при условии, что мы можем вычислить A -1 )
В этом примере мы очень внимательно следили за правильностью умножения, потому что в случае с матрицами порядок умножения имеет значение.AB почти никогда не совпадает с BA.
Пример из реальной жизни: автобус и поезд
Группа поехала на автобусе по цене 3 доллара за ребенка и 3,20 доллара за взрослого на общую сумму 118,40 доллара.
Они вернулись на поезд по цене 3,50 доллара на ребенка и 3,60 доллара на взрослого, итого 135,20 доллара.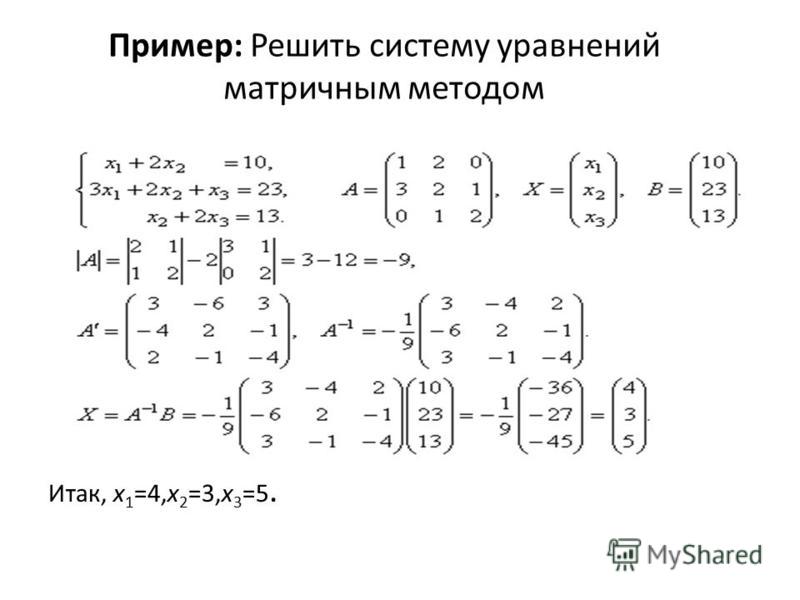
Сколько детей и сколько взрослых?
Во-первых, давайте настроим матрицы (будьте осторожны, чтобы строки и столбцы были правильными!):
Это как в примере выше:
XA = B
Итак, чтобы решить эту проблему, нам нужна обратная величина к «A»:
Теперь у нас есть обратное, которое мы можем решить с помощью:
X = BA -1
Было 16 детей и 22 взрослых!
Ответ кажется почти волшебным.Но он основан на хорошей математике.
Подобные вычисления (но с использованием гораздо больших матриц) помогают инженерам проектировать здания, используются в видеоиграх и компьютерной анимации, чтобы вещи выглядели трехмерными, и во многих других местах.
Это также способ решения систем линейных уравнений.
Расчеты производятся компьютером, но люди должны понимать формулы.
Порядок важен
Скажем, в данном случае мы пытаемся найти «X»:
AX = B
Это отличается от приведенного выше примера! X теперь после A.
Для матриц порядок умножения обычно меняет ответ. Не предполагайте, что AB = BA, это почти никогда не верно.
Так как же решить эту проблему? Используя тот же метод, но впереди поставьте A -1 :
A -1 AX = A -1 B
И мы знаем, что A -1 A = I, поэтому:
IX = A -1 B
Мы можем удалить I:
X = A -1 B
И у нас есть ответ (при условии, что мы можем вычислить A -1 )
Почему бы нам не попробовать наш пример с автобусом и поездом, но с данными, настроенными таким образом.
Это можно сделать таким образом, но мы должны быть осторожны при настройке.
Вот как это выглядит как AX = B:
Выглядит так аккуратно! Я думаю, что предпочитаю это так.
Также обратите внимание, как строки и столбцы меняются местами в
(«транспонировано»)
по сравнению с предыдущим примером.
Чтобы решить эту проблему, нам понадобится обратное к «А»:
Это похоже на обратное, которое мы получили раньше, но
транспонировано (строки и столбцы меняются местами).
Теперь мы можем решить, используя:
X = A -1 B
Тот же ответ: 16 детей и 22 взрослых.
Итак, матрицы — это мощная вещь, но их нужно правильно настраивать!
Обратное может не существовать
Во-первых, для инверсии матрица должна быть «квадратной» (то же количество строк и столбцов).
Но также определитель не может быть нулем (или мы закончим делением на ноль). Как насчет этого:
24-24? Это равно 0, а 1/0 не определено .
Мы не можем идти дальше!
У этой Матрицы нет Инверсии.
Такая матрица называется «сингулярной», что происходит только тогда, когда определитель равен нулю.
И это имеет смысл … посмотрите на числа: вторая строка просто вдвое больше первой строки, и не добавляет никакой новой информации .
И определитель сообщает нам об этом факте.
(Представьте, что в нашем примере с автобусом и поездом цены на поезд были ровно на 50% выше, чем на автобусе: так что теперь мы не можем найти никаких различий между взрослыми и детьми.Должно быть что-то, что их отличало бы.)
Большие матрицы
Обратный к 2×2 равен easy … по сравнению с более крупными матрицами (такими как 3×3, 4×4 и т. Д.).
Для этих больших матриц есть три основных метода вычисления обратного:
Заключение
- Аргумент A равен A -1 , только если A × A -1 = A -1 × A = I
- Чтобы найти обратную матрицу 2×2: поменять местами позиции a и d, поставить негативов перед b и c и разделить все на определитель (ad-bc).
- Иногда обратного нет вообще
Использование матриц для решения систем уравнений
Матричные уравнения
Матрицы могут использоваться для компактного написания и работы с системами множественных линейных уравнений.
Цели обучения
Определить, как матрицы могут представлять систему уравнений
Основные выводы
Ключевые моменты
- Если [latex] A [/ latex] является матрицей [latex] m \ times n [/ latex], а [latex] x [/ latex] обозначает вектор-столбец (т.е.е. [латекс] n \ умножить на 1 [/ latex] матрицу) [latex] n [/ latex] переменных [latex] x_1, x_2,…, x_n [/ latex], а [latex] b [/ latex] представляет собой [ latex] m \ times 1 [/ latex] вектор-столбец, тогда матричное уравнение будет: [latex] Ax = b [/ latex].
Ключевые термины
- матрица : прямоугольное расположение чисел или членов, имеющее различное применение, например преобразование координат в геометрии, решение систем линейных уравнений в линейной алгебре и представление графиков в теории графов.
Матрицы можно использовать для компактного написания и работы с системами уравнений.Как мы узнали в предыдущих разделах, матрицами можно манипулировать так же, как и нормальным уравнением. Это очень полезно, когда мы начинаем работать с системами уравнений. Полезно понять, как организовать матрицы для решения этих систем.
Написание системы уравнений с матрицами
Можно решить эту систему, используя метод исключения или замены, но также можно сделать это с помощью матричной операции. Прежде чем приступить к настройке матриц, важно сделать следующее:
- Убедитесь, что все уравнения написаны одинаково, то есть переменные должны быть в одном порядке.
- Убедитесь, что одна часть уравнения — это только переменные и их коэффициенты, а другая сторона — просто константы.
Решение системы линейных уравнений с использованием обратной матрицы требует определения двух новых матриц: [latex] X [/ latex] — это матрица, представляющая переменные системы, а [latex] B [/ latex] — это матрица, представляющая константы. {- 1} \ right) [/ latex], эта формула решит систему.
{- 1} \ right) [/ latex], эта формула решит систему.
Если матрица коэффициентов необратима, система может быть несовместимой и не иметь решения, или быть зависимой и иметь бесконечно много решений.
Матрицы и операции со строками
Две матрицы эквивалентны строкам, если одна может быть заменена другой последовательностью элементарных операций со строками.
Цели обучения
Объясните, как использовать операции со строками и почему они создают эквивалентные матрицы
Основные выводы
Ключевые моменты
- Элементарная операция со строкой — это любое из следующих действий: переключение строк (перестановка двух строк матрицы), умножение строк (умножение строки матрицы на ненулевую константу) или сложение строк (добавление к одной строке матрицы до некоторого числа, кратного другой строке).
- Если строки матрицы представляют собой систему линейных уравнений, то пространство строк состоит из всех линейных уравнений, которые могут быть выведены алгебраически из уравнений системы.
Ключевые термины
- пространство строки : набор всех возможных линейных комбинаций его векторов-строк.
- эквивалент строки : В линейной алгебре, когда одна матрица может быть заменена другой последовательностью элементарных операций со строками.
Элементарные операции со строками (ERO)
В линейной алгебре две матрицы эквивалентны строкам, если одна может быть заменена другой последовательностью элементарных операций со строками.В качестве альтернативы, две матрицы [latex] m \ times n [/ latex] эквивалентны строкам тогда и только тогда, когда они имеют одинаковое пространство строк. Пространство строки матрицы представляет собой набор всех возможных линейных комбинаций ее векторов-строк. Если строки матрицы представляют собой систему линейных уравнений, то пространство строк состоит из всех линейных уравнений, которые могут быть выведены алгебраически из уравнений системы. Две матрицы одинакового размера эквивалентны строкам тогда и только тогда, когда соответствующие однородные системы имеют одинаковый набор решений или, что эквивалентно, матрицы имеют одно и то же нулевое пространство.Поскольку элементарные операции со строками обратимы, эквивалентность строк является отношением эквивалентности. Обычно обозначается тильдой (~).
Операция элементарной строки — это любой из следующих трех ходов:
- Переключение строк (перестановка): поменять местами две строки матрицы.
- Умножение строк (масштаб): умножение строки матрицы на ненулевую константу.
- Сложение строк (сводная): прибавить к одной строке матрицы несколько значений, кратных другой строке.
Создание эквивалентных матриц с использованием элементарных операций со строками
Поскольку матрица по существу является коэффициентами и константами линейной системы, три операции со строками сохраняют матрицу.Например, замена двух строк просто означает изменение их положения в матрице. Кроме того, при решении системы линейных уравнений методом исключения, умножение строк будет таким же, как умножение всего уравнения на число для получения аддитивных обратных величин, так что переменная сокращается. Наконец, добавление строк аналогично методу исключения, когда для получения переменной выбирается сложение или вычитание одинаковых членов уравнений. Следовательно, операции со строками сохраняют матрицу и могут использоваться как альтернативный метод для решения системы уравнений.
Пример 1: Покажите, что эти две матрицы эквивалентны строкам:
[латекс] \ displaystyle A = \ begin {pmatrix} 1 & -1 & 0 \\ 2 & 1 & 1 \ end {pmatrix} \ quad B = \ begin {pmatrix} 3 & 0 & 1 \\ 0 & 3 & 1 \ end {pmatrix} [/ латекс]
Начните с [latex] A [/ latex], добавьте вторую строку к первой:
[латекс] \ displaystyle A = \ begin {pmatrix} 3 & 0 & 1 \\ 2 & 1 & 1 \ end {pmatrix} [/ latex]
Затем умножьте вторую строку на 3 и вычтите первую строку из второй:
[латекс] \ displaystyle A = \ begin {pmatrix} 3 & 0 & 1 \\ 3 & 3 & 2 \ end {pmatrix} [/ latex]
Наконец, вычтите первую строку из второй:
[латекс] \ displaystyle A = \ begin {pmatrix} 3 & 0 & 1 \\ 0 & 3 & 1 \ end {pmatrix} [/ latex]
Вы можете видеть, что [latex] A = B [/ latex], что мы достигли с помощью серии элементарных операций со строками.
Сокращение строк: решение системы линейных уравнений
В редукторе рядов, линейная система:
[латекс] \ displaystyle x + 3y-2z = 5 \\ 3x + 5y + 6z = 7 \ 2x + 4y + 3z = 8 [/ latex]
Представлен в виде расширенной матрицы:
[латекс] \ displaystyle A = \ begin {pmatrix} 1 & 3 & -2 & 5 \\ 3 & 5 & 6 & 7 \\ 2 & 4 & 3 & 8 \ end {pmatrix} [/ latex]
Затем эта матрица модифицируется с использованием операций с элементарными строками до тех пор, пока она не достигнет уменьшенной формы эшелона строк.
Поскольку эти операции обратимы, полученная расширенная матрица всегда представляет собой линейную систему, эквивалентную исходной.
Существует несколько конкретных алгоритмов сокращения строк расширенной матрицы, простейшими из которых являются исключение Гаусса и исключение Гаусса-Жордана. Это вычисление может быть выполнено вручную (с использованием трех типов ERO) или на калькуляторе с использованием матричной функции «rref» (сокращенная форма эшелона строк).
Окончательная матрица представлена в виде уменьшенного ряда строк и представляет систему [латекс] x = -15 [/ latex], [latex] y = 8 [/ latex] [latex] z = 2 [/ latex].
[латекс] \ displaystyle A = \ begin {pmatrix} 1 & 0 & 0 & 0 & -15 \\ 0 & 1 & 0 & 8 \\ 0 & 0 & 1 & 2 \ end {pmatrix} [/ latex]
Упрощение матриц с помощью операций со строками
Используя элементарные операции, метод исключения Гаусса приводит матрицы к форме эшелона строк.
Цели обучения
Используйте операции с элементарными строками, чтобы представить матрицу в упрощенном виде
Основные выводы
Ключевые моменты
- Поскольку элементарные операции со строками сохраняют пространство строк матрицы, пространство строк формы эшелона строк такое же, как и у исходной матрицы.
- Существует три типа операций с элементарными строками: меняют местами две строки, умножают строку на ненулевой скаляр и добавляют к одной строке скалярное значение, кратное другой.
- На практике обычно не рассматривают системы в терминах уравнений, а вместо этого используют расширенную матрицу (которая также подходит для компьютерных манипуляций).
Ключевые термины
- Расширенная матрица : Матрица, полученная путем добавления столбцов двух заданных матриц, обычно с целью выполнения одних и тех же элементарных операций со строками для каждой из данных матриц.
С помощью конечной последовательности элементарных операций со строками, называемых исключением по Гауссу, любую матрицу можно преобразовать в форму эшелона строк. Это преобразование необходимо для решения системы линейных уравнений.
Прежде чем углубляться в детали, следует упомянуть несколько ключевых терминов:
- Расширенная матрица : расширенная матрица — это матрица, полученная путем добавления столбцов двух заданных матриц, обычно с целью выполнения одних и тех же операций с элементарной строкой для каждой из данных матриц.
- Форма верхнего треугольника : Квадратная матрица называется верхней треугольной, если все элементы ниже главной диагонали равны нулю. Треугольная матрица — это нижняя или верхняя треугольная матрица. Матрица, имеющая одновременно верхний и нижний треугольники, является диагональной матрицей.
- Элементарные операции со строками : Поменять местами строки, добавить строки или умножить строки.
Исключение по Гауссу
- Напишите расширенную матрицу для линейных уравнений.
- Используйте элементарные операции со строками в расширенной матрице [latex] [A | b] [/ latex], чтобы преобразовать [latex] A [/ latex] в форму верхнего треугольника. Если на диагонали находится ноль, переключайте строки, пока на его месте не окажется ненулевое значение.
- Используйте обратную замену, чтобы найти решение.
Пример 1: Решите систему методом исключения Гаусса:
[латекс] \ displaystyle 2x + y-z = 8 \\ -3x-y + 2z = -11 \ -2x + y + 2z = -3 [/ latex]
Запишите расширенную матрицу:
[латекс] \ left [\ begin {array} {rrr | r} 2 & 1 & -1 & 8 \\ -3 & -1 & 2 & -11 \\ -2 & 1 & 2 & -3 \ end {array} \ right] [/ latex]
Используйте элементарные операции со строками, чтобы уменьшить матрицу до уменьшенной формы эшелона строк:
[латекс] \ left [\ begin {array} {rrr | r} 1 & 0 & 0 & 2 \\ 0 & 1 & 0 & 3 \\ 0 & 0 & 1 & -1 \ end {array} \ right ] [/ латекс]
Используя элементарные операции со строками для получения сокращенной формы эшелона строк (‘rref’ в калькуляторе), решение системы отображается в последнем столбце: [latex] x = 2, y = 3, z = -1 [/ latex] .
Решение систем линейных уравнений с использованием матриц
Если нужно, просмотрите матрицы , матричные операции со строками а также решение систем линейных уравнений перед прочтением этой страницы.
В матричный метод решения систем линейных уравнений — это просто метод устранения в маскировке. При использовании матриц запись становится немного проще.
Предположим, у вас есть система линейных уравнений, например:
{ 3 Икс + 4 y знак равно 5 2 Икс — y знак равно 7
Первый шаг — преобразовать это в матрицу.Убедитесь, что все уравнения имеют стандартную форму ( А Икс + B y знак равно C ) , и используйте коэффициенты каждого уравнения для формирования каждой строки матрицы. Это может помочь вам разделить правый столбец пунктирной линией.
[ 3 4 2 — 1 | 5 7 ]
Далее мы используем матричные операции со строками изменить 2 × 2 матрицу слева на единичная матрица .Во-первых, мы хотим получить ноль в строке 1 , Столбец 2 . Итак, добавляем 4 раз Строка 2 грести 1 .
[ 11 0 2 — 1 | 33 7 ] → добавлен ( 4 × Строка 2 ) к Строка 1
Далее мы хотим 1 в верхнем левом углу.
[ 1 0 2 — 1 | 3 7 ] → разделенный Строка 1 от 11
Теперь нам нужен ноль в нижнем левом углу.
[ 1 0 0 — 1 | 3 1 ] → добавлен ( — 2 × Строка 1 ) к Строка 2
Наконец, мы хотим 1 в строке 2 , Столбец 2 .
[ 1 0 0 1 | 3 — 1 ] → умноженный Строка 2 от — 1
Теперь, когда у нас есть 2 × 2 Слева единичная матрица, мы можем считать решения из правого столбца:
Икс знак равно 3 y знак равно — 1
Тот же метод можно использовать для п линейные уравнения в п неизвестные; в этом случае вы создадите п × ( п — 1 ) матрица и используйте операции со строками матрицы, чтобы получить тождество п × п матрица слева. {- 1} = \ frac {1} {3 \ cdot -1-1 \ cdot 2} \ begin {bmatrix} -1 & -1 \\ -2 & 3 \ end {bmatrix} = $$
$$ = — \ frac {1} {5} \ begin {bmatrix} -1 & -1 \\ -2 & 3 \ end {bmatrix} $$
Следующий шаг — умножить обе части матричного уравнения на обратную матрицу:
$$ — \ frac {1} {5} \ begin {bmatrix} -1 & -1 \\ -2 & 3 \ end {bmatrix} \ begin {bmatrix} 3 & 1 \\ 2 & -1 \ end {bmatrix } \ cdot \ begin {bmatrix} x \\ y \\ \ end {bmatrix} = — \ frac {1} {5} \ begin {bmatrix} -1 & -1 \\ -2 & 3 \ end {bmatrix} \ begin {bmatrix} 5 \\ 0 \ end {bmatrix} $$
$$ — \ frac {1} {5} \ begin {bmatrix} -5 & 0 \\ 0 & -5 \ end {bmatrix} \ cdot \ begin {bmatrix} x \\ y \ end {bmatrix} = — \ frac {1} {5} \ begin {bmatrix} -5 \\ -10 \ end {bmatrix} $$
$$ \ begin {bmatrix} 1 & 0 \\ 0 & 1 \ end {bmatrix} \ cdot \ begin {bmatrix} x \\ y \ end {bmatrix} = \ begin {bmatrix} 1 \\ 2 \ end { bmatrix} $$
Наше решение — (1,2), самый простой способ проверить, правы ли мы, — это подставить наши значения в наши исходные уравнения.
Видеоурок
Пример выше в видеоформате.
Решение систем линейных уравнений с матрицами
Legal Matrix Operations
Рисунок 1
На Рисунке 1 выше вы можете видеть нормальный решение системы уравнений черным шрифтом написание слева. Этот Система была решена путем сложения двух уравнений.Это добавление вызвало переменная y , которую нужно отбросить, и в результате получилось уравнение с одной переменной. Этот позволил нам решить для x . Как только мы узнали x , мы могли легко найти y .
Справа на Рисунке 1 выше, в
синяя надпись , вы можете увидеть аналогичную работу, выполняемую над строками матрицы.
Строка матрицы 1,1,8 просто представляет собой уравнение: 1 x + 1 y = 8.
Таким образом, строка матрицы — это просто коэффициенты из уравнения.Матрица
ряд 1, -1,4
представляет собой уравнение:
1 x — 1 y = 4.
Так же, как для нас это законное добавление двух уравнений слева мы можем добавлять в строки справа. Вы можете это увидеть в строке с надписью a + b -> a , где вы видите новый ряд 2,0,12. Это просто сумма строк a и b . Следующий ряд: a — b -> b показывает результат вычитания строки b из строки a , а именно, 0,2,4.
Последний раздел справа показывает, что просто так как разрешено умножать уравнение на число или делить уравнение на число, также допустимо умножение или деление строки матрицы на число (скаляр).
В левом нижнем углу краткое изложение юридических операции с матрицами. Вы можете законно пройти любую из этих трех процедур. Вы также можете выполнить любую комбинацию этих трех операций. Действительно, эти легальные операции — это те же юридические операции, которым вы ранее научились использовать в алгебре.
Решение системы уравнений с использованием Алгебра
Рисунок 2
На рисунке 2 выше мы принимаем решение система сначала использует методы алгебры, которые вы должны знать из своей алгебры задний план. Система трех уравнений показана вверху слева. Сначала я напоминают вам о том, что если вы решаете систему с 3-мя переменными, вы нужно 3 уравнения. Если вы решаете систему с 9 переменными, вам нужно 9 уравнения.В общей ситуации, если вы решаете систему с n переменных, вам понадобится n уравнение. Итак, вы видите, что для этой системы с 3 переменных, у нас есть 3 уравнения.
В процессе решения такой системы мы необходимо исключить переменные, пока мы не придем к уравнению с 1 переменной. Поэтому нам нужно найти способы легального избавления от некоторых переменных.
Вы можете заметить, что если вы добавите уравнения a и b , вы можете отбросить переменную y .Вы также можете получить y, чтобы отбросить, если вы добавите уравнения b и c .
Теперь у нас осталось 2 уравнения с 2 переменные. Выше эти уравнения обозначены уравнениями d и e . Нам еще нужно избавиться от еще одной переменной. Мы видим, что если мы умножим уравнение d на 2, и прибавив его к уравнению e , мы действительно можем решить для одной из наших переменных. Получаем, что x = 1.Это не займет слишком много времени дольше, чтобы увидеть из уравнения b, что y должен быть равен -2. И наконец, подставив x = 1 и y = -2 в уравнение a , мы можем найдите, что z должно быть равно -1. Мы не закончим, пока не проверим все три приводит к каждому из трех уравнений, с которых мы начали.
Красная стрелка на рисунке 2 указывает на матрицу форму тех же трех уравнений, с которых мы начали. Эта матрица 3 x 4 имеет квадрат матрица слева и дополнительный столбец справа.Поскольку в этой матрице была добавлена, ее иногда называют расширенной матрицей . Сейчас мы будем работать над решением этой же системы, просто используя матрицу.
Рисунок 3
На рисунке 3 выше показаны два важных элемента. для нашей процедуры матричного решения. В верхней части рисунка 3 вы видите «желаемая цель». Это форма, в которой мы хотим, чтобы наша матрица была по образцу. Обратите внимание, что мы хотим, чтобы левая часть матрицы стала тождеством матрица .Также будет дополнительный столбец с тремя величинами в них. Эти величины a , b и c , причем решения системы. Верхняя строка гласит: «1 x + 0 y + 0 z . = a «, что фактически означает:» x = a «. вторая действующая строка говорит: « y = b ». Третья линия в действительности говорит: « z = c .»Итак, матрица в таком виде полностью решено.
Вторая часть рисунка 3 выше — это рекомендуемый стратегический порядок получения левой части матрицы преобразованы в единичную матрицу . Причина дать вам этот рекомендуемый стратегический порядок состоит в том, чтобы минимизировать или исключить потраченные впустую усилие. По мере того, как мы решаем проблему ниже, вы в конечном итоге увидите, что это порядок поможет исключить любую бесполезную работу.
Рисунок 4
На Рисунке 4 выше мы видим, что 1 в второй ряд обведен кружком. Это потому, что в нашем стратегическом плане заказов мы в первую очередь преобразовывая эту первую ячейку во вторую строку. Что мы хотим этого первая ячейка во второй строке стать? Беглый взгляд на рисунок 3 должен сказать нам, что мы хотим, чтобы это было нулем. Как мы можем сделать так, чтобы это стало нулем? Хорошо, мы, конечно, должны следовать только юридическим операциям, показанным на Рисунке 1.Один план, который достигнет этого, состоит в том, чтобы умножить строку b на -2 и добавить результат в строку a . Затем мы поместим результат в строку b . Этот символизируется выше с обозначением -2 b + a -> b . Конечно, мы должны выполнить эту операцию для каждого числа в строке b . (всего их 4) Во второй матрице вы можете увидеть результат после переноски из этой операции.
Рисунок 5
Следующее число, которое нам нужно изменить, — это нижний левый элемент, обведенный кружком на Рисунке 5 выше. Нам снова это нужно число, которое нужно преобразовать в ноль. Мы видим, что строка b не делает хорошо. Ноль плюс ничего не меняет. Итак, теперь мы знаем, что у нас есть использовать строку a . Мы могли бы взять 3 раза строку a и -2 раза строку c . Сложение этих двух вместе даст ноль в первой позиции.Рисунок 5. показывает, что произойдет, если вы выполните этот план для всего ряда.
Фиг.6
Следующее число, которое нам нужно изменить, — это второй элемент в строке c . Нам нужно, чтобы этот элемент был нулем. Это очень на данном этапе проблемы важно помнить, что пока мы хотим измените второй элемент в строке c , нам нужно защитить ноль, который мы ранее поменял на ноль. Чтобы защитить ноль в первом позиции, нам нужно работать со строкой, у которой также есть ноль в первом должность.Это говорит нам, что нам нужно выполнить операцию, которая включает строку b . Наш план состоит в том, чтобы умножить -3 на строку c , добавить к b и положить c . Проделайте эту операцию и посмотрите, получите ли вы тот же нижний ряд, что и на рисунке 6. выше.
Рисунок 7
Следующее число, которое нам нужно изменить, — это второй элемент в строке b . Это первый элемент, который мы хотим преобразовать в 1.Вам понравятся эти преобразования. Чтобы преобразовать element на 1, требуется только однострочная операция. Все, что вам нужно сделать, это разделите каждый элемент строки b на -3. Результаты вернутся в ряд б . См. Результаты на Рисунке 7 выше.
Рисунок 8
Следующий элемент, который нужно преобразовать является третьим элементом в строке c . Его нужно преобразовать в 1. Преобразования элемента в единицу — самые простые из всех.Опять же, все мы необходимо умножить каждый элемент в строке c на -1/20.
Рисунок 9
Наше следующее преобразование — третий элемент в ряд б . Этот элемент должен быть нулем. Проблема здесь заключается в том, чтобы «защитить» первые два элемента этого ряда, над которыми мы работали трудно получить в их нынешнем виде. Два начальных нуля в строке c равны идеальная защита для этих двух элементов.Следовательно, мы хотим сделать a b, c операция. Наш план состоит в том, чтобы умножить строку c на 1/3 и добавить результат к b .
Фиг.10
Два ряда готово! Обратите внимание, что теперь строки b и c полностью выполнены. Сейчас мы работаем над преобразованием третьего элемент в строке до нуля. В строке a нет ничего, что нуждается в защите. Мы просто вычтем строку из минус строка c , и поместите результат обратно в строку a .
Рисунок 11
Теперь нам нужно преобразовать второй элемент в ряд в ноль. У нас есть один элемент для защиты в строке a , поэтому мы замечаем, что строка b является идеальной защитой, потому что она имеет ноль в третья позиция. Здесь мы можем просто добавить строку a к строке b и положить в ряду a .
Рисунок 12
Последний элемент, который нужно преобразовать.Потому что это Элемент должен быть единицей, мы можем просто разделить строку и на 2. Готово! Теперь, поскольку матрица имеет единичную матрицу слева, наши ответы таковы: сидит в третьем столбце. Система решена.
Особые ситуации
Некоторые системы уравнений не имеют решения. Если вы изображаете система уравнений выше как система трех линий в трехмерном космос.тогда вы можете хорошо представить, что 3 такие линии не должны пересекаться в 1 общая точка. На самом деле, они довольно редко пересекаются за один общая точка.
При решении матриц мы изо всех сил пытаемся левая часть матрицы в единичную матрицу. Если в матрице нет решение, то вы увидите матрицы, которые в конечном итоге будут выглядеть так:
Обратите внимание, что нижняя строка фактически сообщает нам, что 0 * X + 0 * Y
+ 0 * Z = 1, что невозможно.Это наша реплика, что это невозможно
матрица для поиска единственного решения.
Другой тип матрицы может возникнуть в результате наших усилий по достижению единичная матрица в левой части матрицы. Ниже представлен этот тип:
Здесь у нас уникальный нижний ряд всех нулей. Алгебраический уравнение, которое это представляет, а именно, 0 * X + 0 * Y + 0 * Z = 0, верно. это правда, но это определенно ничего не говорит нам о системе уравнения.Эта система имеет бесконечно много решений.
Вы должны уметь распознавать эти два особых типа результатов матрицы и что они означают.
Решение линейных систем с использованием матричной алгебры — концепция
Одно из наиболее часто используемых приложений квадратных матриц — решение систем линейных уравнений. Методы решения систем линейных уравнений с использованием алгебры матриц намного более эффективны, чем ручное вычисление систем с использованием подстановки.Это особенно верно при работе с системами из 3 или более переменных. Два метода матричной алгебры включают сокращение строк и поиск обратного.
Матричные алгебры можно использовать для решения линейных систем уравнений, мы покажем вам, как это сделать, но прежде всего позвольте мне взглянуть на 3 матрицы a, x и b. И давайте заметим, что представляет собой уравнение, матричное уравнение ax = b, умноженное на это, теперь ax равно 5, -3, 7, -4 справа x равно xy, это 2 на 1.И если я умножу это, я получу 5x-3y и 7x-4y правильно, я получу эту матрицу 2 на 1, и эта матрица равна b 5,6. Теперь вы знаете, что две матрицы равны только в том случае, если они имеют одинаковые размеры, они обе 2 на 1, и обе имеют одинаковые точные равные элементы, поэтому 5x-3y должно быть равно 5, а 7x-4y должно быть равно 6, поэтому позвольте мне просто запишите, что 5x-3y = 5, 7x-4y = 6, теперь эта система представляет собой систему линейных уравнений, эта линейная система полностью эквивалентна матричному уравнению ax = b, и это предлагает способ, которым мы можем использовать матричные уравнения для решения линейные системы, поэтому давайте сосредоточимся на решении этой линейной системы.
Теперь, прежде всего, когда вы превращаете линейную систему в матричное уравнение, давайте заметим, что в левой части вам нужны ваши члены x и y, и вы хотите, чтобы они были в таком порядке, так что эти числа здесь называются коэффициентами и что вы хотите сделать, вы хотите придумать матрицу коэффициентов для системы, и это может быть 5, -3, 7, -4, это матрица a, а затем переменная матрица xy, которая это, а затем постоянная матрица 5,6 матрица b.
Как теперь решить матричное уравнение ax = b? Что ж, оказывается, что это в основном похоже на линейное уравнение с действительными числами, с той лишь разницей, что мы не можем делить на матрицы, нет способа делить на матрицы, но вы можете умножить на обратное, поэтому, если матрица a имеет обратную вам можно умножить на обратное и вспомнить, когда вы умножаете обе стороны на матрицу, вам нужно умножить либо обе стороны слева, либо обе стороны справа, потому что умножение матриц не коммутативно хорошо, что вы собираетесь получить здесь обратное время a — это единичная матрица, умноженная на x, а единичная матрица, умноженная на x, будет x, так что это x равно обратному b, это на самом деле ваше решение, у вас будет xy, равное, а затем некоторые числа, поэтому все, что вам нужно сделать, это выяснить, что обратная матрица a есть.